Изобретение относится к транспортным средствам, приводимым в движение мускульной силой человека, в частности к приводам велосипедов и веломобилей, и является дополнительным к авт.ев № 1497101.
Целью изобретения является расширение эксплуатационных возможностей привода за счет плавного изменения траектории педалирования в процессе регулировки привода.
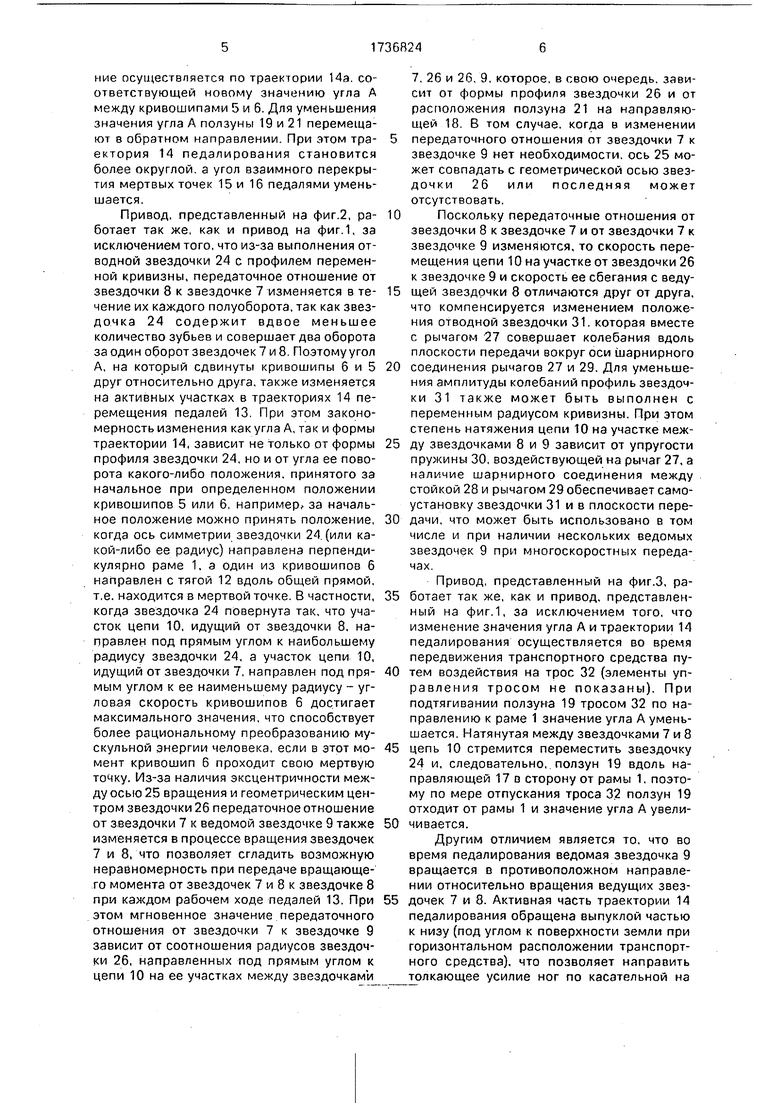
На фиг.1 изображен мускульный привод с возможностью плавного изменения угла между парами кривошипов; на фиг 2 - то же, с возможностью изменения угла между парами кривошипов в каждом периоде вращеЮ
ния педалей: на фиг 3 - то же, с вращением ведомой звездочки относительно ведущих звездочек в противоположном направлении и с возможностью изменения угла наклона траектории в конкретном транспортном средстве.
Мускульный привод транспортного средства, представленный на фиг. 1, содержит раму 1. где на опорах 2 установлены валы 3 и 4, на которых закреплены попарно кривошипы 5 и б и ведущие звездочки 7 и 8 соответственно. Звездочки 7 и 8 связаны с ведомой звездочкой 9 посредством бесконечной цепи 10. С кривошипами 5 соединено шарнирно по тяге 11. а с кривошипами 6 - по тяге 12, выполненные в виде шатунов. Каждая тяга 11 соединена шарнирно с соответствующей тягой 12, причем на осях их шарнирных соединений установлено по педали 13. Пара кривошипов 5 сдвинута относительно пары кривошипов 6 против часовой стрелки на угол, численно равный углу А, образованному путем пересечения лучей, проходящих вдоль их проекций, и от величины которого зависит форма траектории 14 перемещения педалей 13 и степень их взаимного перекрытия мертвых точек 15 и 16. Между звездочками 7, 8 и 7, 9 расположены направляющие 17 и 18 соответственно, соединенные с рамой 1. С направляющей 17 связан ползун 19, снабженный стопорным винтом 20, а с направляющей 18 связан ползун 21, снабженный стопорным винтом 22. На ползуне 19 установлена ось 23 отводной звездочки 24, связанной с цепью 10 на участке между звездочками 7 и 8. На ползуне 21 установлена ось 25 отводной звездочки 26, связанной с цепью 10 на участке между звездочками 7 и 9.
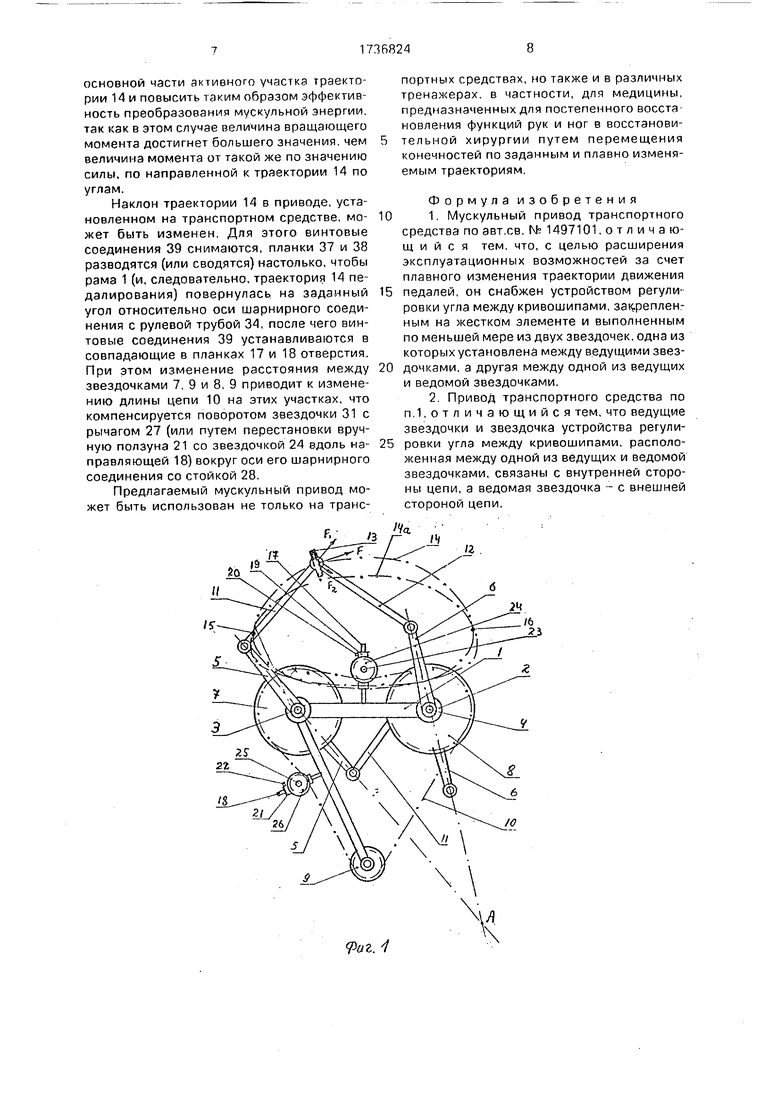
Привод, представленный на фиг.2, аналогичен приводу, представленному на фиг.1, за исключением того, что отводная звездочка 24 выполнена с профилем переменной кривизны, а ось 25 звездочки 26 расположена эксцентрично относительно ее геометрической оси, причем количество зубьев в каждой из них в два раза меньше, чем у звездочек 7 и 8. Кроме того, между звездочками 8 и 9 расположен рычаг 27, связанный с рамой 1 посредством карданной муфты, содержащей стойку 28. рычаг 29, шарнирно соединенный с ней и рычагом 27. пружину 30, подтягивающую рычаг 27 к рычагу 29 вокруг оси соединения. На рычаге 27 установлена отводная звездочка 31. натягивающая цепь 10 на участке между звездочками 8 и 9.
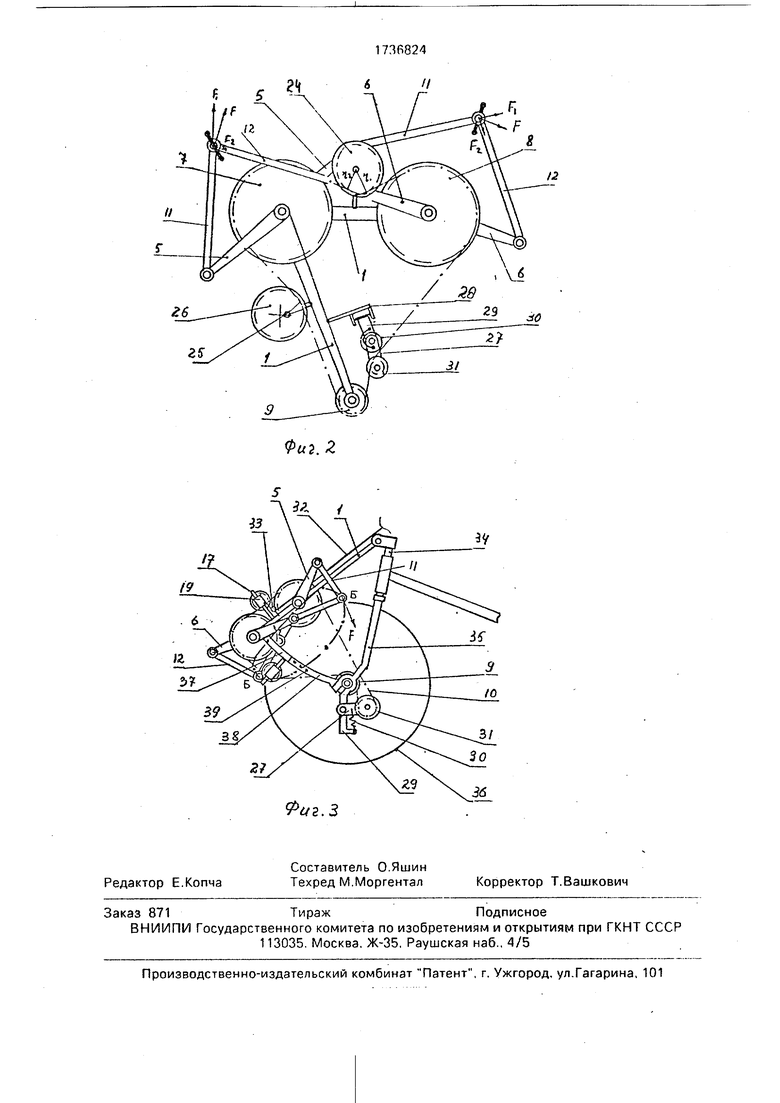
Привод, представленный на фиг.З. аналогичен приводу, представленному на
фиг 1, за исключением того, что отводная звездочка 31 входит в зацепление с внутренней стороной цепи 10, а ведомая звездочка 9 - с ее внешней стороной. При этом
звездочка 31 установлена на рычаге 27, связанном со стойкой 28 шарнирно и пружиной 30. степень упругости которой определяет натяжение цепи 10 звездочкой 30. Кроме того, ползун 19 связан с тросом 32 управления. пропущенным через отводной ролик 33. установленный на раме вблизи ее соединения с направляющей 17 в сторону рулевой трубы 34 транспортного средства. Рама 1 установлена на транспортном средстве так,
5 что вершина угла Б, образованного тягами 11 и 12, направлена книзу. При этом рама 1 связана шарнирно с рулевой трубой 34, а с поворотной вилкой 35 переднего колеса 36 - посредством изогнутых по дуге планок
0 37 и 38. состыкованных между собой винтовыми соединениями 39.
Привод, представленный на фиг.1. работает следующим образом.
Сила F, приложенная к педали 13, рас5 кладывается на составляющие силы Р иР. направленные вдоль шатунов 11 и 12 и приложенные к кривошипам 5 и 6 соответственно, и создает таким образом вращающие моменты на валах 3 и 4. Эти вращающие
0 моменты суммируются в цепной передаче, образованной звездочками 7,8, 8, 24 и 26 и бесконечной цепью 10. Результирующий вращающий момент снимается с ведомой звездочки 9. Траектория перемещения пе5 далей 13 зависит при постоянных размерах указанных звеньев привода от угла А, на который сдвинуты друг относительно друга кривошипы 5 и 6. Для изменения траектории 14 с одновременным изменением сте0 пени взаимного перекрытия мертвых точек 15 и 16 педалями 13 отпускают винты 20 и 22. В том случае, когда необходимо получить более вытянутую форму траектории 14 (или увеличить степень перекрытия мертвых то5 чек 15 и 16), ползун 19 по направляющей 17 и, следовательно, вместе с ним ось 23 с отводной звездочкой 24 смещаются вручную в сторону от рамы 1. Натяжение цепи 10 между звездочками 7 и 8 при этом ослабева0 ет и кривошипы 5 и 6 раздвигаются друг относительно друга на больший по значению заданный угол. После этого затягивают стопорный винт 20, фиксируя таким образом ползун 19. Затем перемещают ползун
5 21 по направляющей 18 и, следовательно, вместе с ним ось 25 с отводной звездочкой 26 по направлению к раме 1, восстанавливая таким образом натяжение цепи 10. После этого затягивают стопорный винт 22. фиксируя при этом ползун 21. и педалирование осуществляется по траектории 14а. соответствующей новому значению угла А между кривошипами 5 и 6. Для уменьшения значения угла А ползуны 19 и 21 перемещают в обратном направлении. При этом тра- ектория 14 педалирования становится более округлой, а угол взаимного перекрытия мертвых точек 15 и 16 педалями уменьшается.
Привод, представленный на фиг.2, ра- ботает так же, как и привод на фиг.1, за исключением того, что из-за выполнения отводной звездочки 24 с профилем переменной кривизны, передаточное отношение от звездочки 8 к звездочке 7 изменяется в те- чение их каждого полуоборота, так как звез- дочка 24 содержит вдвое меньшее количество зубьев и совершает два оборота за один оборот звездочек 7 и 8. Поэтому угол А, на который сдвинуты кривошипы 6 и 5 друг относительно друга, также изменяется на активных участках в траекториях 14 перемещения педалей 13. При этом закономерность изменения как угла А, так и формы траектории 14, зависит не только от формы профиля звездочки 24, но и от угла ее поворота какого-либо положения, принятого за начальное при определенном положении кривошипов 5 или 6, например, за начальное положение можно принять положение, когда ось симметрии звездочки 24 (или какой-либо ее радиус) направлена перпендикулярно раме 1. а один из кривошипов 6 направлен с тягой 12 вдоль общей прямой, т.е. находится в мертвой точке. В частности, когда звездочка 24 повернута так, что участок цепи 10, идущий от звездочки 8. направлен под прямым углом к наибольшему радиусу звездочки 24, а участок цепи 10, идущий от звездочки 7, направлен под пря- мым углом к ее наименьшему радиусу - угловая скорость кривошипов 6 достигает максимального значения, что способствует более рациональному преобразованию мускульной энергии человека, если в этот мо- мент кривошип 6 проходит свою мертвую точку. Из-за наличия эксцентричности между осью 25 вращения и геометрическим центром звездочки 26 передаточное отношение от звездочки 7 к ведомой звездочке 9 также изменяется в процессе вращения звездочек 7 и 8, что позволяет сгладить возможную неравномерность при передаче вращающего момента от звездочек 7 и 8 к звездочке 8 при каждом рабочем ходе педалей 13. При этом мгновенное значение передаточного отношения от звездочки 7 к звездочке 9 зависит от соотношения радиусов звездочки 26, направленных под прямым углом к цепи 10 на ее участках между звездочками
7, 26 и 26, 9, которое, в свою очередь, зависит от формы профиля звездочки 26 и от расположения ползуна 21 на направляющей 18. В том случае, когда в изменении передаточного отношения от звездочки 7 к звездочке 9 нет необходимости, ось 25 может совпадать с геометрической осью звездочки 26 или последняя может отсутствовать.
Поскольку передаточные отношения от звездочки 8 к звездочке 7 и от звездочки 7 к звездочке 9 изменяются, то скорость перемещения цепи 10 на участке от звездочки 26 к звездочке 9 и скорость ее сбегания с ведущей звездочки 8 отличаются друг от друга, что компенсируется изменением положения отводной звездочки 31. которая вместе с рычагом 27 совершает колебания вдоль плоскости передачи вокруг оси шарнирного соединения рычагов 27 и 29. Для уменьшения амплитуды колебаний профиль звездочки 31 также может быть выполнен с переменным радиусом кривизны. При этом степень натяжения цепи 10 на участке между звездочками 8 и 9 зависит от упругости пружины 30, воздействующей на рычаг 27, а наличие шарнирного соединения между стойкой 28 и рычагом 29 обеспечивает самоустановку звездочки 31 и в плоскости передачи, что может быть использовано в том числе и при наличии нескольких ведомых звездочек 9 при многоскоростных передачах.
Привод, представленный на фиг.З, работает так же, как и привод, представленный на фиг.1, за исключением того, что изменение значения угла А и траектории 14 педалирования осуществляется во время передвижения транспортного средства путем воздействия на трос 32 (элементы управления тросом не показаны). При подтягивании ползуна 19 тросом 32 по направлению к раме 1 значение угла А уменьшается. Натянутая между звездочками 7 и 8 цепь 10 стремится переместить звездочку 24 и, следовательно, ползун 19 вдоль направляющей 17 о сторону от рамы 1, поэтому по мере отпускания троса 32 ползун 19 отходит от рамы 1 и значение угла А увеличивается.
Другим отличием является то, что во время педалирования ведомая звездочка 9 вращается в противоположном направлении относительно вращения ведущих звездочек 7 и 8. Активная часть траектории 14 педалирования обращена выпуклой частью к низу (под углом к поверхности земли при горизонтальном расположении транспортного средства), что позволяет направить толкающее усилие ног по касательной на
основной части активного участка траектории 14 и повысить таким обрэзом эффективность преобразования мускульной энергии. так как в этом случае величина вращающего момента достигнет большего значения, чем величина момента от такой же по значению силы, по направленной к траектории 14 по углам.
Наклон траектории 14 в приводе, установленном на транспортном средстве, может быть изменен. Для этого винтовые соединения 39 снимаются, планки 37 и 38 разводятся (или сводятся) настолько, чтобы рама 1 (и, следовательно, траектория 14 педалирования) повернулась на заданный угол относительно оси шарнирного соединения с рулевой трубой 34, после чего винтовые соединения 39 устанавливаются в совпадающие в планках 17 и 18 отверстия. При этом изменение расстояния между звездочками 7, 9 и 8, 9 приводит к изменению длины цепи 10 на этих участках, что компенсируется поворотом звездочки 31 с рычагом 27 (или путем перестановки вручную ползуна 21 со звездочкой 24 вдоль направляющей 18) вокруг оси его шарнирного соединения со стойкой 28.
Предлагаемый мускульный привод может быть использован не только на транспортных средствах, но также и в различных тренажерах, в частности, для медицины, предназначенных для постепенного восста новления функций рук и ног в еосстанови- тельной хирургии путем перемещения конечностей по заданным и плавно изменяемым траекториям.
Формула изобретения
1. Мускульный привод транспортного
средства по авт.св. № 1497101 .отличающийся тем, что, с целью расширения эксплуатационных возможностей за счет плавного изменения траектории движения
педалей, он снабжен устройством регулировки угла между кривошипами, закрепленным на жестком элементе и выполненным по меньшей мере из двух звездочек, одна из которых установлена между ведущими звездочками, а другая между одной из ведущих и ведомой звездочками.
2. Привод транспортного средства по п.1,отл и чающийся тем, что ведущие звездочки и звездочка устройства регулировки угла между кривошипами, расположенная между одной из ведущих и ведомой звездочками, связаны с внутренней стороны цепи, а ведомая звездочка - с внешней стороной цепи.

Изобретение относится к транспортным средствам, приводимым в движение мускульной силой человека, в частности к приводам велосипедов и веломобилей, и является усовершенствованием известного привода по автсв № 1497101. Целью изобретения является расширение эксплуатационных возможностей привода за счет плавного изменения траектории изменения педалей. Привод содержит раму на опорах которой установлены валы с закрепленными на них попарно кривошипами и ведущими звездочками. Звездочки связаны с ведомой звездочкой посредством бесконечной цепи С кривошипами соединены шар- нирно тяги, выполненные в виде шатунов. Пара кривошипов сдвинута относительно другой пары кривошипов против часовой стрелки на угол А. От величины этого угла зависит форма траектории перемещения педалей и степень их взаимного перекрытия мертвых точек. Сила, приложенная к педали направлена вдоль шатунов, а приложенная к кривошипам создает вращающие моменты на валах Эти моменты суммируются в цепной передаче, образованной звездочками и цепью Для изменения траектории с одновременным изменением степени перекрытия мертвых точек смещают ползун Производят изменение расположения одного кривошипа относительно другого на необходимый по значению угол. Затем перемещают ползун с отводной звездочкой по направляющей, восстанавливают натяжение цепи При выполнении отводной звездочки с профилем переменной величины или кривизны количество зубьев ее уменьшается в два раза, а ось этой звездочки смещается эксцентрично относительно ее геометрической оси. Это позволяет сгладить возможную неравномерность при передаче вращающего момента от одних звездочек к другой звездочке и способствует более рациональному преобразованию мускульной энергии человека 1 з.п ф-лы, 3 ил сл XI СА О 00 N3
20
Фиг. 4
12
Фиъ.2
Риг.З
JO
ЗУ
36
| Мускульный привод транспортного средства | 1987 |
|
SU1497101A1 |
