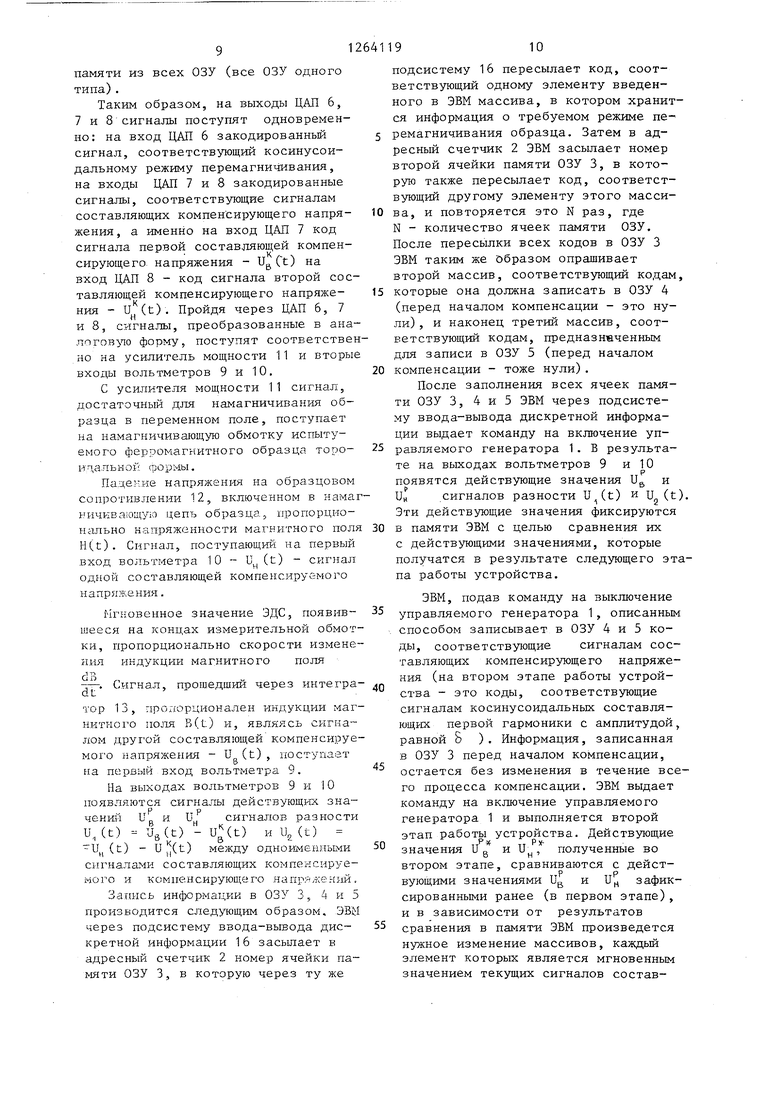
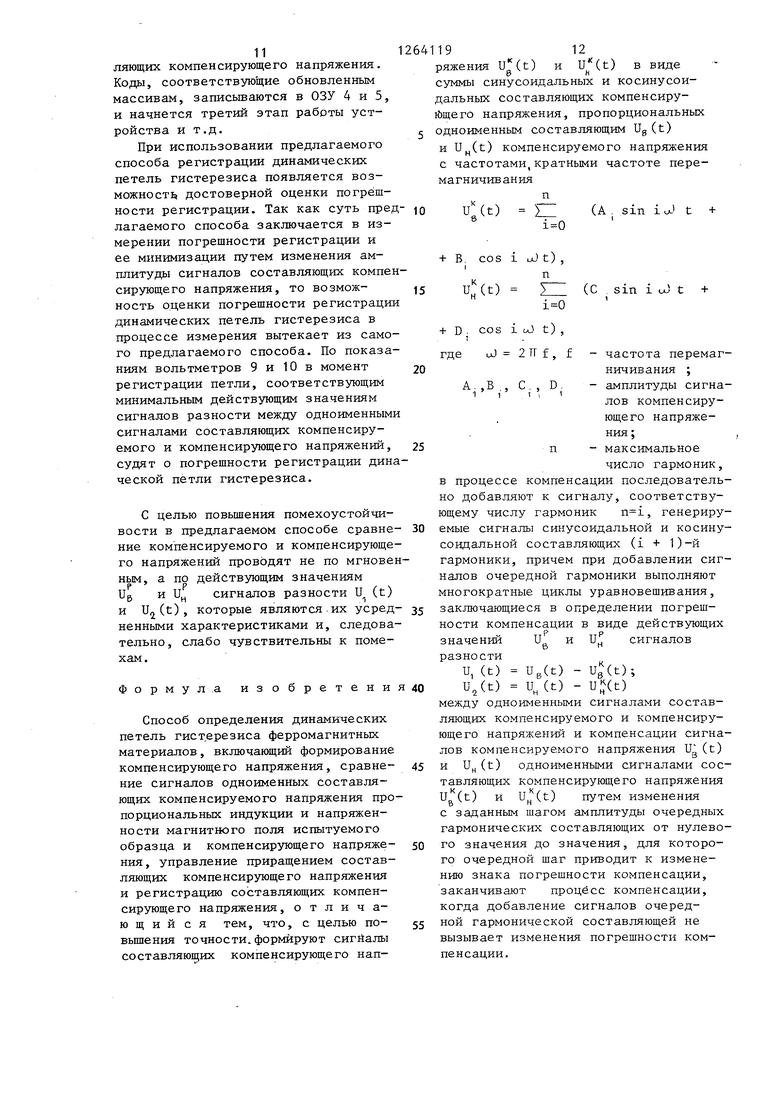
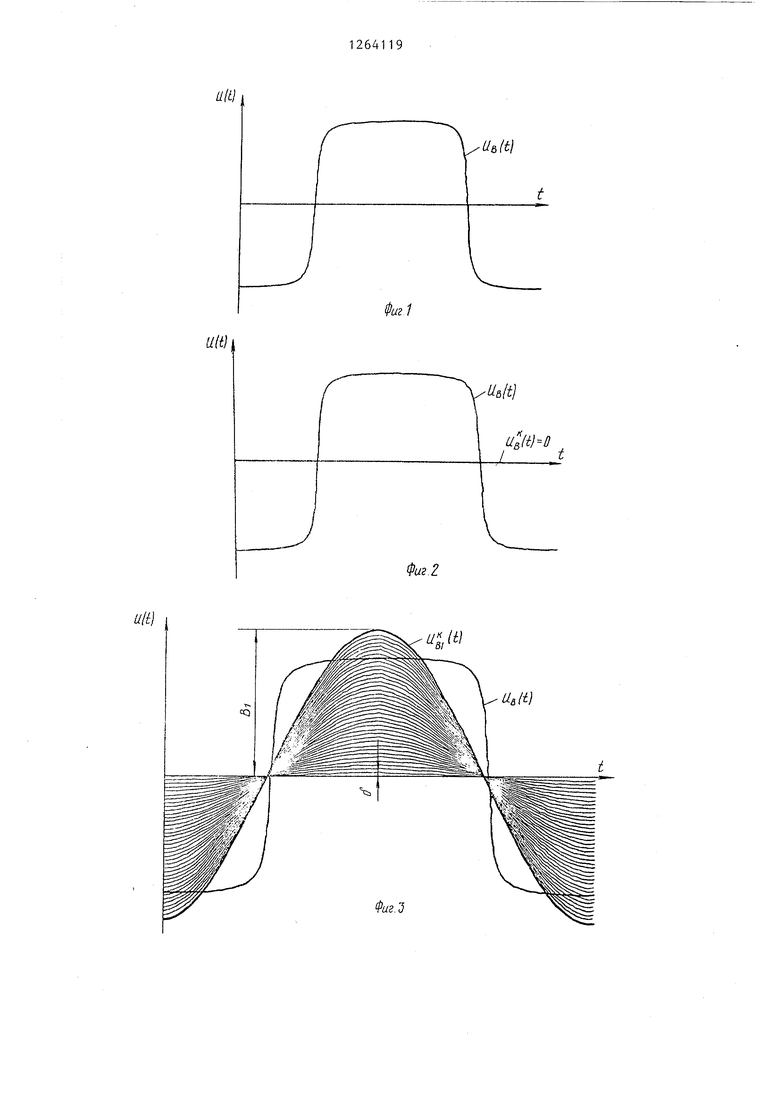
1 Изобретение относится к магнитным измерениям и может быть использовано для автоматизированного определения динамических петель гистерезиса. Целью изобретения является новышение точности регистрации динамиче ких петель гистерезиса ферромагнитных материалов. Для достижения дели в известном способе регистрации динамических пе тель гистерезиса, заданных в прямоугольной системе координат в виде переменных электрических напряжений пропорциональных индукции и напряженности магнитного поля испытуемого ферромагнитного образца, включающем операции формирования компенсирующего напряжения, сравнения сигналов одноименных составляющих компенсируемого и компенсирующего напряжений, управления приращением сигналов составляющих компенсирующего напряжения и регистрации динамической петли гис терезиса по сигналам составляющих компенсирующего напряжения, уравновешенным с сигналами одноименных составляющих компенсируемого напряжения, формирование сигналов составляющих компенсирующего напряжения Ug (t) и и(t) производят в виде СУММ1-1 синусоидальных и косинусоидаль ных сигналов, когерентных сигналам составляющих компенсируемого напряжения и (t) и и(t) с частотами, кратными частоте перемегничивания (сигналов гармонических составляющих) и„ (t) 4-. (А . sin iu3 t + 6 1 + В , COS i 1лЗ t) ; n U (t) I (C . sin ioOt + + D. cos iuJ t) , где bJ 2 IT f , f - частота перемаг ничивания; A., В. , Cj , D| - амплитуды сигна лов гармонических составля- К1ЩИХ сигналов к пенсирующего на ряжения ,определяемые в проце се компенсации п - максимальное число гармоник i О, п - номер гармоник 192 сравнение сигналов одноименных составляющих компенсируемого и компенсирующего напряжений осуществляют путем нахождения погрешностей компенсации, определяемых действующими р р значениями Ug, и U сигналов разности и (t) Ug(t) - U(t) и U2(t) U,,(t) - и (t) между одноименными н н сигналами составляющих компенсируемого и компенсирующего напряжений, компенсацию сигналов составляющих компенсируемого напряжения осуществляют их последовательным уравновешиванием по синусоидальным и косинусоидальным сигналам гармонических составляющих компенсирующего напряжения, проводимым путем изменения амплитуд сигналов гармонических составляющих от нулевого значения до значения, соответствующего минимальной величине погрешности компенсации, процесс компенсации проводят путем выполнения многократных циклов уравновешивания, совершаемых при каждом добавлении к текущим сигналам ) и 11 (t) генерируемых сигналов синусоидальных и косинусоидальных составляющих очередной гармоники, заканчивают процесс компенсации, когда добавление сигнала очередной гармонической составляющей не вызывает изменения погрешности компенсации, превьш1ающего погрешность ее измерения, т.е. производят минимизацию погрешности компенсации до допускаемого данным способом предела, а перед каждым уравновешиванием сигналов и„(t) и (t) по гармоническим составляющим, определяют действующие значения Ug и и„ сигналов разности и (t) и Ug (t) при нулевой амплитуде сигнала очередной составляющей и сравнивают их с действующими значениями Ug и и сигналов разности и (t) и U(t) при амплитуде сигнала этой составляющей, равной выбранному значению шага приращения, и если U u Вв ип то амплитуду сигнала гармонической составляющей наращивают с выбранньс шагом, в противном случае - уменьшают с тем же шагом. На фиг. 1-10 изображены временные диаграммы компенсируемых и компенсирующих сигналов на промежуточном этапе компенсации; на фиг. 11 - динамическая петля гистерезиса, зарегистрированная по окончании процесса компенсации по сигналам составляющих компенсирующего напряжения; на фиг. 12 - обобщенная структурная схема устройства, реализующего предлагаемьш способ. Сущность способа определения дина мических петель гистерезиса заключается в следующем. Сигналы первых сос тавляющих компенсируемого и компенси рующего напряжений U(.t) и Ug(t) пропорциональны индукции магнитного поля испытуемого образца, а сигналы вторых составляющих компенсируемого и компенсирующего напряжений U(t) и ) пропорциональны напряженноети магнитного поля образца.. Рассмотрим процесс компенсации на примере сигнала Ug(t) при косинусоидальном режиме премагничивания образца(и (t) и cos 2ТТ ft,где f - частота перемагничивания, UHT амплитуда сигнала, пропорционального напряженности поля. Сигналы U(t), характерный для данного закона перемагничива ния, показан на фиг. 5. В этом случае отсутствует постоянная составляющая сигнала и четные гармонические составляющие. 1.В процессе перемагничивания об разца определяют действующее значение Ug сигнала разности U (t) Ug(t) - U(t) между одноименными сиг налами первых составляющих.компенси руемого и компенсирующего напряжени при равенстве нулю сигнала первой со та: ляющей компенсирующего напряжени Ug(t) фиг. 2).Это действующее значе ние фиксируют. 2.Начинают формирование сигнала первой составляющей компенсирующего напряжения U (t). Для этого генерируют косинусоидальньш сигнал, когарентньй одноименному сигналу компенсируемого напряжения U (t), с шагом 6 приращения амплитуды (т.е. сигнал косинусоидальной составляющей первой гармоники) Ug(t) iS.cos 2 ТТ f (фиг. 3), где f 8 6 2, погрешность измерения действующего сигнала разности U,(t значения 3.Определяют действующее значение Ug сигнала разности Ц (t) , в котором в качестве сигнала компенси рующего напряжения U (t) использую сигнал, полученньш в ,п. 2. Это действующее значение фиксируют. 4.Сравнивая действующее значени полученное в п. 3, с действующим значением U, зафиксированным ранее (п. 1), определяют разностньш сигнал 5.Если разностный сигнал ди„ (п. 4) больше нуля, то амплитуду сигнала первой составляющей компенсирующего напряжения U (t) (п. 2) наращивают путем осуществления приращений с шагом S , в противном случае уменьшают с тем же шагом. 6.Произведя выбор направления осуществления приращений (п. 5), сигнал первой составляюшей компенсирующего напряжения U(t) , полученный в п. 2, формируют в виде uVt) (5 +S ) cos 211 f t (фиг. 3). 7.Определяют действующее значение IL° сигнала разности U, (t), в котором в качестве сигнала первой составляющей компенсирующего напряжения и (t) используют сигнал, полученный в п. 6. 8.Сравнивания действующее значение Ug° (п. 7) с зафиксированным ранее (п. 3) действующим значением и т,р -ттр 11 р; определяют разностный сигнал F;-, U Uc, - Un Up, в & 9. Если разностный сигнал ди, (п. 8) больше нуля, вновь производят требуемое изменение (наращивание или уменьшение) амплитуды формирующегося сигнала Uj5(t) с шагом 5 мплитуду сигнала (t) продолжают изменять с шагом 5 с шагом до тех пор, ди не пока разностньш сигнал станет меньше нуля, т.е. до тех пор, пока действующее значение сигнала разности, определенное при очередном изменении амплитуды сигнала и (t) на величину 5 , не превысит действующего значения сигнала разности, определенного при ее предыдущем изменении на ту же величину. Следовательно, определив направление осуществления приращений амплитуды сигнала первой составляющей компенсирующего напряжения Ug(t) (п. 5), уравновешивают этот сигнал с одноименным сигналом компенсируемого напряжения U (t) по косинусоидальной составляющей первой гармоники путем осуществления приращений амплитуды сигнала Ug(t) с шагом S в выбранном направлении. В результате этого амплитуду В сигнала Ug(t) , полученного в результате уравновешивания сигнала UJ(t) с сигналом ПО косннусоидальной составляющей первой гармоники, устанавливают такой (фиг. 3), йри которой действующее значение U сигнала разности и (t) между одноименньми сигналами первых составляющих компенсируемого и компенсирующего напряжений минимально.
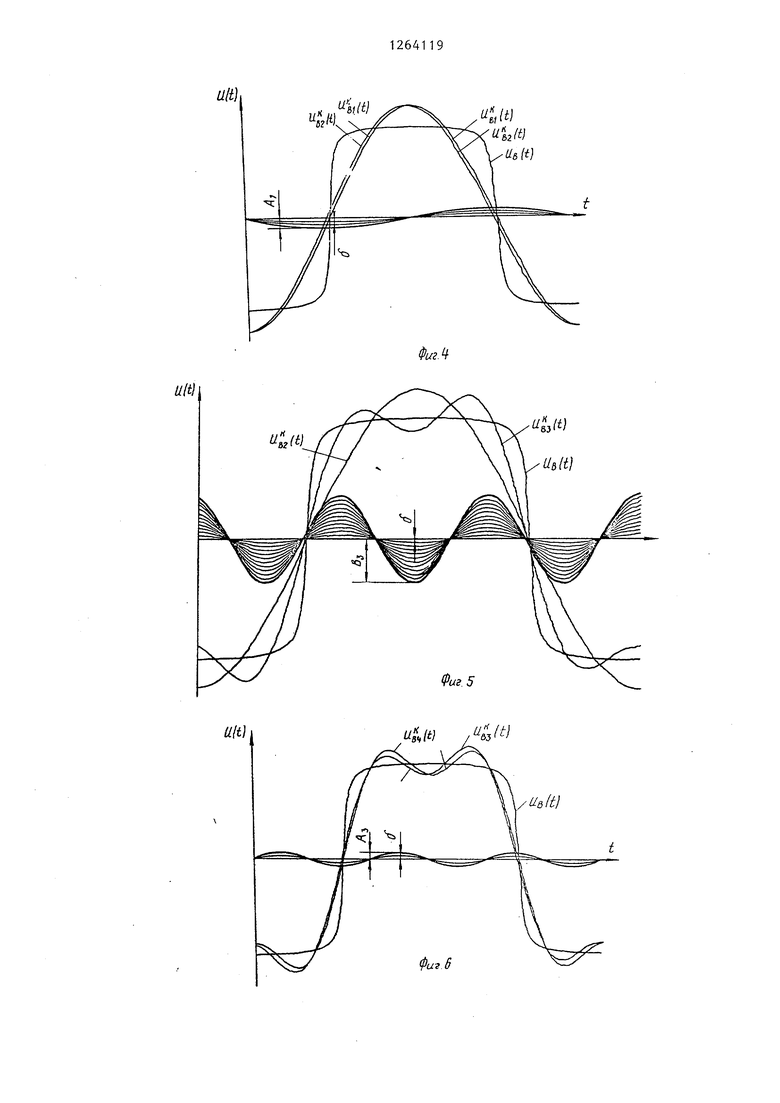
10. Продолжают формирование сигнала первой составляющей компенсирующего напряжения Ug(t). Для этого генерируют сигнал синусоидальной составляющей первой гармоники с амплитудой, равной S, и добавляют его к уравновешенному ранее (п. 9) сигналу Ug(t) (фиг. 4)
( и (t)
sin 2ТГ f t.
11. Производят уравновешивание
J(t) , полученного в п. сигнала U,(t), полученного в п. 10 с сигналом p,(t) по синусоидальной составляющей первой гармоники путем, аналогичны- описанному для уравновешивания по косинусоидальной составляющей первой гармоники (п.п. 3-9), т.е. изменяют амплитуду сигнала синусоидальпой составляющей первой гармоники с iHd. о в выбранном иаправтгекии .л а -кпол;, услози;; , оиксан-HoiO i; п. 9, усчанавливал ее равной Л, (ф1а , О- При этом ггс;луч:ают сигнал Ug (t,) , уравновеиенкьш ;го ггервой гармонике.
12.. Генерируют сигнал косинусоидальной составляющей третьей гармоник) о амплитудой, равной с;, и добай..|Яьгч его к получившемуся в резуль ач-:я по сигка.11у
и: (t)
+ S cos 3 2 ir f t.
13.Уравловсшшпит сигнал U4t:) (п. 12) с сигналом к аналогнчъым описанному R п.п, 3 - 9 путем,
в результате амплитуду си1нала косинусоидальной состя.о.шЕТ1);1ей третьей гармоники усталая ЛИВ тот равчоь В (фиг. 5) и при этом получают сигнал Ugj (t) ., уравнозе.шен.ньк по пер-гюй гармонике и косинусоидальной cociавляющей трегъей гармоникр;,.
14.Генерируют сигнал сянусои-дальной составляющей третье; гггрмс.ники с ами.)1Игудой, равной б л добавляют его к уравнозе.;ае1-{ному ранее
(п. 13) сигналу -ч|(ь) (фиг. 6)
Ug(t) и.: (t) + В sin 3 2И f с.
15.Уравновешивают получившийсгг сигнал Uf,(t) (п. 14) аналогичным
описанному путем, в результате амплитуду сигнала синусоидальной составляющей третьей гармоники устанавливают равной А (фиг. 6) и при этом
получают сигнал U(t), уравновешенный по двум гармоникам - первой и третьей.
16. Поочередно генерируют сигналы косинусоидальной и синусоидальной
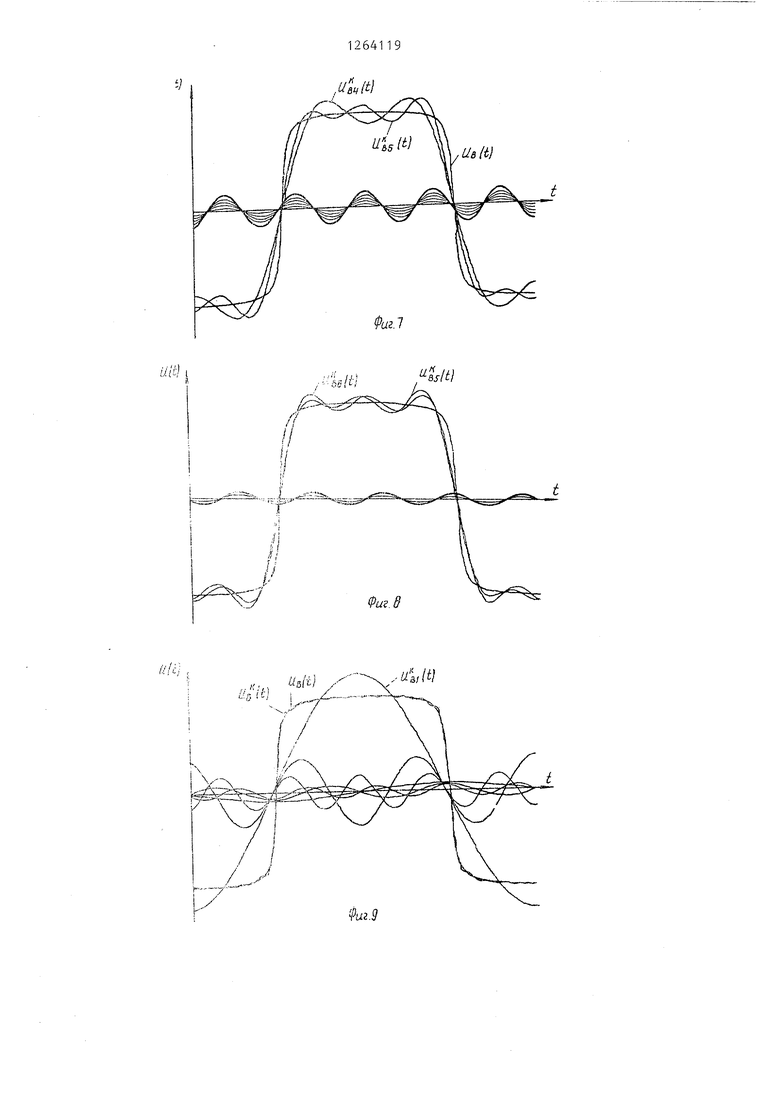
составляющих пятой гармоники с амплитудой S . Поочередно добавляют их к уравновешенному ранее (п. 15) сигналу Ug (t), производя уравновешивание получающегося при каждом добарлении формирующего сигнала U(t). В результате этого получают сигнал и (t) (фиг. 7), уравновешенный по первой, третьей и косин ч:оидальной гармонической составляющей пятой
(t) (фиг. 8)
гармоникам, и сигнал
уравновешенный по трем гармоникам (первой, третьей и пятой).
17.Процесс компенсации, состоящий из многократных циклов уравновешивания, совершаемых при каждом добавлении к текущему формирующемуся сигналу Ug(t) генерируемых сигналов косинусоидальных и синусоидальных составляющих очередной гармоники закончится тогда,когда добавление составляющей очередной гармоники не вызывает такого изменения погрешности компенсации,определяемой действующим значением U сигнала разности U (t), которое превышает погрешность ее измерения - Уу .
По окончании процесса компенса.ции получают сформированньш сигнал первой составляющей компенсирующего напряжения Ug(t) (фиг. 9).
Компенсация сигнала второй составляющей компенсируемого напряжения и, (t) сигналом одноименной составляющей компенсирующего напряжения U(t) производят одновременно с описанной (п.п. 1-17) компенсацией сигнала первой составляющей компенсируемого напряжения аналогичным образом
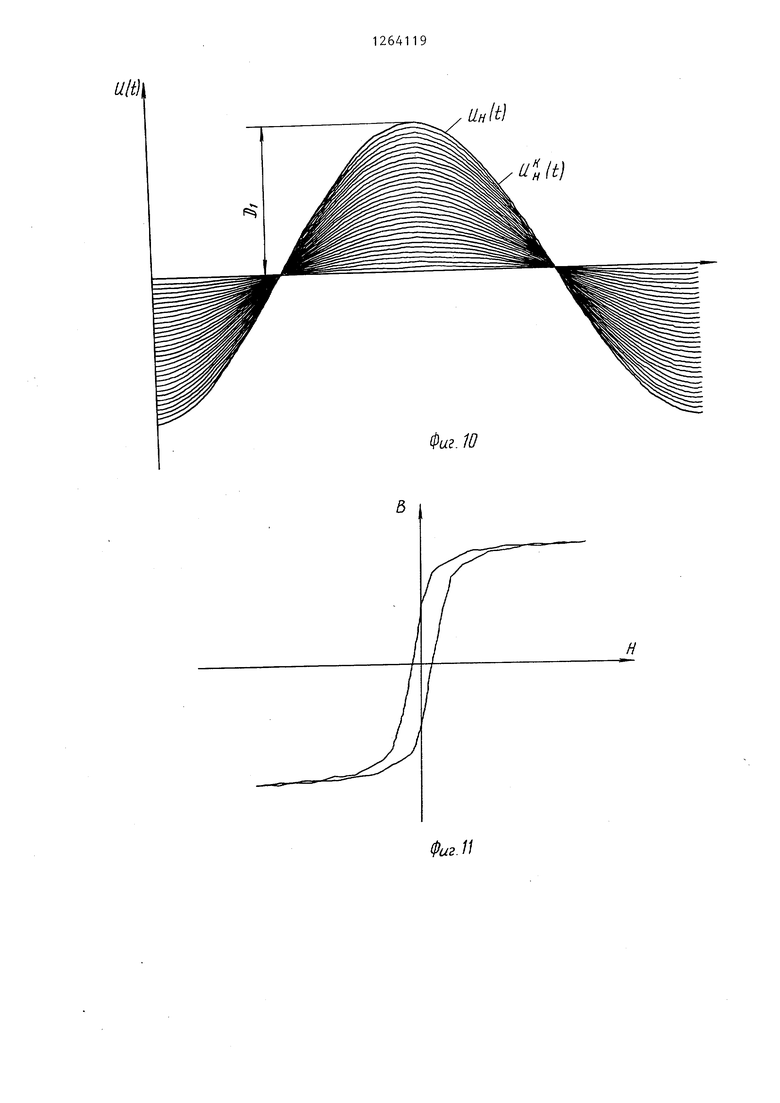
Для сигнала ), характерного заданному режиму перемагничивания, процесс ком.пенсации завершится после уравновешивания этого сигнала по косинусощ1,альной составляющей первой гармоники, в результате которого амплитуду сигнала U(t) устанавливают равной D,| (фиг. 10).
18.После завершения процесса компенсации производят регистрацию
динамической петли гистерезиса по сформированным в процессе компенсации сигналам составляющих компенсирующего напряжения U(t) (фиг. 9) и и(t) (фиг. 10, которые уравновешены с одноименными сигналами составляющих компенсируемого напряжения (фиг. 15).
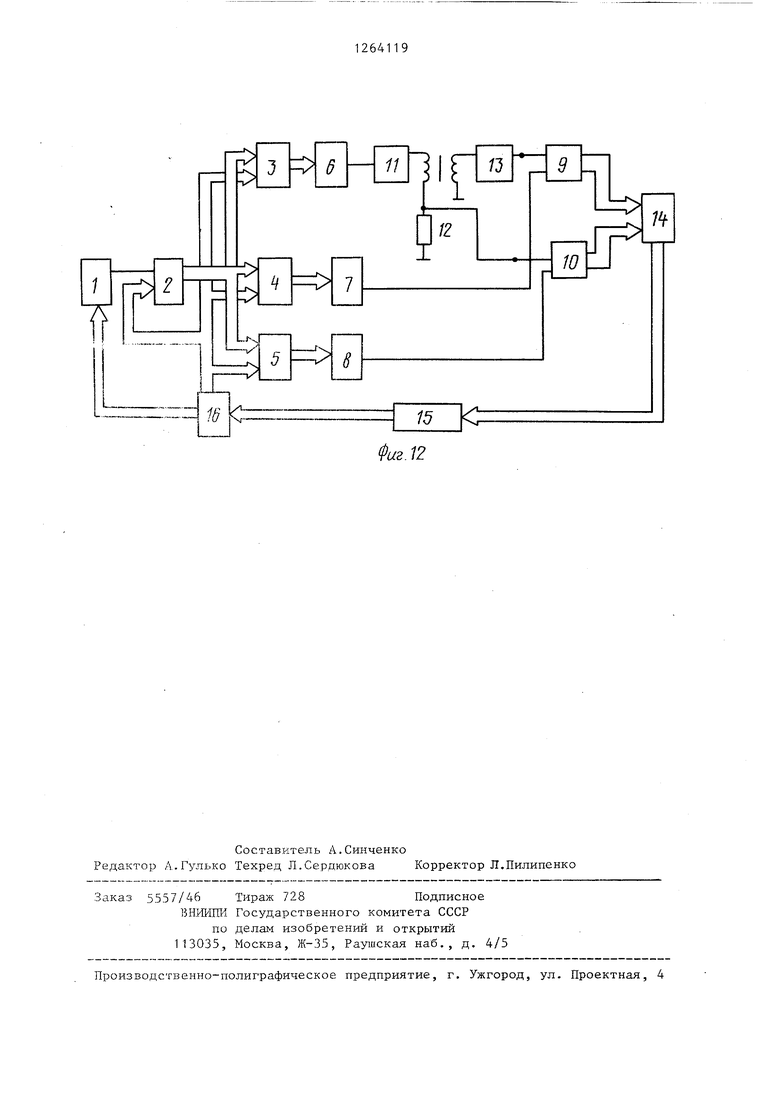
Обобщенная структурная схема для осуществления предлагаемого способа (фиг. 12) содержит управляемый генератор (УГ) 1, подключенньй к адресному счетчику (АС) 2, выход которого соединен с адресными входами оперативных запоминающих устройств (ОЗУ) 3, 4 и 5, а они, в свою очередь, подключены к цифроаналоговым преобразователям (ЦАП) 6, 7 и 8 соответственно. Выходы ЦАП 7 и 8 соединены с вторыми входами цифровых вольтметров (ЦБ) 9 и 10, а ЦАП 6 через усилитель мощности (УМ) 11 соединен с намагничивающей обмоткой испытуемого ферромагнитного образца, заземленной через образцовое соп ротивление 12 и подключенной к первому входу вольтметра 10, а первый вход вольтметра 9 через интегратор (И) 13 соединен с заземленной измерительной обмоткой испытуемого образ ца. Выходы вольтметров 9 и 10 через модуль привязки цифровых измерительных приборов (МП) 14 подключены к выходу на сопряжение ЭВМ 15, которая через подсистему ввода-вывода дискретной информации (ПВВ) 16, реализованной на базе пяти стандартных модулей, подключена к управляемому входу генератора 1, к входу принудительной установки адреса счетчика 2 и к информационным входам ОЗУ 3, 4 и 5.
Управляемьй генератор 1 служит для синхронизации работы схемы в процессе измерения и изменения соетояний счетчика адреса 2. ЭВМ 15 управляет включением, выключением генератора 1 и установкой частоты генерируемыхим импульсов, которая производится в зависимости от требуемой частоты перемагничивания.
Адресный счетчик 2 - п-разрядный двоичньй суммирующий счетчик с возможностью предустановки - предназначен для задания адреса на все ОЗУ. С каждым приходом импульса с выхода управляемого генератора 1 адресный счетчик 2 увеличивает свое
состояние на 1 (адрес изменяется на 1), т.е. работает в режиме C TVIмирования. С целью принудительной установки адреса при записи информации в ОЗУ из ЭВМ счетчик работает в режиме записи параллельного кода от ЭВМ.
ОЗУ 3, 4 и 5 предназначены для записи в них, хранения и воспроизведения информации о форме кривых, ЦАП 6, 7 и 8 - для преобразования закодированной информации, поступающей из ОЗУ, в аналоговые сигналы усилитель мощности 11 - для получения сигнала, достаточного для намагничивания образца в переменном поле интегратор 13 - для получения сигнала, пропорционального индукции В поля в ферромагнитном образце.
Цифровые вольтметры 9 и 10 исползуют для определения де;1ств тощих знчений сигналов разности между одноименными сигналами составляющих компенсируемого и компенсирующего напржений, устройство сопряжения - для связи вольтметра 9 и Ю с ЭВМ 15, ЭМВ 15 - для реализации алгоритма вычисления и управления блоками устройства.
Устройство сопряжения предназначено для связи управляемого генератора 1, адресного счетчика 2 и ОЗУ 3, 4 и 5 с ЭВМ 15.
При включении управляемого генератора 1 от ЭВМ на адресный счетчик 2 начнут поступать периодические импульсы, вследствие --jero с приходом калодого и шульса счетчик наращивает свое состояние на 1. Причем каждому состоянию счетчика адреса соответствуют определенные ячейки памяти ОЗУ 3, 4 и 5.
Состояние адресного счетчика будет изменяться следующим образом: О, 1, 2,..., 2 - 1, О, 1, 2,..., 2 -,1,0,1,2.. .,т.е.периодически с периодом 2 Т , , где и - количество разрядов адресного счетчика; Т период импульсов, поступающих с управляемого генератора. Следовательно, периодически будет изменяться код на выходах ОЗУ, а также и напряжения на выходах ЦАП.
Так как адресные входы всех ОЗУ объединены и питаются от одного счетчика, то в каждьш момент времен воспроизводится одна и та же ячейка памяти из всех ОЗУ (все ОЗУ одного типа). Таким образом, на выходы ЦАП 6, 7 и 8 сигналы поступят одновременпо: на вход ЦАП 6 закодированньй сигнал, соответствующий косинусоидальному режиму перемагничивания, на входы ЦАП 7 и 8 закодированные сигналы, соответствующие сигналам составляющих компенсирующего напряжения, а именно на вход ЦАП 7 код сигнала первой составляющей компенсирующего напряжения - U Ct) на вход ЦАП 8 - код сигнала второй сос тавляющей компенсирующего напряжения - U,(t). Пройдя через ЦАП 6. 7 и 8, сигналы, преобразованные в ана логов упо форму 5 поступят соответстве но на усилитель мощности 11 и вторы входы вольтметров 9 и 10. С усилителя мощности 11 сигнал, достаточный для намагничивания образца в переменном поле, поступает на намагничивающую обмотку испытуемого ферромагнитного образца тороипальной формы. Падение напряжен1-1я на образцовом сопротивлении 12, включенном в нама ничивающую цепь образца, пропорционально напряженности магнитного пол H(t). Сигнал, поступающий на первый вход вольтметргг 10 - (t) - сигнал одной составляющей компенсируемого напря кения. Мгновенное значение ЭДС, появившееся на концах измерительной обмот ки, пропорционально скорости измене индукции магнитного поля Сигнал, прошедший через интегра тор 13, пропорционален индукции маг нитт-юго поля B(t) и, являясь сигналом другой составляющей компенсируе мого напряжения - U (t), поступает на первый вход вольтметра 9. На выходах вольтметров 9 и 10 появляются сигналы действующих знаррчений Ug и И сигналов разности (t) -- Ug(t) - U4t) И и,, (t) -и„ (t) - ) между односменными сигналами составляющих компенсируемого и компенсирующего напряжений Запись информации в ОЗУ 3, 4 и производится следующим образом, ЭВМ через подсистему ввода-вывода дискретной информации 16 засылает в адресный счетчик 2 номер ячейки памяти ОЗУ 3, в которую через ту же подсистему 16 пересылает код, соответствующий одному элементу введенного в ЭВМ массива, в котором хранится информация о требуемом режиме перемагничивания образца. Затем в адресный счетчик 2 ЭВМ засылает номер второй ячейки памяти ОЗУ 3, в которую также пересылает код, соответствующий другому элементу этого массива, и повторяется это N раз, где N - количество ячеек памяти ОЗУ. После пересылки всех кодов в ОЗУ 3 ЭВМ таким же образом опрашивает второй массив, соответствующий кодам, которые она должна записать в ОЗУ 4 (перед началом компенсации - это нули) , и наконец третий массив, соответствующий кодам, предназнтченным для записи в ОЗУ 5 (перед началом компенсации - тоже нули). После заполнения всех ячеек памяти ОЗУ 3, 4 и 5 ЭВМ через подсистему ввода-вывода дискретной информации выдает команду на включение управляемого генератора 1. В результате на выходах вольтметров 9 и 10 появятся действующие значения Ug, и UH сигналов разности U(t) и и (t). Эти действующие значения фиксируются в памяти ЭВМ с целью сравнения их с действующими значениями, которые получатся в результате следующего этапа работы устройства. ЭВМ, подав команду на выключение управляемого генератора 1, описанным способом записывает в ОЗУ 4 и 5 коды, соответствующие сигналам составляющих компенсирующего напряжения (на втором этапе работы устройства - это коды, соответствующие сигналам косинусоидальных составляющих первой гармоники с амплитудой, равной S ). Информация, записанная в ОЗУ 3 перед началом компенсации, остается без изменения в течение всего процесса компенсации. ЭВМ выдает команду на включение управляемого генератора 1 и выполняется второй этап работы устройства. Действующие значения Up и U, полученные во втором этапе, сравниваются с действующими значениями Ug и U зафиксированными ранее (в первом этапе), и в зависимости от результатов сравнения в памятт ЭВМ произведется нужное изменение массивов, каждый элемент которых является мгновенным значением текущих сигналов состав11ЛЯЮЩИХ компенсирующего напряжения. Коды, соответствующие обновленным массивам, записьшаются в ОЗУ 4 и 5, и начнется третий этап работы устройства и т.д. При использовании предлагаемого способа регистрации динамических петель гистерезиса появляется возможность достоверной оценки погрешности регистрации. Так как суть пре лагаемого способа заключается в измерении погрешности регистрации и ее минимизации путем изменения амплитуды сигналов составляющих компе сирующего напряжения, то возможность оденки погрешности регистраци динамических петель гистерезиса в процессе измерения вытекает из само го предлагаемого способа. По показа ниям вольтметров 9 и 10 в момент регистрации петли, соответствующим минимальным действующим значениям сигналов разности между одноименным сигналами составляющих компенсируемого и компенсирующего напряжений, судят о погрешности регистрации дин ческой петли гистерезиса. С целью повьшения помехоустойчивости в предлагаемом способе сравне ние компенсируемого и компенсирующе го напряжений проводят не по мгнове ным, а по действующим значениям Ug и U| сигналов разности U (t) и и, (t) , которые являются их усред ненными характеристиками и, следова тельно, слабо чувствительны к помехам. Формула изобретени Способ определения динамических петель гистерезиса ферромагнитных материалов, включающий формирование компенсирующего напряжения, сравнение сигналов одноименных составляющих компенсируемого напряжения про порциональных индукции и напряженности магнитного поля испытуемого образца и компенсирующего напряжения, управление приращением составляющих компенсирующего напряжения и регистрацию составляющих компенсирующего напряжения, отличающий с я тем, что, с целью повьш1ения точности, формирую т сигйалы составляющих компенсирующего нап19ряжения U(t) и ) в виде суммы синусоидальных и косинусоидальных составляющих компенсируЛщего напряжения, пропорциональных одноименньм составляющим Ug(t) и U(t) компенсируемого напряжения с частотами,кратными частоте перемагничиванияп U(t) Г (А . sin iu-i t + + в. COS i U,(t) (C sin i jJ t + D; COS i слЗ t) , uJ 2 ТТ f , f - частота перемаггденичивания ; А,В, С, D, - амплитуды сигналов компенсирующего напряжения;п - максимальное число гармоник, в процессе компенсации последовательно добавляют к сигналу, соответствующему числу гармоник , генерируемые сигналы синусоидальной и косинусоидальной составляющих (i + 1)-й гармоники, причем при добавлении сигналов очередной гармоники выполняют многократные циклы уравновешивания, заключающиеся в определении погрешности компенсации в виде действующих значении сигналов разности и, (t) Ug(t) - u;(t); u(t) u(t) - u;(t) между одноименными сигналами составляющих компенсируемого и компенсирующего напряжений и компенсации сигналов компенсируемого напряжения U. (t) и Uj, (t) одноименными сигналами составляющих компенсирующего напряжения U.(t) и uVt) путем изменения Dп С заданным шагом амплитуды очередных гармонических составляющих от нулевого значения до значения, для которого очередной шаг приводит к изменению знака погрешности компенсации, заканчивают процесс компенсации, когда добавление сигналов очередной гармонической составляющей не вызывает изменения погрешности компенсации.
Фиг1
Li.lt
LJ
$иг2
uli
ul,ii}
i,(tl 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения динамических петель гистерезиса ферромагнитных материалов | 1986 |
|
SU1497596A1 |
| Способ параметрической компенсации циклических погрешностей привода подач станка с ЧПУ | 1986 |
|
SU1403017A1 |
| Анализатор гармоник | 1977 |
|
SU789884A1 |
| Способ формирования сигнала, калиброванного по коэффициенту гармоник | 1987 |
|
SU1451618A1 |
| Цифровой феррозондовый измеритель азимута | 1987 |
|
SU1498913A1 |
| Устройство измерения частотных характеристик группового времени запаздывания четырехполюсников | 1988 |
|
SU1631511A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ РАЗЛИЧИЙ В ЧУВСТВИТЕЛЬНОСТИ ЭЛЕМЕНТОВ МАТРИЦЫ ФОТОПРИЕМНИКОВ | 1995 |
|
RU2108685C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ТЕМНОВОГО СИГНАЛА МНОГОЭЛЕМЕНТНЫХ ФОТОДИОДНЫХ ПРИЕМНИКОВ | 1995 |
|
RU2102837C1 |
| Способ калибровки линейности цифроаналоговых преобразователей | 1989 |
|
SU1755373A1 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1541778A1 |
Изобретение относится к области магнитных измерений. Цель изобретения - повьшение точности и производительности измерений. Способ основан на минимизации погрешности компенсации, определяемой действующими значениями сигналов разности между сигналами составляющих компенсируемого напряжения, пропорциональных напряженности и индукции магнитного поля испытуемого ферромагнитного образца, и одноименными сигналами составляющих компенсирующего напряжения, которые формируют в виде суммы сигналов синусоидальных и косинусоидальных гармонических составляющих. Компенсацию проводят путем выполнения многократных циклов уравновещивания сигналов составляющих компенсируемого напряжения с одноименными сигналами Составляющих компенсирующего напряжения, соверщаемых при добавле нии сигналов гармонических составля(Л ющих, амплитуду которых при каждом уравновешивании устанавливают соответствующей минимальной погрешности компенсации. Перед каждым уравновешиванием производят выбор направления приращения амплитуд сигналов гарГС монических составляющих компенсирующего напряжения. 12 ил. о 4
Lil,ii
U.M
ej
,, i/s/t) ,
i „..
-.y- / Фиг. Ю //2W
Фиг. П
Фиг. 12
| Испытание магнитных материалов и систем /Под ред | |||
| А.Я.Шихина | |||
| М.: Энергоатомиздат, 1984 | |||
| Способ регистрации замкнутой кривой,описывающейся вектором,составляющие которого в прямоугольной системе координат заданы в виде переменных электрических напряжений | 1972 |
|
SU474745A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
