Изобретение относится к маг нктньпч измерениям и может быгь использовано для автоматизированного определения д шэJ ичecкиx петель гистерезиса.
Hejib нзобретенрш - повьппение производительности определения динамических петель гистерезиса (ДПГ).
Ни. фиг. 1-2 изображены треугольники,, связывающие действующие (значения сигналов| на фиг„ 3 - струтстурная сх схема устройства, реализующего ,способ.
Сущность предлагаемого способа определения динамических петель гнетерезиса ферромагнитных катериалов заключается в следующем.
Сигналы компенсируемого и компен- сируюг дего напряжений Ug(t) и U (t) пропорциональны индукции магнитного поля испытуемого образца,, а сигналы Uu(t) и и (t) пропорциональны напряП
женности магнитного поля испытз емого образца. Рассмотрим процесс компенсации на примере сигнала Ug(t) при ко- синусоидальном режиме перемагничива- ния образца (Uf(t) „„, cos , где f - частота перенагничивани:я Uj, амплитуда сигнала, пропорционального напряженности магнитного поля), В этом случае отсутствуют постоянная составляющая сигнала к четные гармоники
.1 , Начинают процесс перемагничива НИЛ испытуемого образца Сигнал компенсирующего напряжения (компенсирующий сигнал) Ug (t) равен нулю
2,. Измеряют действующее значение и„ компенсируемого с ит яапа Ug(t:). Палученное значение фиксир-5,йТ;
3, Генерируют сигнал сшусоидаль- ной составляющей первой гармоники и и,д(с) с произвольно выбранной амплитудой А, лежащей в диаша зоне амплитуд измеряемых сигналов, и опреде ляют действующее значение сигнала по известной формуле U
613
Г2
6 Определяют действующее значение и. сигнала синусоидальной сос3 5 „
тавляющеи первой гармоники, соответствующее минимальноьгу значению погрешности компенсации (минргмальному действующему значению U сигнала разР
ности и (t) по выражению;
и t J
pft
(Ue.sf - (UU)
2 (,5 )
(1)
5
0
5
(треугольник, связывающий действую- rojie значения сигналов по формуле (1) показан на фиг, 1) и амплитуду А, сигнала синусои,цальной составляющей первой гармоники, соответствующую действующему значению U-,-. как А,
о Vo1
.F; и,,,,
/о Окончательно формируют компен iскрующий сигнал (t) , уравновешенный с сигналом Ug(t) по синусоидаль- ной составляющей первой гармоники путем добавления к сигналу U (t)
Сп„ 1) сигнала синусоидальной состав- ляюш;ей первой гармоники с амплитудой А, ,
8 Определяют погрешность компенР
сации Ug,- при уравновешивании сигнала Ug(t) компенсирующим сигналом
ц (t) по формуле;
и
S15
ifaji) - - (bvj (2)
9. Проводят компенсацию по косину- соидальной составляющей первой гармоники способом, описанным в пп. 3-8„ При этом в ппо 6 и 8 в качестве действующего значения Ug использут т действующее значение U/ сигнала разpit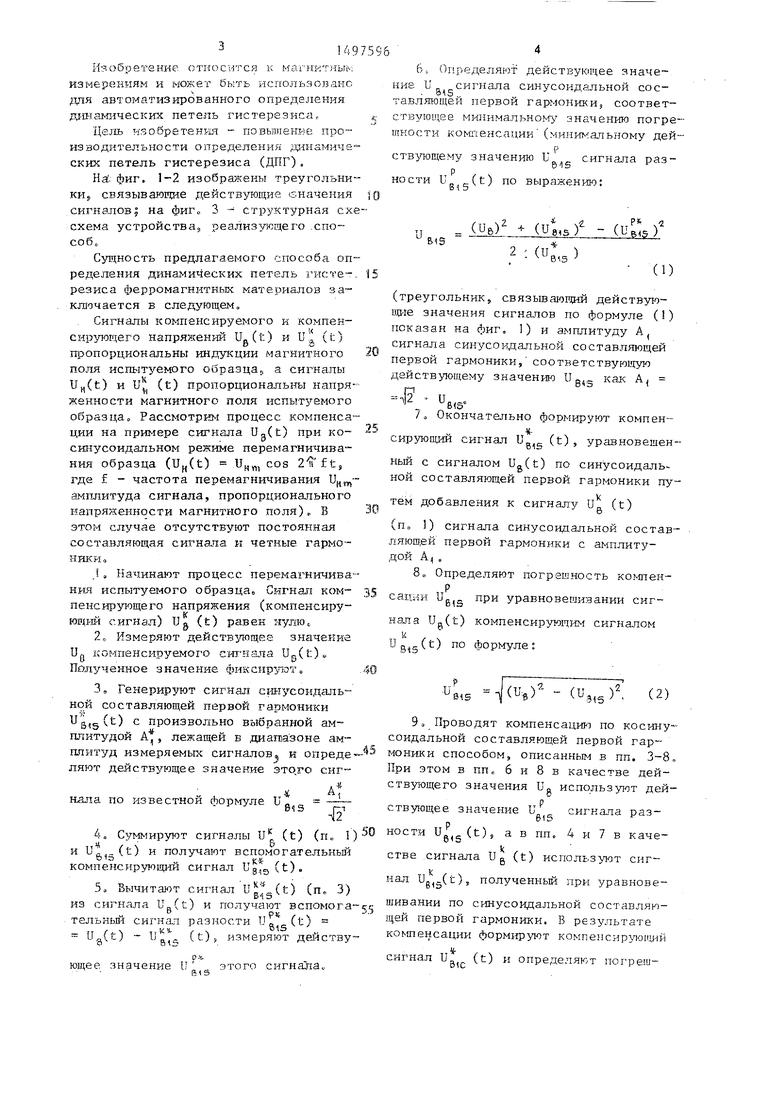

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения динамических петель гистерезиса ферромагнитных материалов | 1985 |
|
SU1264119A1 |
| Преобразователь угол-фаза-код | 1983 |
|
SU1153335A2 |
| Устройство для измерения малых коэффициентов гармоник | 1983 |
|
SU1150573A1 |
| Магнитометр | 1984 |
|
SU1275338A1 |
| Способ измерения составляющей вектора скорости потока газа или жидкости | 1979 |
|
SU885891A1 |
| Способ преобразования угла поворота вала фазовращателя в код | 1986 |
|
SU1458973A1 |
| Регулируемый электропривод постоянного тока с периодической нагрузкой | 1981 |
|
SU985915A1 |
| ФИЛЬТРО-КОМПЕНСИРУЮЩЕЕ УСТРОЙСТВО ВЫСОКОВОЛЬТНОЙ ПЕРЕДАЧИ ЭНЕРГИИ ПОСТОЯНННЫМ ТОКОМ | 2012 |
|
RU2521428C2 |
| Устройство для управления @ -пульсным выпрямителем | 1983 |
|
SU1319196A1 |
| Цифровой феррозондовый измеритель азимута | 1987 |
|
SU1498913A1 |
Изобретение относится к магнитным измерениям и может быть использовано для автоматизированного определения динамических петель гистерезиса (ДПГ) ферромагнитных материалов. Цель изобретения - повышение производительности определения динамических петель гистерезиса. Способ заключается в следующем. Начинают процесс перемагничивания испытуемого образца. Измеряют действующее значение напряжения (Н) компенсируемого сигнала (С). Генерируют С синусоидальной составляющей первой гармоники (Г) с произвольно выбранной амплитудой и определяют действующее значение этого С по формуле. Суммируя С, получают вспомогательный компенсирующий С, который вычитают из компенсируемого С, получая вспомогательный С разности. Измеряют его действующее значение. Определяют действующее значение С и амплитуду синусоидальной составляющей первой Г. Окончательно формируют компенсирующий С, уравновешенный с компенсируемым С по синусоидальной составляющей первой Г, путем добавления С синусоидальной составляющей первой Г с амплитудой к компенсирующему С. Определяют погрешность компенсации С синусоидальной составляющей первой Г при уравновешивании компенсируемого С компенсирующим С. Проводят компенсацию по косинусоидальной составляющей первой Г способом, описанным выше. Проводят формирование компенсирующего С путем поочередного уравновешивания его с компенсируемым С по синусоидальным и косинусоидальным составляющим последующих нечетных Г описанным выше способом. Процесс компенсации завершают тогда, когда после добавления очередной составляющей I-U2 гармоники погрешность компенсации вспомогательного компенсирующего С станет меньше погрешности ее измерения. Компенсацию С амплитуды С компенсирующим производят одновременно с вышеописанной компенсацией. По завершении процессов компенсации производят регистрацию ДПГ по сформированным в процессе компенсации С компенсирующего напряжения, которые уравновешены с одноименными сигналами компенсируемого напряжения по I гармоникам. 3 ил.
4„ Суммируют сигналы U (t) (п„ 1)50 ности (t), а в пп. 4 и 7 в каче- и Uj,,-(t) и получают вс помогательньп стве сигнала Ug (t) используют сигкомпенсируюищй сигнал Ug,|3(t).
5, Вычитают сигнал (t) (п. 3)
015
ИЗ сигнала Up.(t) и получают в с помог ательньй сигнал разности U - ) - , t)
pit
(t)
55
eis измеряют де1йству
нал (t), полученньй при уравновешивании по синусоидальной составляющей первой гармоники. В результате компенсации форм11руют компепсир тощий
ющее значение U этого CHrHajia.
нал (t), полученньй при уравновешивании по синусоидальной составляющей первой гармоники. В результате компенсации форм11руют компепсир тощий
сигнал Ug (t) и определяют погрешкомпенсации U
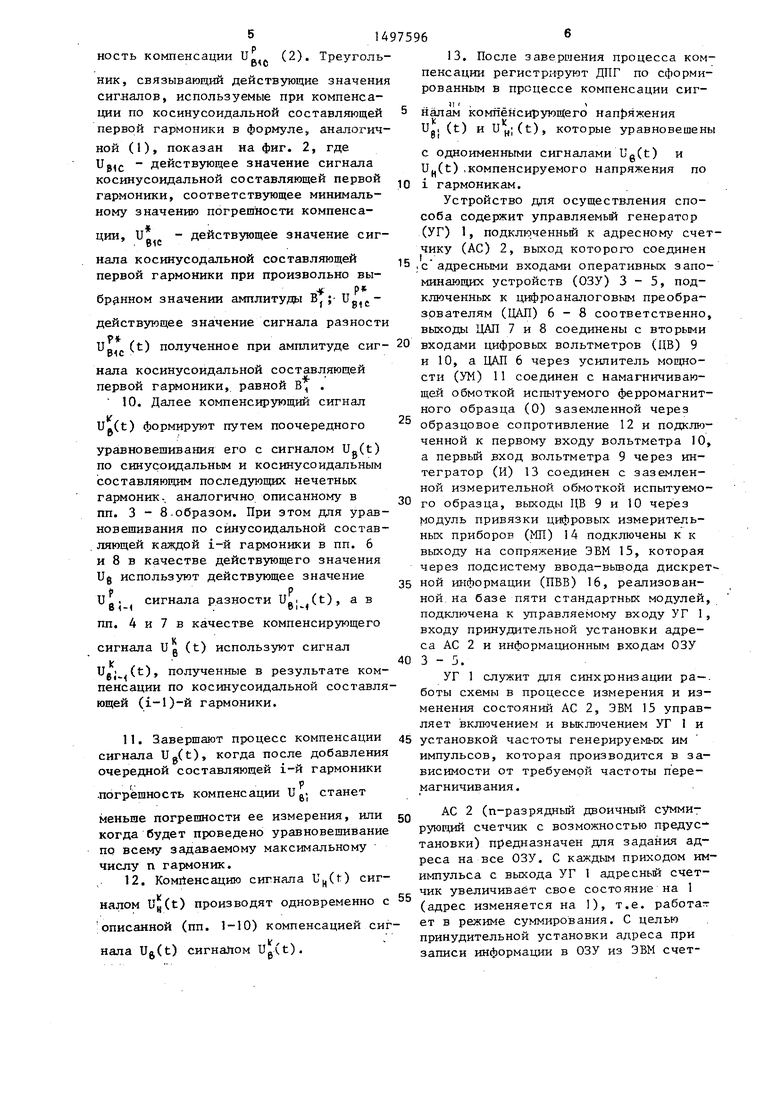
1497596 (2). Треугольп
ник, связывающий действующие значения сиглалов, используемые при компенсации по косинусоидальной составляющей первой гармоники в формуле, аналогичной (1), показан на фиг. 2, где В1С действующее значение сигнала косинусоидальной составляющей первой гармоники, соответствующее минимальному значению погрещности компенсации, и - действующее значение сиг- В1с
нала косинусодальной составляющей первой гармоники при произвольно вып. ., Р
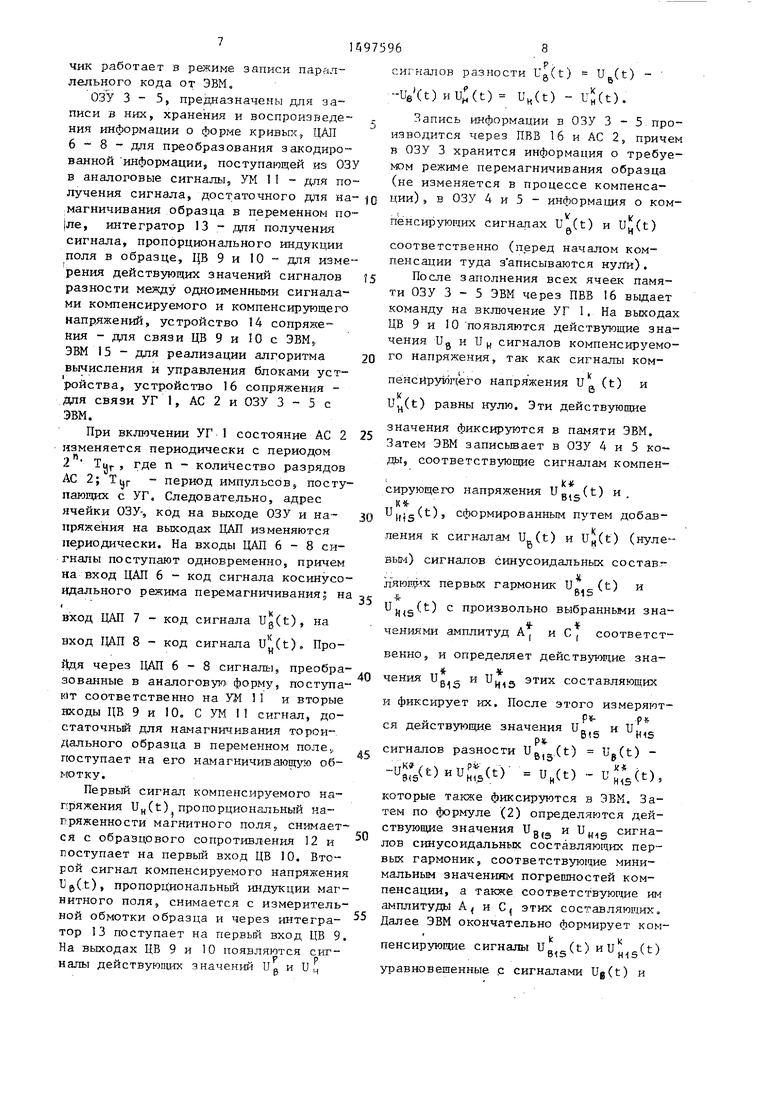
Устройство для осуществления способа содержит управляемый генератор (УГ) 1, подключенньй к адресному счетчику (АС) 2, выход которого соединен
5 ; с адресными входами оперативных запоминающих устройств (ОЗУ) 3-5, подключенных к цифроаналоговым преобразователям (ЦАП) 6-8 соответственно, выходы ЦАП 7 и 8 соединены с вторыми (t) полученное при амплитуде сиг- 20 входами цифровых вольтметров (ЦВ) 9
бранном значении амплитуды В ; действующее значение сигнала разности
и
В1С
нала косинусоидальной составляющей первой гармоники, равной В, .
jf U.(t) формируют путем поочередного
уравновешивания его с сигналом Uo(t) по синусоидальным и косинусоидальным составляющим последующих нечетных гармоник-, аналогично описанному в пп. 3 - 8.образом. При этом для урав- новещивания по синусоидальной составляющей каждой i-й гармоники в пп. 6 и 8 в качестве действующего значения Ug используют действующее значение
ьр
и„. сигнала разности U-. (t), а в
в1-(.Dl f
ПП. 4 И 7 В качестве компенсирующего
и 10, а иди 6 через усилитель мощности (УМ) 11 соединен с намагничивающей обмоткой испытуемого ферромагнитного образца (0) заземленной через
образцовое сопротивление 12 и подключенной к первому входу вольтметра 10, а первый вход вольтметра 9 через интегратор (И) 13 соединен с заземленной измерительной обмоткой испытуемо30 го образца, выходы ЦВ 9 и 10 через модуль привязки цифровых измерительных приборов (МП) 14 подключены к к выходу на сопряжение ЭВМ 15, которая через подсистему ввода-вывода дискрет35 ной информации (ПВВ) 16, реализованной на базе пяти стандартных модулей, подключена к управляемому входу УГ 1, входу принудительной установки адреса АС 2 и информационным входам ОЗУ
,к 6
сигнала UQ (t) используют сигнал
Ugj (t), полученные в результате компенсации по косинусоидальной составляющей (1-1)-й гармоники.
.погрешность компенсации U gj станет
50
АС 2 (п-разрядньш двоичный сумми- руюгдий счетчик с возможностью предус- тановки) предназначен для задания адреса на все ОЗУ. С каждым приходом им- импульса с выхода УГ 1 адресньм счетчик увеличивает свое состояние на 1 налом U(t) производят одновременно с 5 р, изменяется на 1), т.е. работает
описанной (пп. 1-10) компенсацией сигменьше погрешности ее измерения, или когда будет проведено уравновешивание пр всему задаваемому максимальному числу п гармоник.
нала Ug(t) сигналом Ug(t).
6
7596
ь налам компенсирующего нап{)яжения
Ug, (t) и (t), которые уравновешены
с одноименными сигналами Ug(t) и U(t).компенсируемого напряжения по
10 1 гармоникам.
Устройство для осуществления способа содержит управляемый генератор (УГ) 1, подключенньй к адресному счетчику (АС) 2, выход которого соединен
и 10, а иди 6 через усилитель мощности (УМ) 11 соединен с намагничивающей обмоткой испытуемого ферромагнитного образца (0) заземленной через
образцовое сопротивление 12 и подключенной к первому входу вольтметра 10, а первый вход вольтметра 9 через интегратор (И) 13 соединен с заземленной измерительной обмоткой испытуемого образца, выходы ЦВ 9 и 10 через модуль привязки цифровых измерительных приборов (МП) 14 подключены к к выходу на сопряжение ЭВМ 15, которая через подсистему ввода-вывода дискретной информации (ПВВ) 16, реализованной на базе пяти стандартных модулей, подключена к управляемому входу УГ 1, входу принудительной установки адреса АС 2 и информационным входам ОЗУ
3 - 5.
УГ 1 служит для синхронизации ра-. боты схемы в процессе измерения и изменения состояний АС 2, ЭВМ 15 управляет включением и выключением УГ 1 и
установкой частоты генерируемых им импульсов, которая производится в зависимости от требуемой частоты пере- магничивания.
50
5
ет в режиме суммирования. С целью принудительной установки адреса при записи информации в ОЗУ из ЭВМ счетчик работает в режиме записи параллельного кода от ЭВМ,
ОЗУ 3 - 5, предназначены для записи в них, хранения и воспроизведения информации о форме кривых, ЦА11 6 8 - для преобразования закодированной информацииа поступающей из ОЗУ в аналоговые сигналы, УМ 1 1 - д.пя получения сигнала, достаточного д:г1я на- магничивания образца в переменном поле, интегратор 13 - для получения сигнала, пропорционального индукции поля в образце, ЦВ 9 и 10 - для измерения действующих значений сигналов разности между одноименньми сигнал:а- ми компенсируемого и компенсирующего Напряжений, устройство 14 сопряже Ния - для связи ЦВ 9 и 10 с ЭВМ, ЭВМ 15 - для реализации алгоритма
вычисления и управления блоками устройства, устройство 16 сопряжения для связи УГ 1, АС 2 и ОЗУ 3 - 5 с ЭВМ.
При включении УГ 1 состояние АС 2 изменяется периодически с периодом 2 Тцг, где п - количество разрядов АС 2; Туг период импульсов, поступающих с УГ, Следовательно, адрес ячейки ОЗУ-, код на выходе ОЗУ и на- прянения на выходах ЦАП изменяются периодически. На входы ЦАП 6-8 сигналы поступают одновременно, причем на вход ЦАП 6 - код сигнала косинусо- идального режима перемагничивания| на
к
вход ЦАП 7 - код сигнала Ug(t), на
Вход 1Ш 8 - код сигнала U (t). Прон
идя через ЦАП 6-8 сигналы, преобразованные в аналоговую форму, поступают соответственно на УМ 1I и вторые нходы ЦВ 9 и 10, С УМ П сигнал, до- статочньй для намагничивания торой-, дального образца в переменном nonej, поступает на его намагничивающую об1-:ЮТКу,
Первьй сигнал компенсируемого напряжения U(t) пропорциональный напряженности магнитного поля, снимает- с я с образцового сопротивл ения 12 и поступает на первый вход ЦВ 10, Второй сигнал компенсируемого напряжения Ug(.t), пропорц иональньй индукции магнитного поля, снимается с измерительной обмотки образца и через интегра- тор 13 поступает на первьй вход ЦВ 9
На выходах ЦВ 9 и 10 появляются сигГР
налы действуюпщх значений U и U ,
:игналов разности Up,(t) U.(t) u Ct).
-Ue (t) ) U,(t)
Запись информации в ОЗУ 3 - 5.производится через ПВВ 16 и АС 2, причем в ОЗУ 3 хранится информация о требуе- мэм режиме перемагничивания образца (не изменяется в процессе компенсации) , в ОЗУ 4 и 5 - информация о комI к
пёнсирующих сигналах U,.(t) и U,.(t)
оп
соответственно (перед началом компенсации туда з аписываются нули),
После заполнения всех ячеек памяти ОЗУ 3 - 5 ЭВМ через ПВВ 16 выдает команду на включение УГ I. На выходах ЦВ 9 и 10 появляются действующие значения Ug и и , сигналов компенсируемого напряжения, так как сигналы комС k
пенсйруюпего напряжения U (t) и
f U(t) равны нулю. Эти действуюпще
значения фиксируются в памяти ЭВМ, Затем ЭВМ записывает в ОЗУ 4 и 5 ко- ды, соответствующие сигналам компенIj(jf
сирующего напряжения Ug (t) и,
к U|..g(t). Сформированным путем добав|хления к сигналам U..(t) и U..(t) (нуле13
гармоник U
синусоидальных состав.«
615
(t) И
и g(t) с произвольно выбранными значениями амплитуд А( и С , соответственно, и определяет действующие
чения Ug.g и этих составляющих
и фиксирует их. После этого измеряютР«- fft ся действующие значения Ug и и„
р. сигналов разности Ug,.(t) Ug(t) ),(t)- u,(t) - ),
которые также фиксируются в ЭВМ. Затем по формуле (2) определяются действующие значения Ug и сигналов синусоидальных составляющих первых гармоник, соответствующие минимальным значениям погрещностей компенсации, а также соответствующие им амплитуды А и С, этих составляющих. Далее ЭВМ окончательно формирует ком k к
пенсирующие сигналы и„ (t) ии g(t)
уравновешенные с сигналами Ue(t) и
U)(t) по синусоидальным составляющим первых гармоник, путем добавления к
и(;
сигналам U..(t) и U.(t) нулевых сигнаи
лов синусоидальных составляющих первых гармоник с амплитудами А и С/ записывает сформированные сигналы в ОЗУ 4 и 5 и определяет компенсации
; р
и и при уравновешивании сигналов Ug(t) и U,(t) компенсирующими
k сигналами Ug (t) и (t). После
этого начинается aнaJIOгичный описан- ному процесс компенсации по косинусо идальным составляющим первых гармоник , При этом дпя определения действующих значений . и Uj, сигналов этих составляющих, соответствующих минимальным значениям погрешностей компенсации, в качестве действующих значений и. и Uu используются дейст Р р вующие значения и U,g сигналов
Р Р разности и (t) (.t), а в качеI/v
стве сигналов Ug(t) и U(t) сигналы
) и UH,s(t).
Дальнейшее формирование компенси-
V if
рующих сигналов UgCt) и ) осущесвляется путем их поочередного уравновешивания с сигналами UgCt) и U(t
по синусоидальным и косинусоидальным .составляющим последующих нечетных гармоник аналог.ично, описанному.
Завершится процесс компенсации, когда после добавления очередной со- ставляющей i-й гармоники к текущему формирующему компенсирующему сигналу
1 К
U.,(t) (U.,(t)) погрешность компенсации о
(действующее значение Ug- () сигна
Р Р
ла разности U-, (t)(U--(t)) станет Ь)
меньше погрешности ее измерения или, когда будет проведено уравновешивани по всему задаваемому максимальному числу п гармоник.
После завершения процесса компенг сации на двухкоординатном самопксце, подключенном к ЭВМ, производится регистрация динамической петли гистерезиса по сформированным в процессе компенсации сигналам компенсирующего
Кк
напряжения Uo-Ct) и U..;(t).
Формула изобретения
Способ определения динамических петель гистерезиса ферромагнитных материалов, включающий формирование сигналов компенсирующего напряжения
кk
Ug(t) и U(t), пропорциональных одноименным сигналам индукции Ug(t) и напряженности магнитного поля U(t) компенсируемого напряжения, в виде суммы синусоидальных и косйнусоидаль- ных сигналов составляющих гармоник с частотами, кратными частоте перемаг- ничивания:
К Ug(t) 2-(А; sin iUt + В,- cos iot)
.U(c) (С, sin iot+D;cos iCOt),
где C0 ZT-f;
f - частота перемагничивания; Aj, &;, C, D| амплитуды составляющих гармоник компенсирующего напряжения;
п - максимальное число гармоник, компенсацию сигналов Ug(t) и U(,(t)
Uк
одноименными сигналами Ug(t) и Uf(t).
проводимую добавлением к сигналу компенсируюгдего напряжения и„, (t)
Г
U|.(t) , соответствующему числу
гармоник (i-1) генерируемых составляющих сигнала i-й гармоники, и определение погрешности компенсации в виде действующего значения u , , ( )
6 (
сигнала разности
; (t)
vt) - Uei(t) и;. )- uJi.Ct)
между одноименными сигналами компенсируемого и компенсирующего напряжений, регистрацию динамической петли гистерезиса по полученным сигналам компенсирующего напряжения, о т л и- чающийся тем, что, с целью повыпения производительности определения динамических петель гистерезиса, формируют сигнал для каждой составля
If г т й)щей i-й гармоники U., (t) . U,,-(t)
ч B( L. п J
е..произвольно выбранной амплитудой
Р .) в диапазоне значений ампли- 5
туд измеряемых сигналов, суммируют сигналы Ug./t) u|;;.,(t) и utj(t)
149759612
зьшающих действующие значешия измеряемых сигналов;
(,1
(С,) -(4;) -()
t°:,(«
и
для получения вспомогатель- ю
Hi
ного сигнала компенсирующего напряжеV4- Г К 1 ния Ugj (t) I Uj,;(t)j, вычитают сигнал
k )b г к f 1 iJg. (t) U(j (t) из сигнала компенси| уемого напряжения Ug(t) ,(t)J дая получения вспомогательного сигнала
разности u g(t) Up(t) - UB(t)
и
и
i
р
Hi
..) - uS,
uj,(t) U(t) - u|5(t) , определяют20p-,
„ , /„ ч где и.. .(Up; ,}- действующее значение действующее значение ид}(иц{) и ам-ei-i L Hi-iJ
йлитуду Pg;(PK) соответствующую од- Йой из амплитуд А4 (Cj), В.- (D;) сиг- йала составляющей i-й гармоники компенсирующего напряжения, соответствующие мш{имальному значению:погрешно- Сти компенсации, генерируют сигнал составляющей i-й гармоники с амплитудой
25
сигнала разности, со соответствующее минимальному значению погрешности компенсации, полученной после уравновешивания по составляющей „ -|(i-l)-й гармоники;
РО; (PU;) и суммируют его с сигналом
30
V Р k 1
и,, (t) Uu;,(t) ДЛЯ получения окон- Bi-t L J
чательного сигнала компенсирующего
кГ к Т
напряжения Ug. (t) (t) , заканчивают щюцесс компенсации, когда после 35 добавления очередной составляющей i-й гармоники погрешность компенсации
р Р Un|(Uf,) ртанет меньще погрешности ее с
40
el J действующее значение сигнала составляющей i-й гармоники с произвольной амплитудой
Pg, ( ) (можно вычислить как Ufci
р Г . 1 - и . - ш L rn HI n П
- действующее значение вспомогательного
Р«- Р ,)
измерения или при использовании всех П гармоник, причем действующее значение Ug, (и„;), амплитуду Pg; ( ) и поР Р грешность компенсации U. (II.,;) опре-.,
BI «1а действующие значения сигналов полуделяют из Следующих соотношений,, свя- 5
сигнала разности
(«
DHttt),
чают в процессе компенсации.
(С,) -(4;) -()
и
Hi
..) - uS,
где и.. .(Up; ,}- действующее значение ei-i L Hi-iJ
5
0
5
с
0
сигнала разности, со- соответствующее минимальному значению погрешности компенсации, полученной после уравновешивания по составляющей „ -|(i-l)-й гармоники;
el J действующее значение сигнала составляющей i-й гармоники с произвольной амплитудой
Pg, ( ) (можно вычислить как Ufci
р Г . 1 - и . - ш L rn HI n П
- действующее значение вспомогательного
Р«- Р ,)
сигнала разности
(«
DHttt),
чают в процессе компенсации.
Фиг.1
7
АС
гИ
r-V
.2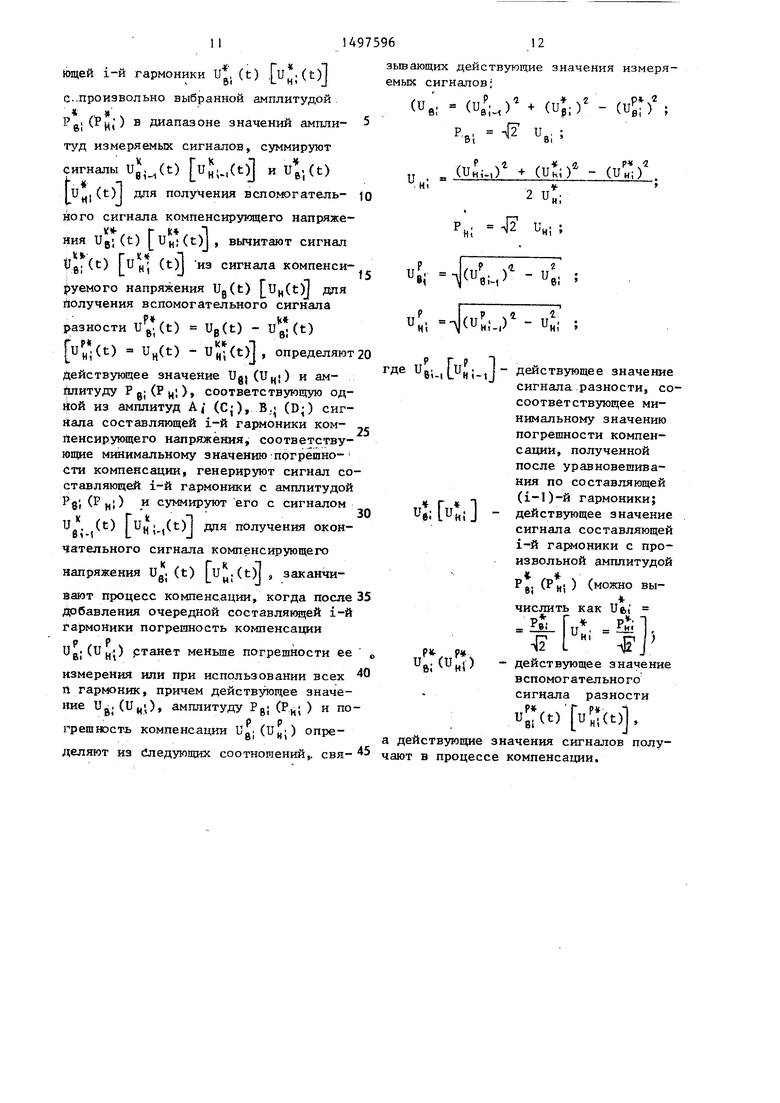
| Устройство прогнозирования работоспособности радиоэлектронной аппаратуры | 1984 |
|
SU1264116A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
