//////////////////////////////// 1$
//
СП СО
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОТЕХНИЧЕСКИЙ КОМПЛЕКС ПОРШНЕВОГО КОМПРЕССОРА НА ОСНОВЕ ЛИНЕЙНОЙ МАГНИТОЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2019 |
|
RU2720882C1 |
| Магнитоэлектрический датчик момента | 1978 |
|
SU892592A1 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2019 |
|
RU2707559C1 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2023 |
|
RU2810637C1 |
| МАГНИТНАЯ СИСТЕМА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2012 |
|
RU2505784C2 |
| СЕЙСМОПРИЕМНИК УСКОРЕНИЙ | 1994 |
|
RU2098844C1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1352235A1 |
| ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 1999 |
|
RU2173499C2 |
| ИНДУКЦИОННЫЙ ЗОНД ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФЕКТОВ ОБСАДНОЙ КОЛОННЫ И НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 2003 |
|
RU2247240C1 |
| ГЕНЕРАТОР ДЛЯ ВЕТРОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2022 |
|
RU2797718C1 |

Изобретение относится к электротехнике и может быть использовано в линейных электроприводах. Целью является расширение эксплуатационных возможностей путем регулирования тягового усилия. Линейный электродвигатель содержит два параллельных стержня 1 с обмотками управления, подвижный элемент, выполненный в виде постоянного магнита 2 с полюсными наконечниками 3 и компенсирующими катушками 4. Полюсные наконечники и компенсирующие катушки охватывают стержни 1. При протекании электрического тока в обмотках управления возникает основная магнитодвижущая сила, при протекании тока в компенсирующих катушках - дополнительная магнитодвижущая сила. Для получения равномерного тягового усилия направление тока в компенсирующих катушках должно совпадать с направлением тока в обмотках управления. Положительный эффект достигается использованием магнитоэлектрической силы, возникающей при взаимодействии магнитных потоков рассеяния с электрическим током, протекающим в компенсирующих катушках. 4 ил.
2
- J 4
W6
у
g
СО
Изобретение относится к электротехнике, в частности к линейным электродвигателям, и может быть использовано в электроприводах прецизионных 5 устройств, например, в фотограмметрических приборах.
Цель изобретения - расширение эксплуатационных возможностей путем регулирования тягового усилия. 10
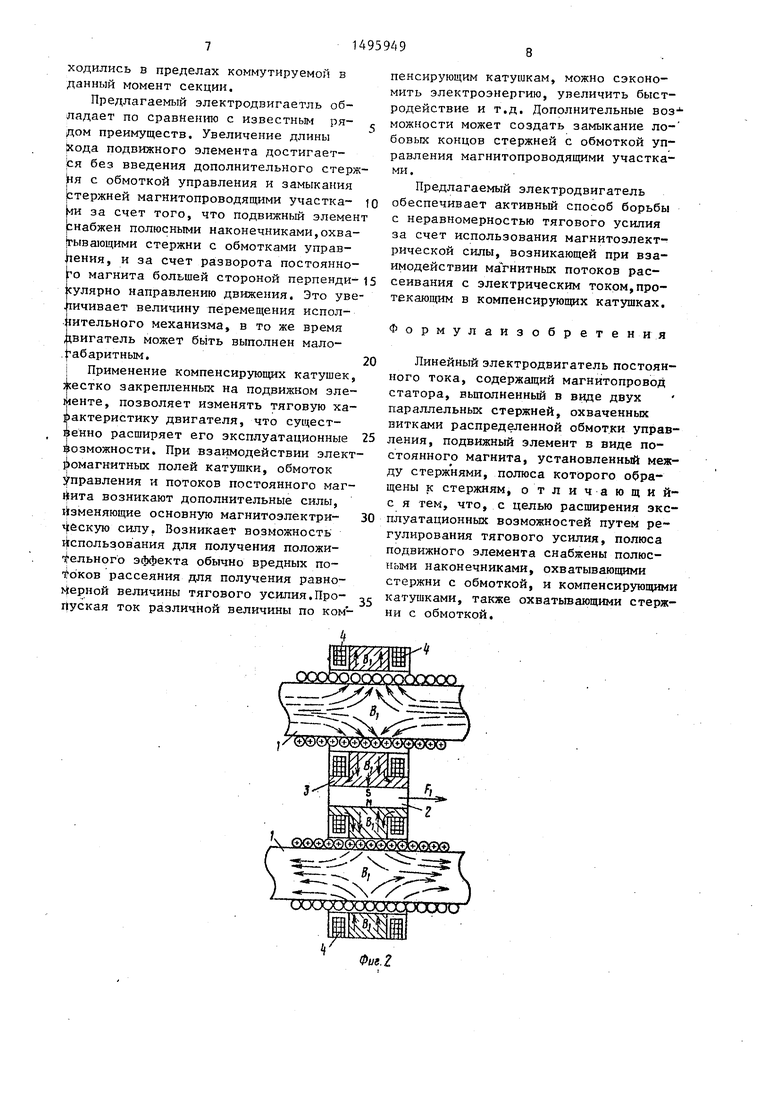
На фиг.1 представлен линейный электродвигатель постоянного тока, общий вид; на фиг.2 - схема пути основного потока В постоянного магнита и направление основной магнитоэлектри-15 ческой силы F при взаимодействии (магнитного потока постоянного магни- |Та с током обмоток управления на |фиг,3 - схемы путей магнитных потоков рассеивания В от обмоток управления 0 |и направления магнитоэлектрической
|силы;Г2, возникающей при взаимодейст- |« . . . ,
вии ЭТИХ потоков с электрическим тоПри протекании электрического тока в обмотках управления, расположенных на параллельных стержнях 1, возникает основная магнитоэлектрическая сила F, (фиг.2), равная
г R Т ff 1 1 -1 i -1
где В , - магнитная индукция в рабочем зазоре между полюсными нако- нечниками 3 и стержнями 1 с обмотками;
активная длина одного витка проводника (т.е. часть обмотки, находящаяся в рабочем зазоре)i
количество витков обмотки управления в рабочем зазоре, сила тока в проводнике обмотки.
В реальной конструкции величина .магнитной индукции В в зазоре состоит из магнитной индукции В, от по- стоянных магнитов и магнитной индукli W-, Т IKOM компенсирующих катушек на фиг.4- «ии .г созданн4ой магнитными потока- л,„ 2э jj рассеивания о т обмоток управления:
3 1 ± В J .
I схемы путей магнитных потоков В от Iкомпенсируюпщх катушек и направление :электромагнитной (соленоидной) си: ли ЕЗ.
Линейный электродвигатель постоян- ; ного тока состоит из двух параллель- . I ных стержней 1 с обмотками управления, i подвижного элемента, вьшолненного в I виде постоянного магнита 2 с полюсны- : МИ наконечниками 3 и компенсирующими : катушками 4. Полюсные наконечники 3, iS так же, как и кoмпeнcиp, ющиe катуш- ки 4, охватьшают параллельные стержни 1 .
Количество компенсирующих кату-, шек 4 монет быть любое: одна, две, 40 три и т.д. Постоянный магнит 2 в подвижном элементе установлен полюсами к параллб .льным стержням 1 и сориентирован меньшей стороной вдоль направления дви-кеиия. 45
Управляющая обмотка равномерно распределена на параллельных стержнях 1. Направление тока в обмотках должно быть одинаковым на прверхнос- ;. тях стержней 1, обращенных к постоянному магниту 2.
Исполнительный орган крепится к подвижному элементу. Компенсирующие катушки 4 жестко крепятся к по- гг люсным наконечникам 3,.
Линейньш электродвигатель постоянного тока работает следующим образом.
в.
Величина магнитных потоков рассеивания В имеет максимальное значение и противоположные знаки на концах обмоток управления и нулевое значение в середине.
Таким образом, величина индукции В j имеет минш-1альное значение в одном конце обмоток управления и максимальное в другом, что определяет соответствующее изменение тягового усилия.
При протекании электрического тока по обмоткам компенсирз ющих катушек 4 возникает дополнителйная магнитоэлектрическая сила (фиг.З), равная
F,
BaT.wj,,
где Bj - магнитная индукция потоков
рассеиванияJ
1 - сила тока в обмотке компенсирующей катушки, W - количество витков компенсирующей катушки,
1 - длина одного витка проводника компенсирующей катушки. Для получения равномерной тяговой характеристики направление тока в компенсирующих катушках 4 должно совпадать с направлением тока в обмотках управления, расположенных на параллельных стержнях 1.
При протекании электрического тока в обмотках управления, расположенных на параллельных стержнях 1, возникает основная магнитоэлектрическая сила F, (фиг.2), равная
г R Т ff 1 1 -1 i -1
где В , - магнитная индукция в рабочем зазоре между полюсными нако- нечниками 3 и стержнями 1 с обмотками;
активная длина одного витка проводника (т.е. часть обмотки, находящаяся в рабочем зазоре)i
количество витков обмотки управления в рабочем зазоре, сила тока в проводнике обмотки.
В реальной конструкции величина .магнитной индукции В в зазоре состоит из магнитной индукции В, от по- стоянных магнитов и магнитной индукli W-, Т созд еиван
в.
Величина магнитных потоков рассеивания В имеет максимальное значение и противоположные знаки на концах обмоток управления и нулевое значение в середине.
Таким образом, величина индукции В j имеет минш-1альное значение в одном конце обмоток управления и максимальное в другом, что определяет соответствующее изменение тягового усилия.
При протекании электрического тока по обмоткам компенсирз ющих катушек 4 возникает дополнителйная магнитоэлектрическая сила (фиг.З), равная
F,
BaT.wj,,
где Bj - магнитная индукция потоков
рассеиванияJ
1 - сила тока в обмотке компенсирующей катушки, W - количество витков компенсирующей катушки,
1 - длина одного витка проводника компенсирующей катушки. Для получения равномерной тяговой характеристики направление тока в компенсирующих катушках 4 должно совпадать с направлением тока в обмотках управления, расположенных на параллельных стержнях 1.
Зная, что действ тощая на подвижный элемент 2 составляющая основной силы F , сила F f, р , обусло вленная действием потоков -рассеивания, равна:
т + KTWl п.р г 1 .
Для получения равномерной тяговой характеристики значение тока I в обмотках компенсируюпщх катушек 4 равно
т . w,-i
п.р
правление на противоположное при прохождении подвижного элемента через середину параллельных стержней 1 с обмотками управления, то в начале пути Т прибавляется к F, а в конце вычитается.
Компенсирующие катушки максимально приближены к рабочему зазору. Поэтому значение потоков рассеивания, проходящих через рабочий зазор и компенсирующие катушки 4, примерно одинаково. Таким образом, потоки рассеивания, уменьшая основную магнитоэлектрическу силу F, в то же время создают дополнительную магнитоэлектрическую силу F.
Задавая ток в обмотке компенсирующей катушки 4
Ii W, 1,
;
Vi
можно менять тяговую характеристику..
Наибольшую величину электромагнитная (соленоидная) сила Fj имеет при полностью разомкнутых стержнях 1, а . по характеру действия аналогична магнитоэлектрической силе F.
Величину Fj определяют из закона сохранения энергии и из рассмотрения
энергетического баланса
oCl f d Ч
з . о
где (l,q) величина потокосцепления катушки, Ij - ток катуШки, q - обобщенная координата, определяющая положение катушки.
Используя соленоидную силу в конструкции с разомкнутыми параллельными стержнями 1, в компенсирующие катушки 4 можно подавать ток
т . I г -.Т
Ч-Ч
Это позволяет экономить электроэнергию. Поскольку соленоидная сила Fj по действию аналогична магнитоэлектрической силе Fj, то соленоидная сила Fj} позволяет увеличить тяговое усилие от начала обмотки управления до середины и уменьшить от середины до конца.
Для ликвидации соленоидной c шы F- достаточно замкнуть магнитопроводами концы параллельных стержней 1 с общих сторон. Для того чтобы соленоидная сила действовала только в одном ка- правлении, необходимо замкнуть магнитопроводами только два конца магнито- проводящих стержней.
Таким образом, используя магнитоэлектрическую силу Fj и соленоидную
силу F можно изменять тяговую характеристику двигателя.
Для увеличения быстродействия двигателей и ликвидации ударов в конце движения необходимо форсировать тяговое усилие в начале движения и уменьшить в конце. Это достигается за счёт подачи на компенсирующие катушки 4 тока
30
I,, .
Wjl t
0
5
0
5
Количество компенсирующих катушек и их размещение может быть любым, Так, например, для получения равно- 2 мерной характеристики более рационально задействовать правую катушку 4 (группу катушек) при движении подвижного элемента влево и левую при движении вправо. Такое подключение катушек позволяет использовать наибольшую прибавку силы в начале движения и наименьшее ее уменьшение в конце.
При этом необходимо учитывать направление потоков рассеивания от компенсирующих катушек 4 и подключать или располагать их на тех стержнях 1, где потоки рассеивания от компенсирующих катушек 4 совпадают по направлению с магнитными потоками от по- стоянного магнита. Таким образом, дополнительно увеличена магнитная индукция в рабочем зазоре.
Предлагаемое техническое решение может быть осуществлено как при запит- ке всей управляющей обмотки, так и при секционной коммутации. При секционном выполнении двигателя необходимо, чтобы компенсирукодие катушки на
ходились в пределах коммутируемой в данный момент секции.
Предлагаемый электродвигаетль обладает по сравненню с известным рядом преимуществ. Увеличение длины хода подвижного элемента достигается без введения дополнительного стерж Ия с обмоткой управления и замыкания стержней магнитопроводящими участка- за счет того, что подвижный элемен |снабжен полюсными наконечниками,охва- |гыва1ощими стержни с обмотками управ- Ьения, и за счет разворота постоянно- о магнита большей стороной перпенди | :улярно направлению движения. Это уве |1ичивает величину перемещения испол- ительНого механизма, в то же время |(вигатель может быть выполнен мало- фабаритным,
j Применение компенсирующих катушек, естко закрепленных на подвижном эле- ijieHTe, позволяет изменять тяговую характеристику двигателя, что существенно расширяет его эксплуатационные возможности. При взаимодействии электромагнитных полей катушки, обмоток правления и потоков постоянного маг- возникают дополнительные силы, изменяющие основную магнитоэлектрическую силу. Возникает возможность 1 спольз1ования для получения положи- ельного эффекта обычно вредных по- рассеяния для получения равно- Мерной величины тягового усилия,Про
пуская ток различной величины по ком,vv
5 0
5 30
35
пенсирующим катушкам, можно сэкономить электроэнергию, увеличить быстродействие и т,д. Дополнительные воз- можности может создать замыкание ло- бовых концов стержней с обмоткой управления магнитопроводящими участками.
Предлагаемый электродвигатель обеспечивает активный способ борьбы с неравномерностью тягового усилия за счет использования магнитоэлект- рической силы, возникающей при взаимодействии ма гнитных потоков рассеивания с электрическим током,протекающим в компенсирующих катушках,
Формулаизобретения
Линейный электродвигатель постоянного тока, содержащий магнитопровод статора, выполненный в виде двух параллельных стержней, охваченных нитками распределенной обмотки управления, подвижный элемент в виде постоянного магнита, установленный между стержнями, полюса которого обращены к стержням, отличающий- с я тем, что, с целью расширения эксплуатационных возможностей путем регулирования тягового усилия, полюса подвижного элемента снабжены полюсными наконечниками, охватывающими стержни с обмоткой, и компенсирующими катушками, также охватывающими стержни с обмоткой.
Фиг.2
/
ек :о :о:о:о:«хо:о:ет
Фие.З
s:i:i b.x:ii.S5
Фи&
| Линейный электродвигатель постоянного тока | 1983 |
|
SU1188833A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
