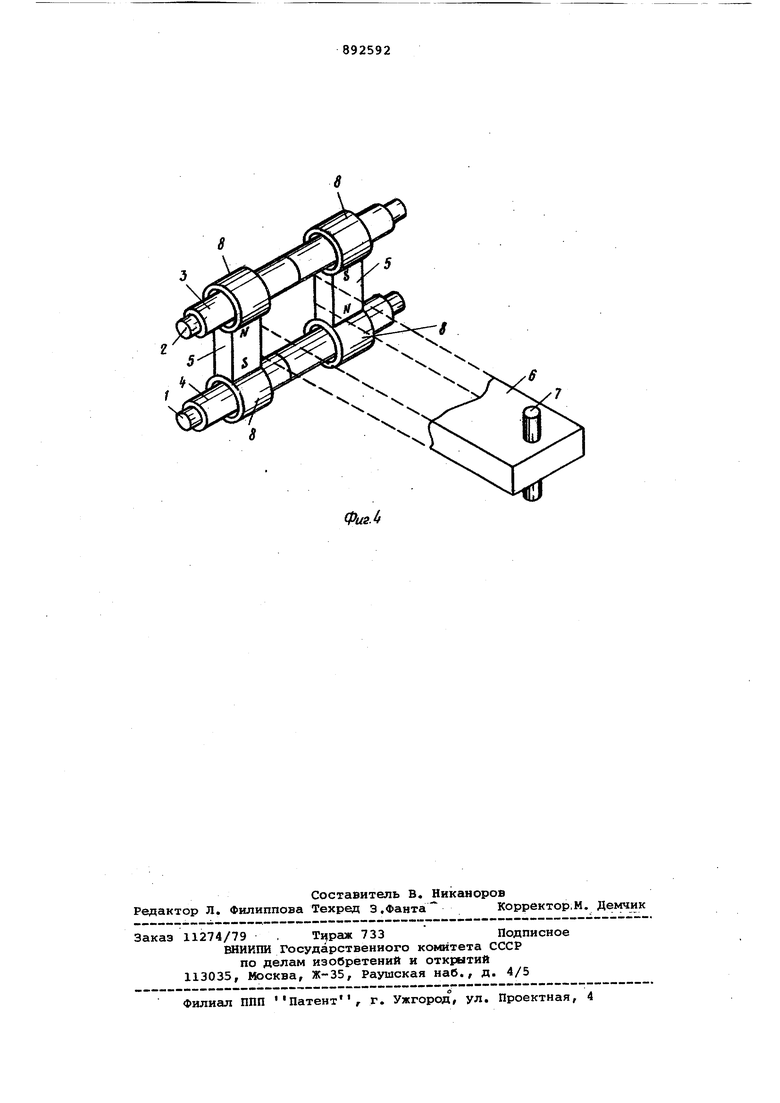
Изобретение относится к специальным электрическим машинам, конкретно к моментным устройствам постоянного тока с ограниченным углом поворота выходной оси. Магнитоэлектрические датчики моме тов (ДМ) отличаются простотой и нахо дят применение в измерительных прибо рах, использующих принцип компенсации измеряемых сил и моментов, в гироскопических системах и других областях техники 1. Известны магнитоэлектрические дат чики момента, содержащие магнитную систему с постоянн1лм магнитом и размещенную на металлическом каркасе обмотку управления 2. Наиболее близким по технической сущности к предлагаемому является магнитоэлектрический датчик момента с ограниченным углом поворота выходной оси, содержащий статор с магнито проводом и распределенными по кольцевыми обмотками, и ротор, выполненный на постоянных магнитах. Равномерно распределенные витки статорной обмотки образуют две секци каждая из которых занимает половину .окружности кольцевого магничопровада внутри которого находится намагничен ный в радиальном направлении магнит ротора. Вследствие независимости магнитного сопротивления и потокосцепления от углового положения магнита датчик развивает момент, пропорционсшьный току обмоток в рабочем угле, немного меньшем ± . Недостатком этого датчика является отсутствие в нем позиционного момента, создакяцего отрицательную жесткость подвеса. Вследствие этого при увеличении угла поворота датчика возрастает потребление электроэнергии, расходуемой на компенсацикг упругости подвеса. Недостатком датчика является также большое значение магнитной системы, приходящиеся на единицу создаваемого момента. Цель изобретения - увеличение удельного момента. Поставленная цеЛь достигается тем, что магнитопровод выполнен в виде двух параллельно расположенных частей, между которьии размещен магнит, связанный при помощи д«чага с выходной осью. Между концами частей магнитопровода могут быть установлены ферромагнитные перемлчки, которые могут быть снабжены подвижными магнитными шунтами. При этом магнит может быть . снабжен полюсныминаконечниками, охватывающими параллельно расположенные части магнитопровода, Кроме того, между двумя параллельно расположенными частями магнитопровода может быть помещен дополнительный магнит с противоположным основному магниту на правлением намагниченности, связан«ый с помощью рычага с выходной осью. На фиг. 1 изображен датчик с плоским магнитопроводом и магнитом; на фиг. 2 - датчик с полюсными наконечниками; на фиг. 3 - датчик с плоским магнитопроводом, между параллельно расположенными частями которого размещены два магнита; на фиг. 4 датчик с полюсными наконечниками, . частично или полностью охватывающими магнитопровод.
Датчик содержит параллельно расположенные части магнитопровода 1 и 2 с концевыми перемычками, распределенные обмотки (катушки) 3 и 4 статора, магнит 5 ротора, намагниченный в осевом направлении, рычаг б, ось 7 вращегния. В качестве рычага б можно использовать достаточно удаленные от оси 7 вращения детали устройства, к которому прилагается момент датчика. Датчик с полюсными наконечниками 8 (фиг.2) снабжен, кроме того, концевыми поворотными перемычками 9 и 10. В датчике с плоским магнитопроводом (фиг. 3) секции статорных обмоток 3 и 4 снабжены выводами от средних токов . ;i
Сила, действующая в датчике, определяется по формуле
F В & I W , где В - индукция в рабочем зазоре
(Т); С - активная длина проводника
(м) ; 1 - сила тока в обмотке якоря
датчика (А); W - число витков в катушке 3 и
4 датчика;
F - электромагнитная;.сила взаимодействия проводника с током и поля ротора. Направление силы зависит от направления поля магнита 5 и направления тока в обмотке 3 и 4 датчика, При изменении полярности питающего обмотку 3 и 4- напряжения направление силы изменяется на противоположное. Обмотки 3 и 4 должны быть включены таким образом, чтобы момент, создаваемый обеими обмотками, совпадал. При совпадающем направлении намотки полярность. питакяцего обмотки 3 и 4 напряжения противоположна, а при противоположном направлении намотки она совпадает. Обмотки 3 и 4 можно соединять как последовательно, так и параллельно (в зависимости от напряжения источника питания, требования к технологиинамотки, надежности
и т. д,). Для создания электромагнитных усилий при одной и той же мощности питания обе схемы равноценны (хотя при последовательном типе соединений несколько лучше коэффициент заполнения, меди за счет увеличения ее сечения, однако надежность датчика ниже).
Особенностью предлагаемого магнитоэлектрического датчика момента является наличие концевых перемычек 9 и 10, замыкающих основной поток и поток обмоток 3 и 4 таким образом, что одна часть магнитопровода 1 и 2 находится при суммарном потоке, а другая - при разностном. При этом, если магнит 5 под действием электромагнитных сил сдвигается, например вправо (фиг. 1), то дополнительно к электромагнитным силам добавляются силы от магнитной асимметрии за счет увеличения основного потока (правого края) и его уменьшения с другого края (хотя суммарный поток ротора остается примерно постоянным). Эта дополнительная составляющая сила (сила тяжения), действующая на ротор (обычно подвижной частью является индуктор), компенсирует упругие силы, приложенные к оси ротора, что необходимо для увеличения точности отработки датчиком требуемых усилий, а также для уменьшения потребления электроэнергии расходуемой на компенсацию упругости подвеса. Поток якоря не зависит от положения индуктора.
Увеличивакнцийся поток индуктора, создает дополнительное усилие (позиционная составляющая этого усилия эквивалентна отрицательной жесткости). Эти силы противоположны по знаку упругим силам, приложенным к оси 7 датчика, компенсируя их частично или полностью. Магнитные силы тяжения, существующие независимо от того, включены обмотки 3 и 4 или нет, определяются только положением магнита 5 и могут быть меньше или равны упругим силам, действующим на ось 7.
В измерительной технике часто возникают задачи уменьшить или ликвидировать позиционную связь, возникающую при действии упругих сил, увеличив тем самым точностные характернее тики прибора. С этой целью введены концевые перемычки 9 и 10, которые и создают позиционную составляющую дополнительного усилия (противоположного знака с упругими силами), которые частично и полностью компенсируют эти силы. Так как в рабочем состоянии (обмотки 3 и 4 под током) моментный датчик по сигналам извне обеспечивает равенство моментов (или сил) входных и отрабатывакнцих, то такое создание дополнительного позиционного момента на только увеличивает точность прибора за счет компенсации упругих моментоб, но и уменьшает общий потребляемый датчиком ток, улучшая его ко эффициент преобразования. Нескомпен сированная часть упругих моментов отрабатывается за счет сигнала упра ления, поступающего на обмотки 3 и причем ток управления возрастает до тех пор, пока не наступит равновеси между внешним и отрабатываемым датчиком моментами. Разница в принципе действия датч ка (фиг. 2) заключается в том, что поток пронизывает все витки обмоток |3 и 4 якоря, в то время как поток (фиг. 1) пронизывает только витки, обращенные к полюсам магнита 5, так как витки, расположенные выше или н же магнитопровода 1 и 2 им экраниру ются и не участвуют в образовании электромагнитного момента, снижая этим коэффициент использования датчика (отнсияение момента к потребляемой мощности), кроме того, увеличиваются вес и габариты ДМ. Для уменьшения весогабаритных показателей и увеличения коэффициента использования датчика (фиг.2 и 4) использовались полюсные наконечники 8, охватывающие магнитопроводы 1 и 2 статора. Перемычки 9 и 10 существуют для замыкания потока ротора и потока ста тора. Угол поворота полюсных наконеч ников 8 относительно обмоток 3 и 4 ограничивается требованиями к датчику и может быть спроектирован в пределах от минимально возможного (510 эл. град.) до максимально возможного (300-320 эл. град.). Датчики (фиг. 3 и 4) отличаются от предыдущих (фиг. 1 и 2) тем, что путь основного потока индуктора проходит через два магнита 5, включенны в магн.итную цепь последовательно, создакицих общий суммарный поток. Для создания силы схема соединений катушек 3 и 4 (последовательно, параллельно, последоват.ельно-параллельно) может быть любой, количество магнитов 5 выбирается исходя из необходимого угла поворота и cyivH iapHoro момента, для чего необходимо увеличить число электромагнитных датчиков, замкнув магнитрпровсды 1 и 2 в два аргшлельно расположенных тороида (при ограничении габаритов).Если нет жесткого ограничения габаритов, то выгоднее применять не круговой, а сегментный вариант (фиг. 1-4) . Подвижные магнитные шунты - поворотные перемычки 9 и 10 могут быть конструктивно выполнены по-разному (в зависимости от требований к конкретному датчику). Обычно бывают заданы величина и характер изменения упругих сил на валу датчика, требование к точности установки и компенсацииэтих сил, величина и характер нагрузки на валу, климатические и механические факторы и др. Концевые перемычки 9 и 10 должны быть сделаны подвижными с возможностью фиксации в определенном положении (упором, винтом и др. средствами) ,; при этом при повороте должна изменяться проводимость между перемычкой и остальным магнитопроводом 1 и 2 статора, а также проводимость между пере№лчкой 9 и 10 и подвижными магнитами 5 ротора, что решается за счет эксцентричного закрепления перемычки 9 и 10 на магнитопроводе 1 и 2 статора. Магнитные шунты должны быть установлены таким образом, чтобы они замыкали потоки, идущее от индуктора, а также при повороте давгши бы изменение магнитной проводимости между перемычкой 9 и 10 магнитопроводом 1 и 2 статора и магнитом 5 ротора. Момент датчика пропорционален расстоянию от оси 7 вращения при постоянном весе магнитной системы. При отклонении магнита 5 относительно статора от среднего положения увеличивается магнитный поток, замыкающийся через одну онцевую перемычку, и уменьшается поток, замыкающийся через другую перемычку, возникают силы тяжения, направленные вСторону ближайшей перекЕЯЧки. Эти силы противоположны по знаку, упругим силам, приложенным к оси 7, и полностью или частично их компенсируют. Величину момента сил тяжения можно регулировать изменением до оси вращения, а также за счет установки нескольких датчиков, имеющих общую ось вращения. Точную регулировку отрицательной жесткости целесообразно производить изменением . геометрии и магнитного сопротивления перемычек. Магнитный поток, создаваемый двумя последовательно включенными магнитами 5 (фиг.З), проходит через воздушные зазоры и замыкается по обеим частям магнитопровсда. Поворот магнитов 5 вдоль магнитопровода 1 и 2 в пределах полусекций не вызывает изменения магнитного сопротивления и потокосцепления., поэтому развиваемый момент линейным образом зависит от тока управления. Величина развиваемого момента пропорциональна расстоянию до оси вращения 7 при неизменном весе магнитной системы. Недостатком датчика (фиг. 3) является неполное использование меди обмоток. Этот недостаток устраняется применением полюсных наконечников 8, частично или полностью охватывающих магнитопровод 1 и 2. . Предлагаемый датчик целесообразно , использовать, в случаях, когда требуется значительная величина момента и допустимо большое плечо его приложения. При заданных габаритных размерах увеличение развиваемого момента достигается путем параллельного включения нескольких датчиков так, чтобы их магнитопроводы служили продолжением друг друга вплоть до замыкания их в два параллельно расположенные кольца. Преимущество изобретения состоит в наличии позиционного момента, приложенного к оси .датчика, а также в низком значении веса магнитной систе мы/ приходящегося на единицу развиваемого момента. формула изобретения I. Магнитоэлектрический датчик мсялента с ограниченным углом поворо та выходной оси, содержащий статор, с магнитопрйводом и распределенными на нем кольцевыми обмотками, и ротор, выполненный на постоянных магнитсьх, о т л и ч а ю щ и и с я тем, что, с целью увеличения удельного момента, магнитопровод выполнен в в де дйух параллельно расположенных частей, между которыми размещен маг нит, связанный при помсяци рычага с выходной осью. 2. по п. 1, отличаю щийся тем, что, с целью снижени энергопотребления за счет, получения отрицательной жесткости, на концах магнитопровода установлены ферромагнитные перемычки. 3.Датчик по п. 1, отличающийся тем, что, с целью регулирования отрицательной жесткости, концевые перемычки снабжены подвижными магнитными шунтагли. 4.Датчик по п. 1, отличающийся тем, что магнит снабжен полюсными наконечниками, охватывеиощими параллельно расположенные части магнитопровода. 5.Датчик по п. 1, о т л и ч а ющ и и с я тем, что между параллельно расположенными частями магнитопровода помещен дополнительный магнит с противоположным основному магниту направлением намагниченности и связан с помсяцью рлчага с выходной осью. Источники информации, принятые во внимание при экспертизе 1. Тирископические систели. Под ред. Пельнора Д.С. М., Высшая школа, 1972, 4.V3, § 16. 2. Авторское свидетельство СССР 263226, кл. Н 02 К 26/00, 1968. 3. Куликовский Л.Ф. и Заринов М.Ф. Индуктивные преобразователи перемещения с распределенными параметрами. М.-Л., Энергия, 1966, с. 70, рис. 2,18.



| название | год | авторы | номер документа |
|---|---|---|---|
| Моментный двигатель постоянного тока | 1979 |
|
SU828329A1 |
| Линейный электродвигатель постоянного тока | 1987 |
|
SU1495949A1 |
| Поворотный трансформаторный преобразователь | 1979 |
|
SU855751A1 |
| Магнитоэлектрический преобразователь | 1979 |
|
SU836732A1 |
| МАГНИТНАЯ СИСТЕМА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2012 |
|
RU2505784C2 |
| Устройство для измерения силы натяжения ленты | 1980 |
|
SU861990A1 |
| Синхронный бесконтактный генератор | 1973 |
|
SU575735A1 |
| МОМЕНТНЫЙ ДВИГАТЕЛЬ | 2010 |
|
RU2441310C1 |
| Устройство для измерения крутящего момента | 1977 |
|
SU708183A1 |
| МОДУЛЬНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ (МВЭП) | 2006 |
|
RU2310966C1 |