4
со
со
Изобр Ttuni . отис:г. к измерительной г е хнике и может быть использовано I-, системах управления пере- меигениями г двумя степенями свободы, например, в систе-мах дистанционного управления транспортных средств, манипуляторол с ) унрлвлепнем и т.п.
Цель тобрптения -- повышение точности опр(. Г1,елгния yi jiOBoro положения рукоятки ;Л1 1а| ления за счет испсутгьтон.-чпп эгЬфг Ктп изменения частоты ме.личчрс .(1 : о j i uniaHca ферро- резины при ее Л1-( к1рмлции.
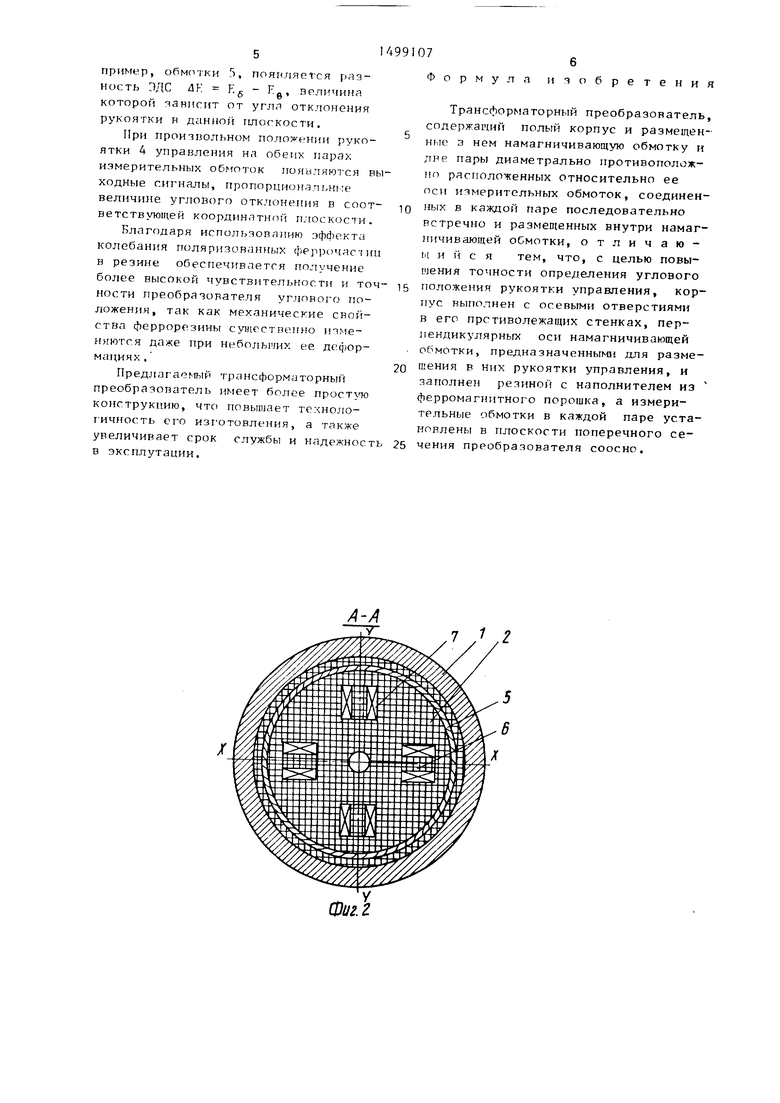
На фиг.1 показан схематично транс формат ПИ II nfioonp.) чопатель углового попож;м1ия OV-: пятки управления, про- дол1,ное сеп Ние; на фиг,2 - сечение Л-Л на фиг.1; на фиг.З - 1г.эменення выходного напряжения нре- образователя в ф/ункции частоты питания при различ)1оГ степени деформапии рез1П1Ы с ферромагнитным наполнителе
Трансформаторный нреобразователь содержит 1ГОЛЫЙ корпус I , выполненный из непроводя1 его парамагнитного материала и заполненный феррорезиной 2, которая предстатзляет собой резин с наполшпелеь) из ферромаг П1Тного пс ротчка. В двух противолежащих стенках корпуса ныполнены осевые отвер- СТТ1Я 3, через которые п епл полость введена рукоятка 4 уггравления, угло- Pioe положенпе которой в дв ух взаим }1О перпендикулярных плоскостях X и У должно быть измерено, конец рукоятки 4 соединен ч1арниряо с пент- ром нижней стенки (дзпппа) корпуса 1, а верхний конен ynpyi o снизан с его верхней стенкоГ. Внутри корнуса соосно с рукояткой 4 управления размерена намаг-ничипаюшая оймотка 5 , подключаемая в процессе измерения к источнику пнтпния (не показан). Обе пары соосно устанс Вленных измерительных обмоток 6 п 7 расположены.диа- метр-яльпо лрот иоиоложно О1носитель- но осп намагп(ЧИ и1Ю1цей обмотки 5 и соед,ииены в каждой паре последова- тельно-игтркчно, Они размещены внутри нямаг пичпвающей обмотки в массе феррор : ииы 2 н образуют в плане крестообразную структуру (фиг.2).
)рм а торный преобразователь vr.nci oi о 1оло Г Иия рукоятки управления и , взаимно перпендикулярных плоское гя - ivjriciT,if T слрдукм.цим образом ,
0
5
0
При 1П1тании намагничивающей обмотки 5 прямоугольными импульсами напряжения создается магнитный поток, под действием которого прои ходит поляризапля феррочастип в массе фер- рорсзипы 2 и возбуждаются их механические колебания. Если рукоятка 4 располагается вдоль оси Z, т.е. при отсутстрлти ее уг ловь х отклонений от вертикали в плоскостях XX и УУ, наводимые под действием колебаний il)eppo4acTvni в парах измерительных обмоток 6 и 7 ЭДС будут практически равнкл, тк-ледствие чего сигналы на выходах преобразователя по обеим координатам также равны нулю.
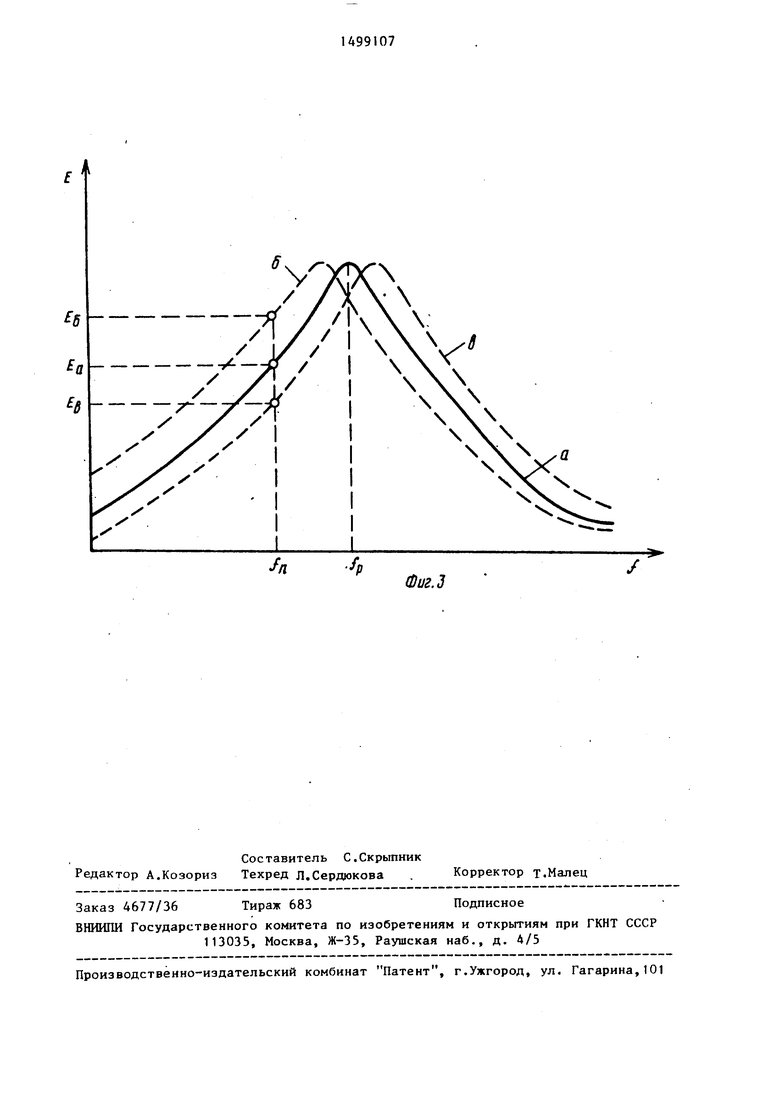
При угловом отклонении рукоятки А, напрпмер, в плоскости XX, происходят сжатие, феррорезины 2 в обл.зсти одной из измерительных обмоток 6 и ее, растяжение в области другой обмотки этой пары. Деформания ферроре- зпн1,1 под влиянием указанного меха- injT iecKoro воздействия приводит к измепепию ее -свойств, а следователь- по, и величины наводимой в обмотках 6 ЭДС (фиг.2). Величина этой ЗДС зависит от амплитуды и частоты колебания частид ферромагнитного порошка. Лмнлитуда колебания этих частиц зависит от 7;есткости связи между ними (cTeneini деформации ферроре- знны) и от частоты механического воздействия со стороны электромагнитного поля намагничпвающей обмотки 5, При совпадении частоты внешнего мехсчнического воздействия на ферро- частиг;ы и собственной частоты механического резонанса этих феррочас- тиц наводимая в измерительных обмотках ЭДС будет максимальная (кривая а, фпг.З); частота соответствует частоте механического резонанса 5 Феррорезины.
Частота ff, питания намагничивающей обмотки выбирается близкой к частоте f механического резонанса феррорезины. Кривая б соответствует изменению ЭДС в измерительных обмотках при сжатии феррорезины, а кривая в - при ее растяжении. Благодаря дифференциальной схеме измерения наводимых ЭДС (встречно-последовательному включению измерительных обмоток в каждой паре) при указанном угловом отклонении рукоятки 4 управления на соответствующих выводах пар измерительных обмоток, на0
0
0
5
пример, обмотки 3, пояг1ляе1-ся разность ЭДС ЛК Eg - Eg, величина которой зависит от угля отклонения рукоятки н данной плоскости.
При проитволр)Ном положе ии рукоятки 4 управления нл обеих парах измерительных об тоток появляются выходные сигналы, пропорциональн1:е величине углового отклонения в соответствующей координатной плоскости.
Благодаря испо;7ьяоваиию эффекта колебания поляризованных феррочастии в резине обеспечивается получение более высокой чувствительности и точ ности преобразователя углового положения, так как механические свойства ферророзины существенно изменяются даже при неболы 1их ее деформациях ,
Предлагаемый трансформаторный преобразователь имеет более простхто конструкцию, что повышает техноло- г ичность его изготовления, а также увеличивает срок службы и надежност в эксплутации.
0
5
5
0
Формула изобретения
Трансформаторный преобразователь, содержащий полый корпус и размещенные 3 нем намагничивающую обмотку и лле пары диаметрально противоположно расгголоженных относительно ее пси измерительных обмоток, соединенных в каждой паре последовательно встречно и размещенных внутри намаг- 1П1чивающей обмотки, отличаю- м и и с я тем, что, с целью повышения точности определения углового положения рукоятки управления, корпус выполнен с осевыми отверстиями в его противолежащих стенках, перпендикулярных оси намагничивающей обмотки, предназначенныьо для размещения в них рукоятки управления, и заполнен резиной с наполнителем из ферромагнитного порошка, а измерительные обмотки в каждой паре установлены в плоскости поперечного сечения преобразователя соосно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Клавиатура | 1987 |
|
SU1499478A1 |
| Устройство для измерения магнитострикции | 1986 |
|
SU1374158A1 |
| Проходной преобразователь для неразрушающего контроля физико-механических свойств ферромагнитных изделий | 1986 |
|
SU1396038A1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ФАЗОМОМЕНТНЫХ ХАРАКТЕРИСТИК ВРАЩАЮЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2129709C1 |
| Способ измерения механических напряжений | 1985 |
|
SU1273754A1 |
| СПОСОБ КОНТРОЛЯ ЗАМЫКАНИЯ ЛИСТОВ АКТИВНОЙ СТАЛИ СЕРДЕЧНИКОВ ЭЛЕКТРИЧЕСКИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2082274C1 |
| УСТРОЙСТВО ДЛЯ ЛОКАЛИЗАЦИИ ФЕРРОМАГНИТНОЙ НЕОДНОРОДНОСТИ В НЕМАГНИТНЫХ СРЕДАХ | 2005 |
|
RU2295913C2 |
| Измерительный преобразователь зазоров | 1987 |
|
SU1449839A1 |
| Способ электромагнитного контроля физико-механических параметров движущегося ферромагнитного материала | 1978 |
|
SU974242A1 |
| Датчик углового положения | 1979 |
|
SU887921A1 |
Изобретение относится к измерительной технике ,в частности, к трансформаторным преобразователям. Цель изобретения - повышение точности определения углового положения рукоятки управления в двух координатных плоскостях. Преобразователь содержит заполненный феррорезиной 2 полый корпус 1, в котором размещены намагничивающая обмотка 5 и две пары измерительных обмоток, установленных в каждой паре соосно в плоскости поперечного сечения преобразователя и образующих крестообразную структуру. Рукоятка 4 управления шарнирно закреплена в стенке корпуса и располагается соосно с намагничивающей обмоткой. При угловом отклонении рукоятки 4 в плоскости XX или YY относительно ее нейтрального (вертикального) положения происходят сжатие феррорезины в области одной из измерительных обмоток и растяжение в области другой обмотки той же пары. Это изменяет в противоположных направлениях частоту механического резонанса поляризованных под влиянием магнитного поля переменного тока намагничивающей обмотки 5 феррочастиц, что приводит к появлению разности ЭДС, наводимых в соответствующей паре измерительных обмоток. 3 ил.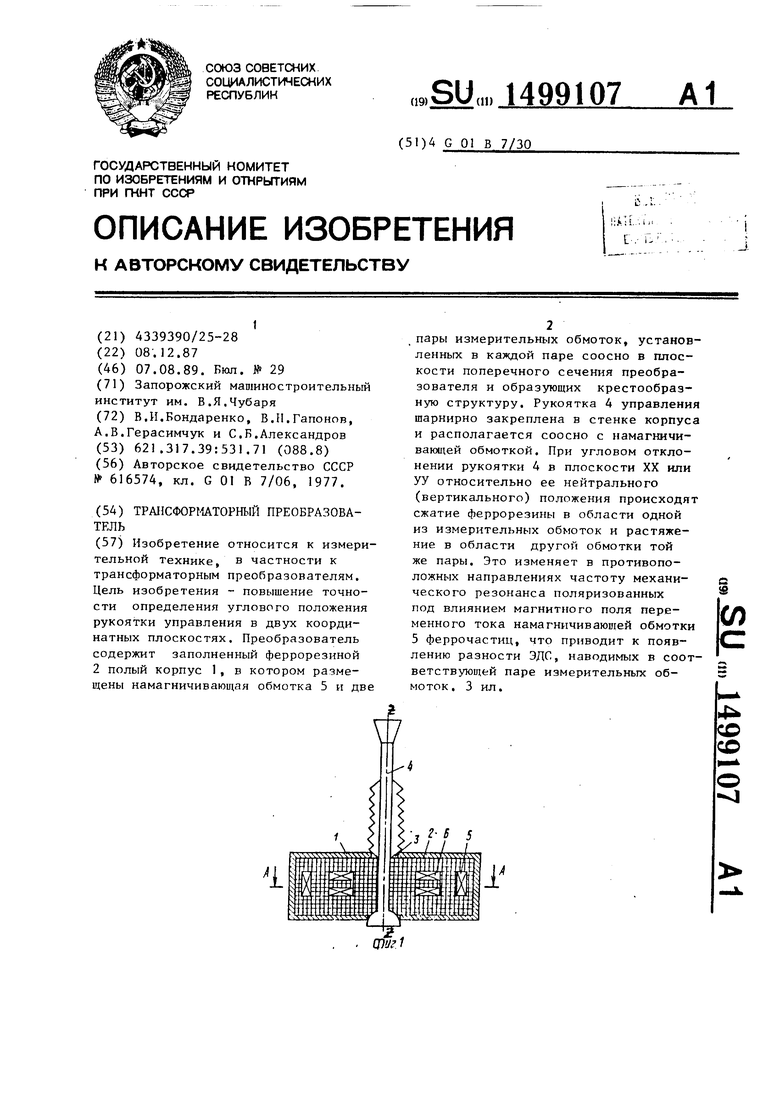
7 ,1 ,2
Фиг.З
| Накладной вихретоковой преобразователь к дефектосткопу | 1977 |
|
SU616574A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
