20
11
1i11
I t23 со |
| название | год | авторы | номер документа |
|---|---|---|---|
| Мускульный привод транспортного средства | 1989 |
|
SU1736824A2 |
| СПОСОБ ДВУХРЕЖИМНОГО ПЕДАЛИРОВАНИЯ БИОТРАНСПОРТА И КАРЕТОЧНЫЙ УЗЕЛ БИОТРАНСПОРТА "МАКСИ-7" | 1994 |
|
RU2094289C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
| ВЕЛОСИПЕД РИКАМБЕНТ С ЛИНЕЙНЫМ ПРИВОДОМ | 2010 |
|
RU2449914C1 |
| Ножной воздушный насос Ожева | 2019 |
|
RU2765049C2 |
| МУСКУЛОЛЕТ (ВАРИАНТЫ) | 2022 |
|
RU2786028C1 |
| ПЕДАЛЬНЫЙ ПРИВОД | 1992 |
|
RU2068364C1 |
| Кулисно-рычажный прямолинейно-направляющий механизм повышенной точности и привод для колесных транспортных средств, приводимых в движение мускульной силой человека | 2017 |
|
RU2664852C1 |
| КАРЕТКА ВЕЛОСИПЕДА | 2011 |
|
RU2476345C2 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2011 |
|
RU2493999C2 |
Изобретение относится к безрельсовым наземным транспортным средствам, в частности, к устройствам для приведения в действие колесных транспортных средств мускульной силой человека, и может быть использовано в индивидуальных транспортных средствах с несколькими приводными устройствами, например в велосипедах типа "Тандем", или с единичным приводом. Цель изобретения - повышение эффективности работы привода путем перекрытия мертвых точек в траекториях перемещения педалей. Предлагаемый привод содержит раму 1, где на опорах 2 установлены валы 3, на которых закреплены попарно кривошипы 5,6 и 7,8. Валы 3 и 4 связаны с ведущим колесом цепной передачей, включающей звездочку 9, закрепленную на валу 3, ведущую звездочку 10, закрепленную на валу 4, ведомую звездочку 11 и охватывающую их бесконечную цепь 12. С односторонними кривошипами 5 и 7 соединены шарнирно шатуны 13 и 14, также шарнирно соединенные между собой. Односторонние кривошипы 6 и 8 соединены шатунами 15 и 16. На осях шарнирных соединений шатунов установлены педали 17 и 18. Пары кривошипов 5 и 6 сдвинуты относительно пары кривошипов 7 и 8 на угол А. 2 з.п.ф-лы, 11 ил.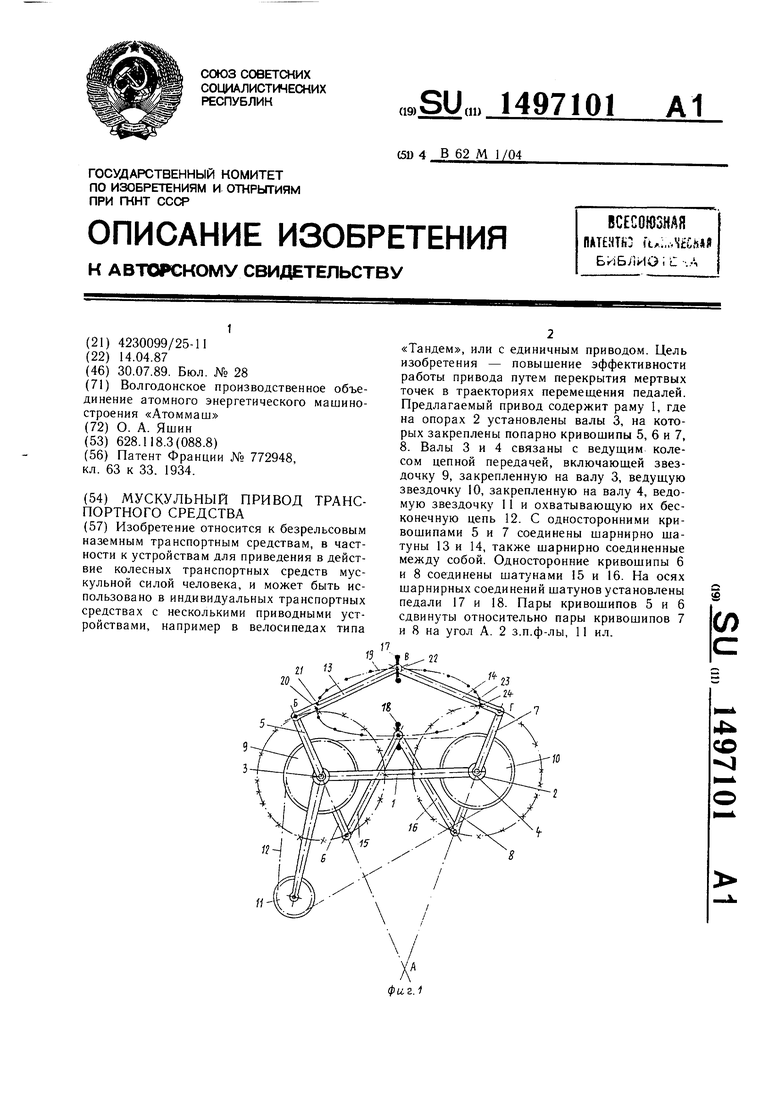
(
фиг.)
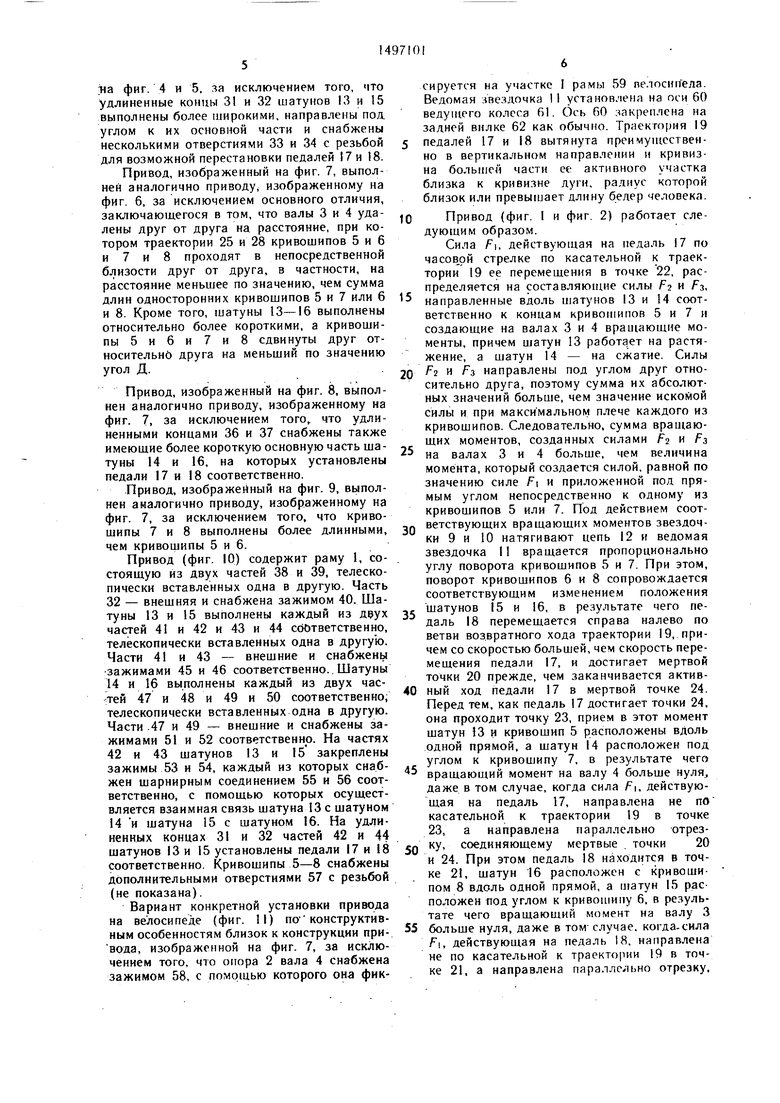
Изобретение относится к транспортным средствам, приводимым в движение мускульной силой человека, в частности к приводам велосипедов и веломобилей.
Цель изобретения - повышение эффективности работы привода путем перекрытия мертвых точек в траекториях перемещения педалей.
На фиг. 1 изображен предлагаемый привод, шатуны которого выполнены одинаковыми по длине, причем кривошипы одного вала наклонены симметрично относительно кривошипов другого вала, вид сбоку; на фиг. 2 - то же, при расположении педалей в активной части их траектории; на фиг. 3 - то же, с меньшим значением угла между симметрично наклоненными кривошипами; на фиг. 4 - то же, шатуны которого выполнены с разной длиной, более .алинные нз которых снабжены удлиненными концами; на фиг. 5 - то же, с разной длиной шатунов при расположении педалей в активной части их траектории; на фиг. 6 - то же, с изогнутыми удлиненными концами шатунов; на фиг. 7 - то же, расстояние между валами кривошипов в котором имеет значение меньшее, чем сумма длин двух односторонних кривошипов; на фиг. 8 - то же, где обе пары шатунов снабжены удлиненными концами, а расстояние между валами меньше, чем сумма длин двух односторонних кривошипов; на фиг. 9 - то же, где кривошипы одного из валов выполнены более длинными, чем кривошипы другого вала; на фиг. 10 - то же, с возможностью изменения раз.меров шатунов, кривошипов и расстояния между валами кривошипов; на фиг. 11- вариант конкретной установки привода на велосипеде.
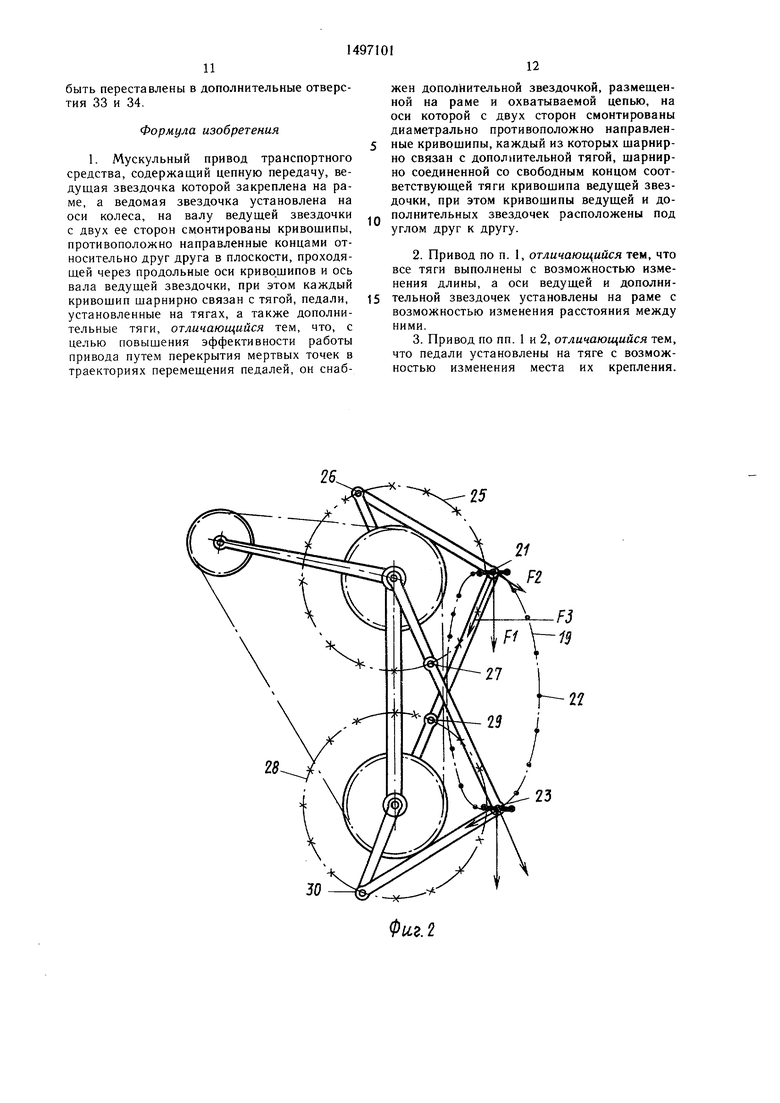
Привод (фиг. 1 и фиг. 2) содержит раму 1, где на опорах 2 установлены валы 3 и 4, на которых закреплены попарно кривошипы 5 и 6 и 7 и 8 соответственно. Валы 3 и 4 связаны с ведущим колесом цепной передачей, включающей в себя ведущую звездочку 9, закрепленную на валу 3, ведущую звездочку 10, закрепленную на валу 4, ведомую звездочку 11 и охватывающую их бесконечную цепь 12, причем звездочки 9 и 10 выполнены с одинаковым числом зубьев. С кривошипом 5 соединен шарнирмо направленный к нему под прямым угло.м А шатун 13, с кривошипом 7 - направленный к нему под прямым углом Б шатун 14, а с кривошипами 6 и 8 соединены шарнирно шатуны 15 и 16 соответственно. Шатун 13 соединен шарнирно с шатуном 14 н направлен к нему под углом В, а шатун 15 - с шатуном 16 и направлен к нему под углом Г, причем шатуны 13-16 выполнены одинаковыми по длине, а на осях их шарнирных соединений установлены педали 17 и 18 соответственно. Пары кривошипов 5 и 6 сдвинуты относительно пары кривошипов 7 и 8 против
часовой стрелки на угол, численно равный
углу Д, образованному путем пересечения
лучей проходящих вдоль их проекций.
Траектории 19 перемещения педалей 17 и
18 (траектории педалей при проецировании накладываются друг на друга) принадлежат точки 20-24. Точки 20 и 24 являются мертвыми по отношению к силе, направленной вдоль отрезка прямой, соединяющей их. Активная часть траектории 19 в направлении по часовой стрелке от точки 20 к точке 24 является ветвью рабочего хода, а далее - другая часть от точки 24 до точки 20 - ветвью возвратного хода. Точка 22 является средней в активной части траектории 19,
а точки 21 и 23 выделяют в ней интервал, соответствующий провороту кривошипов 5 и 7 или 6 и 8 на 180°, выделенному в траектории точки 25 вращения кривошипов 5 и 6 точками 26 и 27, а в траектории 28 вращения кривошипов 7 и 8 - точками 29 и 30 соответственно. При этом активная часть траектории 19 между точками 20 и 24 имеет длину того же порядка, что и части траекторий 25 и 28 концов кривошипов 5 и 6 и 7 и 8 между точками 26 и 27 и 29
и 30 соответственно.
Привод (фиг. 2) повернут на 90° и шатуны 13-16 показаны условно.
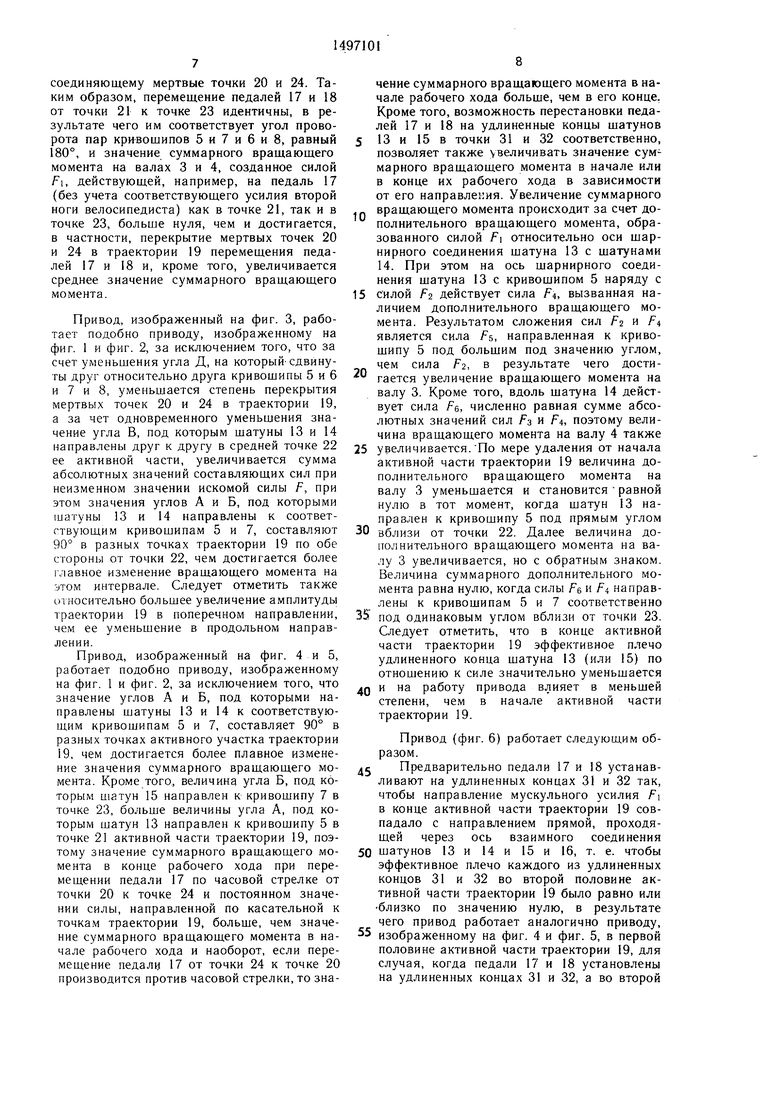
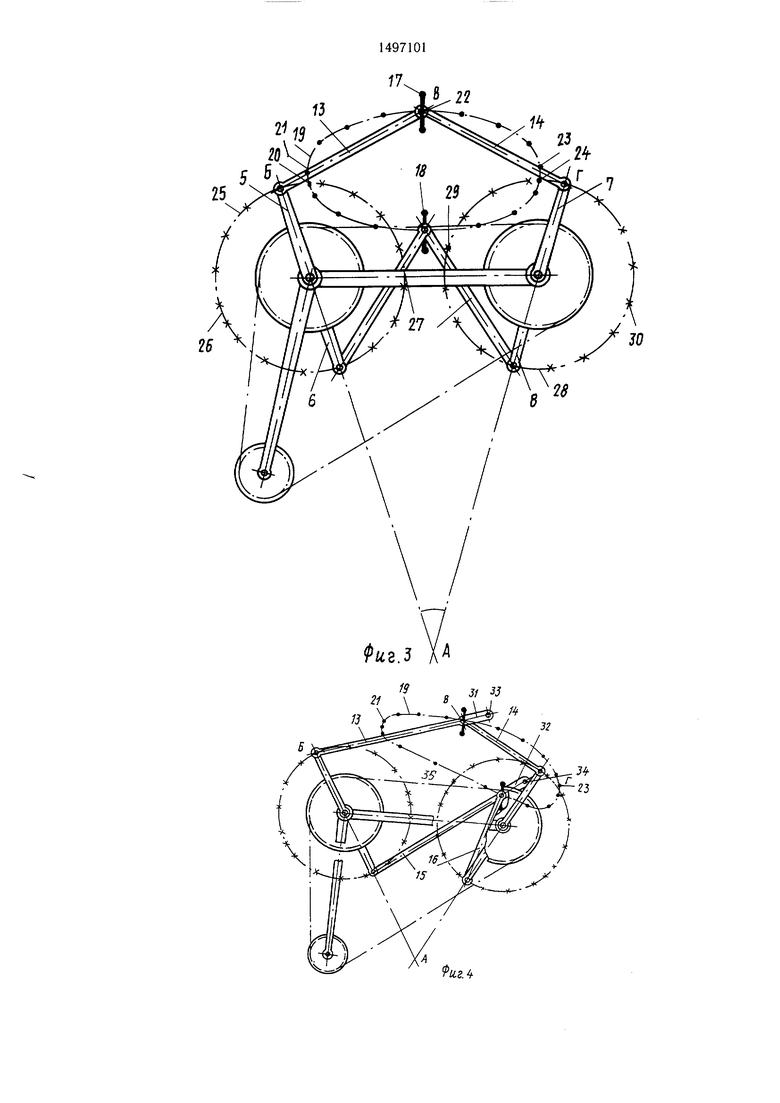
Привод, изображенный на фиг. 3, выполнен аналогично приводу, изображенному на фиг. 1 и фиг. 2, за исключением того, что пары кривошипов 5 и 6 и 7 и 8 сдвинуты друг относительно друга на меньший по значению угол Д. Соответственно уменьшена величина угла В, под которым шатун 13 направлен к шатуну 14 в средней точке 22 активной части траектории 19 н изменены величины углов А и Б, под которыми направлены шатуны 13 и 14 к соответствующим кривошипам 5 и 7.
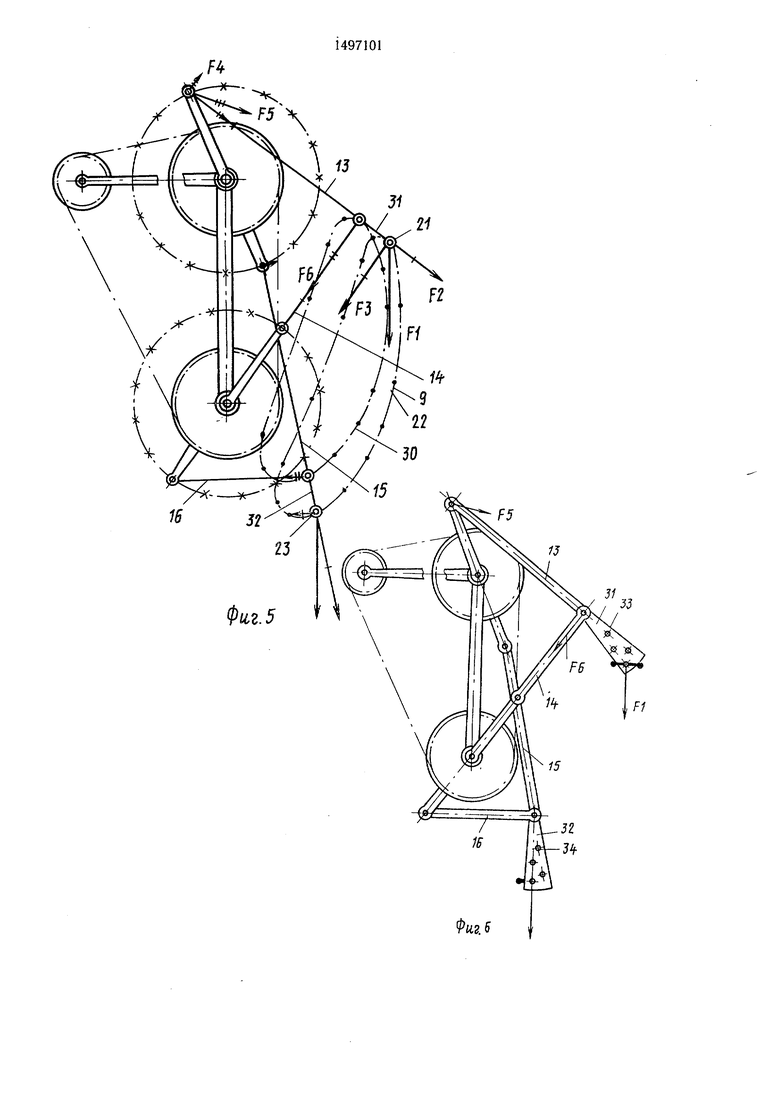
Привод, изображенный на с{зи1. 4 и фиг. 5, выполнен аналогично приводу, изображенному на фиг. 1 и фиг. 2; за исключением того, что его основным отличием является то, что шатуны 13 и 15 выполнены от оси их шарнирных соединений с кривошипами 5 и 6 до оси их шарнирных соединений с соответствующими шатунами 14 и 16 длиннее, чем шатуны 14 и 16, и с удлиненными концами 3 и 32, имеющими отверстия 33 н 34 с резьбой для возможной перестановки в них осей педалей 17 и 18 соответственно. Кроме того, пара кривоши- пов 5 и 6 сдвинута относительно пары кривошипов 7 и 8 на больший по значению угол Д. При этом поривод, изображенный на фиг. 5, повернут на 90°, шатуны 13 и 14 и 15 и 16 показаны услов- но. Для сопоставления с траекторией 19 показана также траектория 35 отверстий 33 и 34.
Привод, изображенный на фиг. 6, выполнен аналогично приводу, изображенному
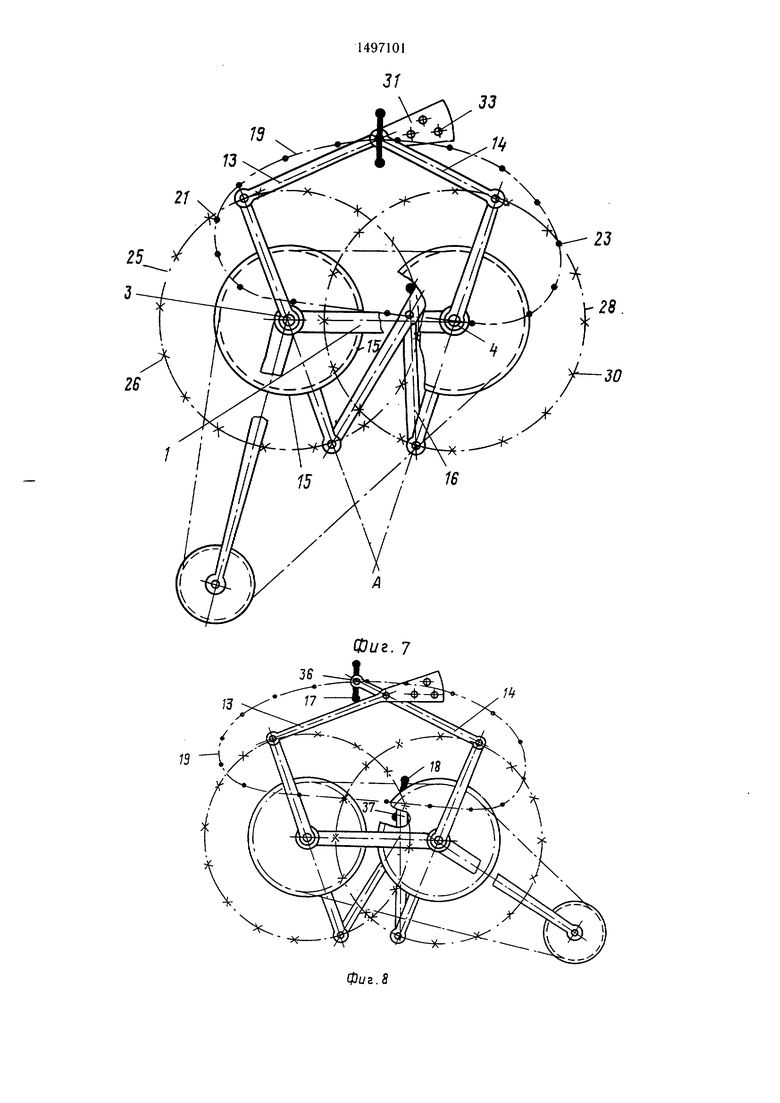
jHa фиг. 4 и 5. за исключением того, что удлиненные концы 31 н 32 шатунов 13 и 15 выполнены более широкими, направлены под. углом к их основной части и снабжены несколькими отверстиями 33 и 34 с резьбой для возможной перестановки педалей 17 и 18. Привод, изображенный на фиг. 7, выполнен аналогично приводу, изображенному на фиг. б, за исключением основного отличия, заключающегося в том, что валы 3 и 4 удалены друг от друга на расстояние, при котором траектории 25 и 28 кривошипов 5 и 6 и 7 и 8 проходят в непосредственной близости друг от друга, в частности, на расстояние меньшее по значению, чем сумма длин односторонних кривошипов 5 и 7 или 6 и 8. Кроме того, шатуны 13-16 выполнены относительно более короткими, а кривошипы 5и6и7и8 сдвинуты друг относительно друга на меньший по значению угол Д.
Привод, изображенный на фиг. 8, выполнен аналогично приводу, изображенному на фиг. 7, за исключением того, что удлиненными концами 36 и 37 снабжены также имеющие более короткую основную часть шатуны 14 и 16, на которых установлены педали 17 и 18 соответственно.
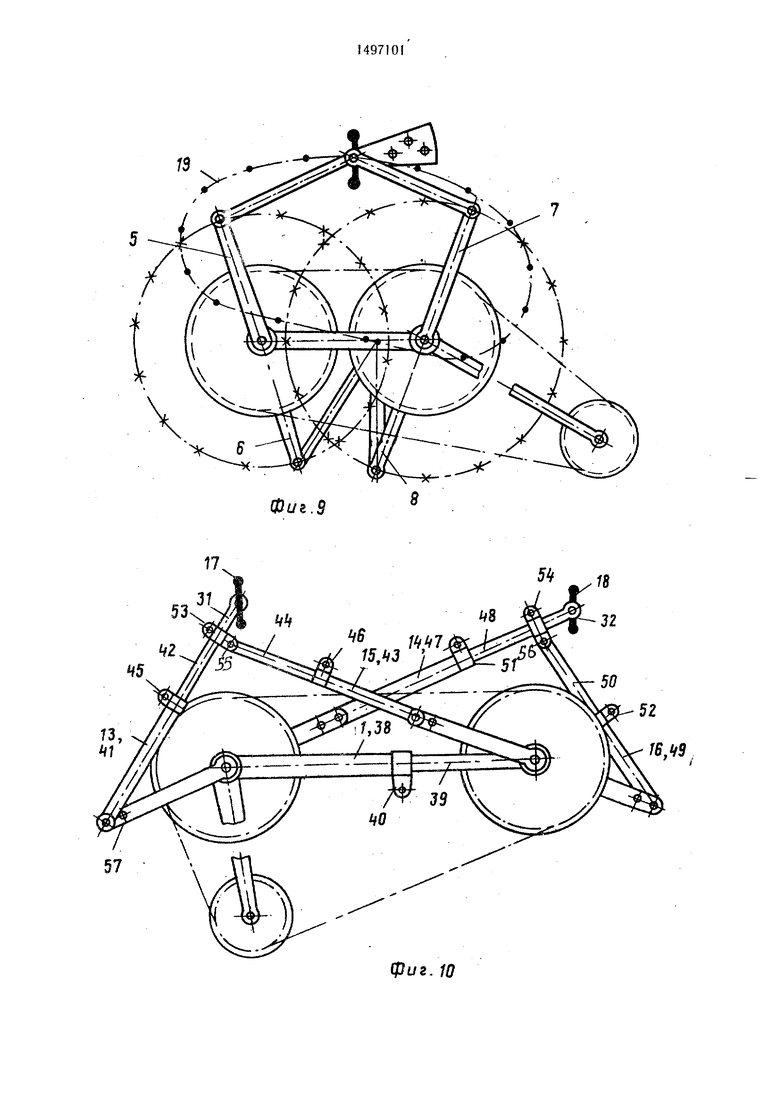
Привод, изображенный на фиг. 9, выполнен аналогично приводу, изображенному на фиг. 7, за исключением того, что кривошипы 7 и 8 выполнены более длинными, чем кривошипы 5 и 6.
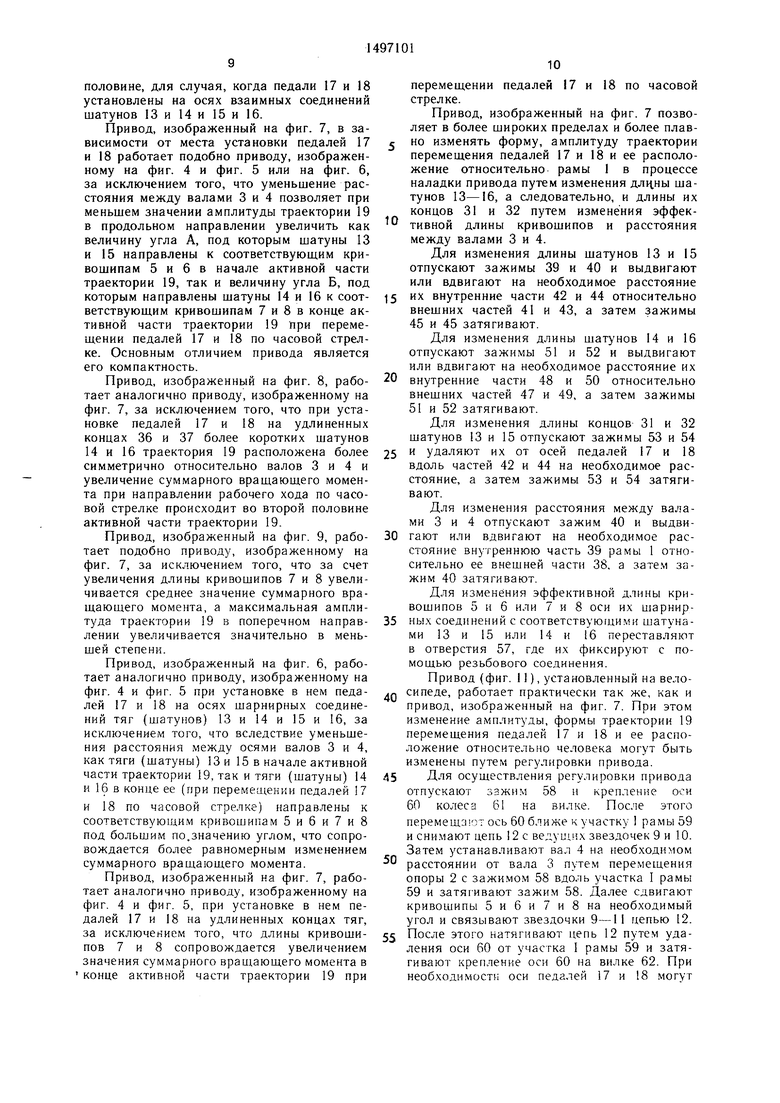
Привод (фиг. 10) содержит раму 1, состоящую из двух частей 38 и 39, телескопически вставленных одна в другую. Часть 32 - внешняя и снабжена зажимом 40. Шатуны 13 и 15 выполнены каждый из частей 41 и 42 и 43 и 44 соответственно, телескопически вставленных одна в другую. Части 41 и 43 - внешние и снабжены зажимами 45 и 46 соответственно., Шатуны 14 и 16 выполнены каждый из двух частей 47 и 48 и 49 и 50 соответственно, телескопически вставленных одна в другую. Части .47 и 49 - внешние и снабжены зажимами 51 и 52 соответственно. На частях 42 и 43 шатунов 13 и 15 закреплены зажимы 53 и 54, каждый из которых снабжен шарнирным соединением 55 и 56 соответственно, с помощью которых осуществляется взаимная связь шатуна 13 с щатуиом 14 и шатуна 15 с шатуном 16. На удлиненных концах 31 и 32 частей 42 и 44 шатунов 13 и 15 установлены педали 17 и 18 соответственно. Кривошипы 5-8 снабжены дополнительными отверстиями 57 с резьбой (не показана).
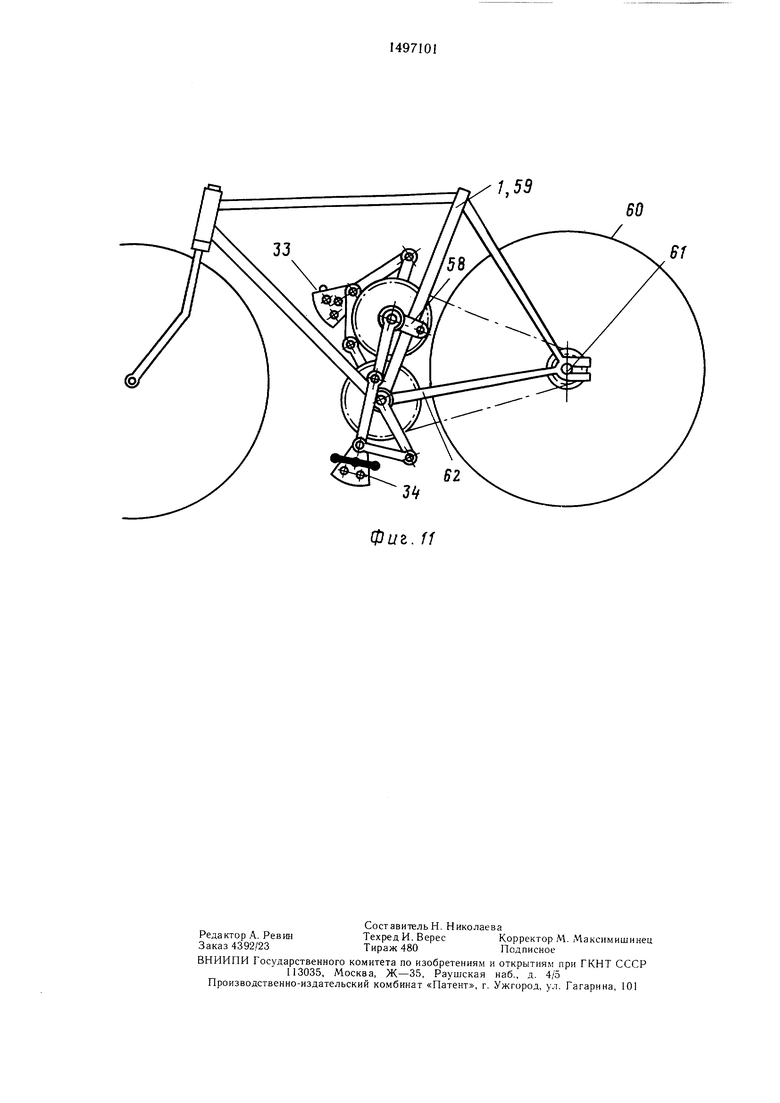
Вариант конкретной установки привода на велосипеде (фиг. 11) по конструктивным особенностям близок к конструкции при- вода, изображенной на фиг. 7, за исключением того, что опора 2 вала 4 снабжена зажимом 58, с помощью которого она фиксируется на участке I ра.мы 59 пелосигГела. Ведомая звездочка I 1 установлена на оси 60 ведущего колеса 61. Ось 60 закреплена на задней вилке 62 как обычно. Траектория 19 педалей 17 и 18 вытянута преимуп1ествен- но в вертикальном направлении н кривизна большей части ее активного участка близка к кривизне дуги, радиус которой близок или превышает длину бедер человека.
Привод (фиг. I и фиг. 2) работает следующим образом.
Сила Ft, действующая на педаль 17 по часовой стрелке по касательной к траектории 19 ее перемещения в точке 22, распределяется на составляюпхие силы F и fs,
направленные вдоль шатунов 13 и 14 соответственно к концам кривошипов 5 и 7 и создающие на валах 3 н 4 вращающие моменты, причем щатун 13 работает на растяжение, а шатун 14 - на сжатие. Силы
2 и 3 направлены под углом друг относительно друга, поэтому сумма их абсолютных значений больше, чем значение искомой силы и при максимальном плече каждого нз кривошипов. Следовательно, сумма вращающих моментов, созданных силами 2 и Fi
на валах 3 и 4 больше, чем величина момента, который создается силой, равной по значению силе F и приложенной под прямым углом непосредственно к одному из кривошипов 5 или 7. Под действием соответствующнх вращающих моментов звездочки 9 и 10 натягивают цепь 12 и ведомая звездочка I вращается пропорционально углу поворота кривошипов 5 и 7. При этом, поворот кривошипов 6 и 8 сопровождается соответствующим изменением положения
шатунов 15 и 16, в результате чего педаль 18 перемещается справа налево по ветви возвратного хода траектории 19,.причем со скоростью большей, чем скорость перемещения педали 17, и достигает мертвой точки 20 прежде, чем заканчивается активный ход педали 17 в мертвой точке 24. Перед тем, как педаль 17 достигает точки 24, она проходит точку 23, прием в этот момент шатун 13 и кривошип 5 расположены вдоль одной прямой, а шатун 14 расположен под углом к кривошипу 7, в результате чего
вращающий момент на валу 4 больше нуля, даже в том случае, когда сила F, действующая на педаль 17, направлена не пО касательной к траектории 19 в точке 23, а направлена параллельно отрезку, соединяющему мертвые точки 20 н 24. При этом педаль 18 находится в точке 21, шатун 16 расположен с кривошипом 8 вдоль одной прямой, а шатун 15 расположен под углом к кривошипу 6. в результате чего вращающий момент на валу 3
больше нуля, даже в том случае, когда-сила FI, действующая на педаль 18, направлена не по касательной к траектории 19 в точке 21, а направлена параллельно отрезку.
соединяющему мертвые точки 20 и 24. Таким образом, перемещение педалей 17 и 18 от точки 21 к точке 23 идентичны, в результате чего им соответствует угол прово- рота пар кривошипов 5 и 7 и 6 и 8, равный 180°, и значение суммарного вращающего момента на валах 3 и 4, созданное силой F, действующей, например, на педаль 17 (без учета соответствующего усилия второй ноги велосипедиста) как в точке 21, так и в точке 23, больше нуля, чем и достигается, в частности, перекрытие мертвых точек 20 и 24 в траектории 19 перемещения педалей 17 и 18 и, кроме того, увеличивается среднее значение суммарного вращающего момента.
Привод, изображенный на фиг. 3, работает подобно приводу, изображенному на фиг. 1 и фиг. 2, за исключением того, что за счет уменьшения угла Д, на который-сдвинуты друг относительно друга кривошипы 5 и 6 и 7 и 8, уменьшается степень перекрытия мертвых точек 20 и 24 в траектории 19, а за чет одновременного уменьшения значение угла В, под которым шатуны 13 и 14 направлены друг к другу в средней точке 22 ее активной части, увеличивается сумма абсолютных значений составляющих сил при неизменном значении искомой силы F, при этом значения углов А и Б, под которыми шатуны 13 и 14 направлены к соответствующим кривошипам 5 и 7, составляют 9vO° в разных точках траектории 19 по обе стороны от точки 22, чем достигается более главное изменение вращающего момента на этом интервале. Следует отметить также О1носительно большее увеличение амплитуды траектории 19 в поперечном направлении, чем ее у.меньшение в продольном направлении.
Привод, изображенный на фиг. 4 и 5, работает подобно приводу, изображенному на фиг. 1 и фиг. 2, за исключением того, что значение углов А и Б, под которыми направлены шатуны 13 и 14 к соответствующим кривошипам 5 и 7, составляет 90° в разных точках активного участка траектории 19, чем достигается более плавное изменение значения суммарного вращающего момента. Кроме того, величина угла Б, под которым шатун 15 направлен к кривошипу 7 в точке 23, больше величины угла А, под которым шатун 13 направлен к кривошипу 5 в точке 21 активной части траектории 19, поэтому значение суммарного вращающего момента в конце рабочего хода при перемещении педали 17 по часовой стрелке от точки 20 к точке 24 и постоянном значении силы, направленной по касательной к точкам траектории 19, больше, чем значение суммарного вращающего момента в начале рабочего хода и наоборот, если перемещение педали 17 от точки 24 к точке 20 производится против часовой стрелки, то значение суммарного вращающего момента в начале рабочего хода больше, чем в его конце. Кроме того, возможность перестановки педалей 17 и 18 на удлиненные концы шатунов
13 и 15 в точки 31 и 32 соответственно, позволяет также увеличивать значение суммарного вращающего момента в начале или в конце их рабочего хода в зависимости от его направления. Увеличение суммарного
f. вращающего момента происходит за счет дополнительного вращающего момента, образованного силой F относительно оси шарнирного соединения шатуна 13 с шатунами 14. При этом на ось шарнирного соединения шатуна 13 с кривошипом 5 наряду с
5 силой FZ действует сила / 4, вызванная наличием дополнительного вращающего момента. Результатом сложения сил FZ и F4 является сила Fs, направленная к кривошипу 5 под больщим под значению углом, чем сила F, в результате чего дости гается увеличение вращающего момента на валу 3. Кроме того, вдоль щатуна 14 действует сила fe, численно равная сумме абсолютных значений сил Fs и F4, поэтому величина вращающего момента на валу 4 также
5 увеличивается. По мере удаления от начала активной части траектории 19 величина дополнительного вращающего момента на валу 3 уменьшается и становится равной нулю в тот момент, когда шатун 13 направлен к кривошипу 5 под прямым углом
0 вблизи от точки 22. Далее величина дополнительного вращающего момента на валу 3 увеличивается, но с обратным знаком. Величина суммарного дополнительного момента равна нулю, когда силы Fe и F направлены к кривошипам 5 и 7 соответственно
S под одинаковым углом вблизи от точки 23. Следует отметить, что в конце активной части траектории 19 эффективное плечо удлиненного конца шатуна 13 (или 15) по отношению к силе значительно уменьшается
Q и на работу привода влияет в меньшей степени, чем в начале активной части траектории 19.
Привод (фиг. 6) работает следующим образом.
5 Предварительно педали 17 и 18 устанавливают на удлиненных концах 31 и 32 так, чтобы направление мускульного усилия F в конце активной части траектории 19 совпадало с направлением прямой, проходящей через ось взаимного соединения
0 шатунов 13 и 14 и 15 и 16, т. е. чтобы эффективное плечо каждого из удлиненных концов 31 и 32 во второй половине активной части траектории 19 было равно или близко по значению нулю, в результате чего привод работает аналогично приводу,
5 изображенному на фиг. 4 и фиг. 5, в первой половине активной части траектории 19, для случая, когда педали 17 и 18 установлены на удлиненных концах 31 и 32, а во второй
половине, для случая, когда педали 17 и 18 установлены на осях взаимных соединений шатунов 13 и 14 и 15 и 16.
Привод, изображенный на фиг. 7, в зависимости от места установки педалей 17 и 18 работает подобно приводу, изображенному на фиг. 4 и фиг. 5 или на фиг. б, за исключением того, что уменьшение расстояния между валами 3 и 4 позволяет при меньшем значении амплитуды траектории 19 в продольном направлении увеличить как величину угла А, под которым шатуны 13 и 15 направлены к соответствуюшим кривошипам 5 и б в начале активной части траектории 19, так и величину угла Б, под которым направлены шатуны 14 и 16 к соот- ветствуюшим кривошипам 7 и 8 в конце активной части траектории 19 при переме- шении педалей 17 и 18 по часовой стрелке. Основным отличием привода является его компактность.
Привод, изображенный на фиг. 8, работает аналогично приводу, изображенному на фиг. 7, за исключением того, что при установке педалей 17 и 18 на удлиненных концах 36 и 37 более коротких шатунов 14 и 16 траектория 19 расположена более симметрично относительно валов 3 и 4 и увеличение суммарного врашающего момента при направлении рабочего хода по часовой стрелке происходит во второй половине активной части траектории 19.
Привод, изображенный на фиг. 9, работает подобно приводу, изображенному на фиг. 7, за исключением того, что за счет увеличения длины кривошипов 7 и 8 увеличивается среднее значение суммарного врашающего момента, а максимальная амплитуда траектории 19 в поперечном направлении увеличивается значительно в меньшей степени.
Привод, изображенный на фиг. 6, работает аналогично приводу, изображенному на фиг. 4 и фиг. 5 при установке в нем педалей 17 и 18 на осях шарнирных соединений тяг (шатунов) 13 и 14 и 15 и 16, за исключением того, что вследствие уменьшения расстояния между осями валов 3 и 4, как тяги (шатуны) 13 и 15 в начале активной части траектории 19, так и тяги (шатуны) 14 и 16 в конце ее (при перемещении педалей 17 и 18 по часовой стрелке) направлены к соответствующим кривошипам 5 и 6 и 7 и 8 под большим по.значению углом, что сопровождается более равномерным изменением суммарного вращаюшего момента.
Привод, изображенный на фиг. 7, работает аналогично приводу, изображенному на фиг. 4 и фиг. 5, при установке в нем педалей 17 и 18 на удлиненных концах тяг, за исключением того, что длины кривошипов 7 и 8 сопровождается увеличением значения суммарного вращающего момента в конце активной части траектории 19 при
перемещении педалей 17 и 18 по часовой стрелке.
Привод, изображенный на фиг. 7 позволяет в более широких пределах и более плавно изменять форму, амплитуду траектории перемещения педалей 17 и 18 и ее расположение относительно рамы 1 в процессе наладки привода путем изменения длцны шатунов 13-16, а следовательно, и длины их концов 31 и 32 путем изменения эффек тивной длины кривошипов и расстояния между валами 3 и 4.
Для изменения длины шатунов 13 и 15 отпускают зажимы 39 и 40 и выдвигают или вдвигают на необходимое расстояние
5 их внутренние части 42 и 44 относительно внешних частей 41 и 43, а затем зажимы 45 и 45 затягивают.
Для изменения длины 14 и 16 отпускают зажимы 51 и 52 и выдвигают или вдвигают на необходимое расстояние их
0 внутренние части 48 и 50 относительно внешних частей 47 и 49, а затем зажимы 51 и 52 затягивают.
Для изменения длины концов 31 и 32 шатунов 13 и 15 отпускают зажимы 53 и 54
5 и удаляют их от осей педалей 17 и 18 вдоль частей 42 и 44 на необходимое расстояние, а затем зажимы 53 и 54 затягивают.
Для изменения расстояния между валами 3 и 4 отпускают зажим 40 и выдви0 гают или вдвигают на необходимое расстояние внутреннюю часть 39 рамы 1 относительно ее внешней части 38, а зате.м зажим 40 затягивают.
Для изменения эффективной длины кривошипов 5 и 6 или 7 и 8 оси их шарнир5 ных соединений с соответствующими шатунами 13 и 15 или 14 и 16 переставляют в отверстия 57, где их фиксируют с помощью резьбового соединения.
Привод (фиг. 11), установленный на велор сипеде, работает практически так же, как и привод, изображенный на фиг. 7. При этом изменение амплитуды, формы траектории 19 перемещения педалей 17 и 18 и ее расположение относительно человека могут быть изменены путем регулировки привода.
5 Для осуществления регулировки привода отпускают зажим 58 и крепление оси 60 колеса 61 на вилке. После этого перемещают ось 60 ближе к участку 1 рамы 59 и сни.мают цепь 12 с велуьчих звездочек 9 и 10. Затем устанавливают вал 4 на необходимом
расстоянии от вала 3 путем перемещения опоры 2 с зажимом 58 вдоль участка I рамы 59 и затяг ивают зажим 58. Далее сдвигают кривошипы 5 и 6 и 7 и 8 на необходимый угол и связывают звездочки 9-1 1 цепью 12.
5 После этого натягивают цепь 12 путем удаления оси 60 от участка I рамы 59 и затягивают крепление оси 60 на вилке 62. При необходимости оси педалей 17 и 18 могут
11
быть переставлены в дополнительные отверстия 33 и 34.
Формула изобретения
I. Мускульный привод транспортного средства, содержащий цепную передачу, ведущая звездочка которой закреплена на раме, а ведомая звездочка установлена на оси колеса, на валу ведущей звездочки с двух ее сторон смонтированы кривощипы, противоположно направленные концами относительно друг друга в плоскости, проходящей через продольные оси криво.щипов и ось вала ведущей звездочки, при этом каждый кривощип щарнирно связан с тягой, педали, установленные на тягах, а также дополнительные тяги, отличающийся тем, что, с целью повыщения эффективности работы привода путем перекрытия мертвых точек в траекториях перемещения педалей, он снаб30
12
жен дополнительной звездочкой, размещенной на раме и охватываемой цепью, на оси которой с двух сторон смонтированы диаметрально противоположно направленные кривощипы, каждый из которых щарнирно связан с дополнительной тягой, щарнирно соединенной со свободным концом соответствующей тяги кривощипа ведущей звездочки, при этом кривощипы ведущей и дополнительных звездочек расположены под углом друг к другу.
25
21
Физ.2
25
Фиг.З )(Л
32
игл
Фиг. 5
21
jj
йг
75
73
2Г
1Э
Фиг.8
23
Фиг. 7
/4ГЗ
Фт.З
45
57
фиг. 10
1,53
60
6Г
Фиг., ff
| Шнековый конвейер | 1979 |
|
SU772948A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Приспособление к рогульчатым ватерам для торможения катушки | 1924 |
|
SU1934A1 |
