«и и
со
сх
00
со
Изобретение относится к измерительной технике и может быть использовано для измерения зазоров между вращающимся элементом и охватывающей его поверхностьюi
Цель изобретения - повьшение точности за счет устранения погрешности, обусловленной изменением величины намагничивающей силы и параметров об-- моток в процессе эксплуатации,- и информативности за счет обеспечзния определения угловой координаты минимального зазора.
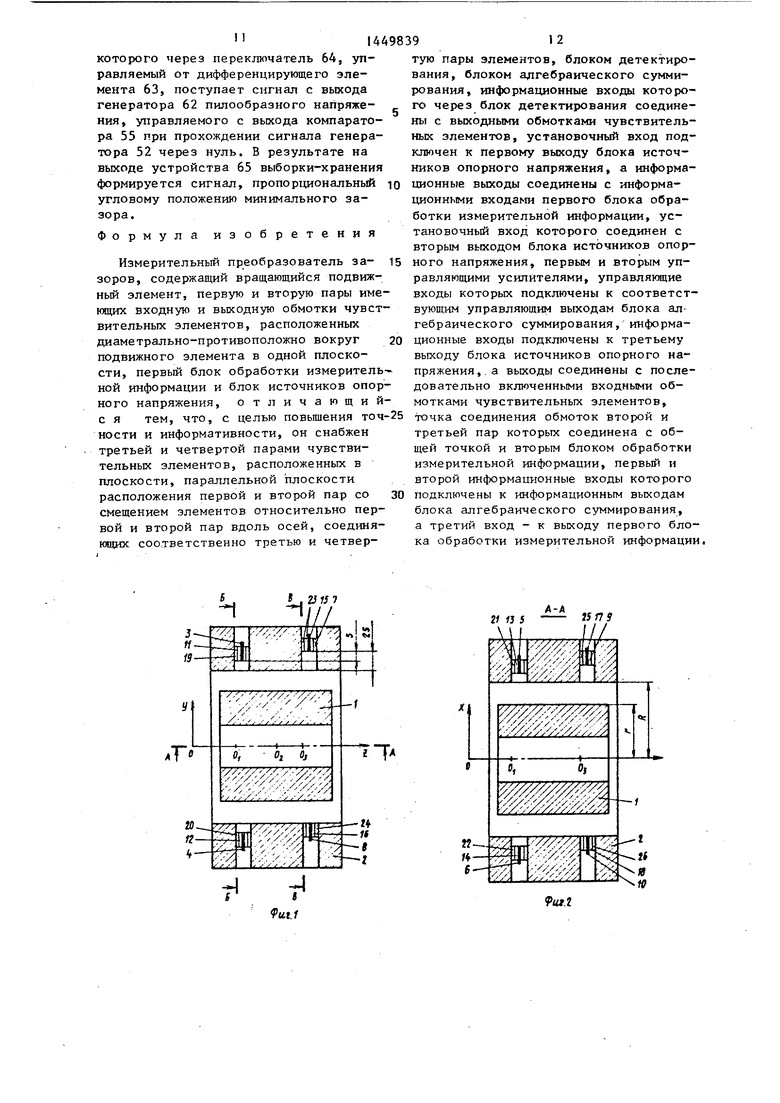
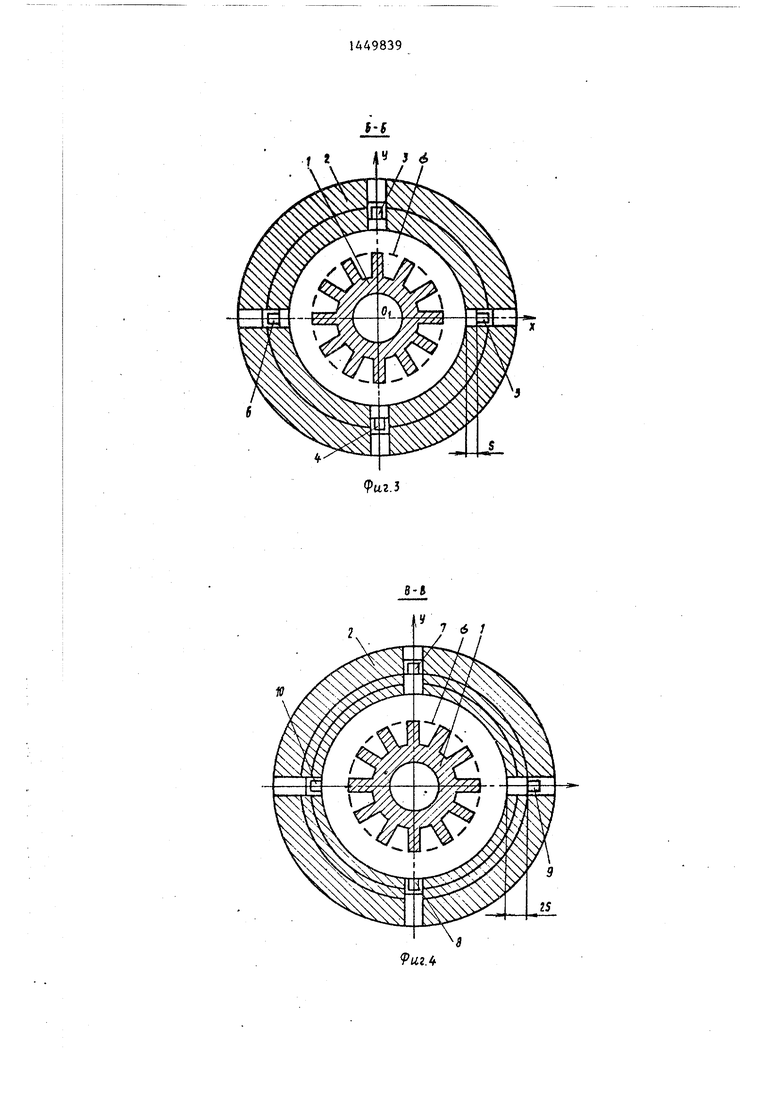
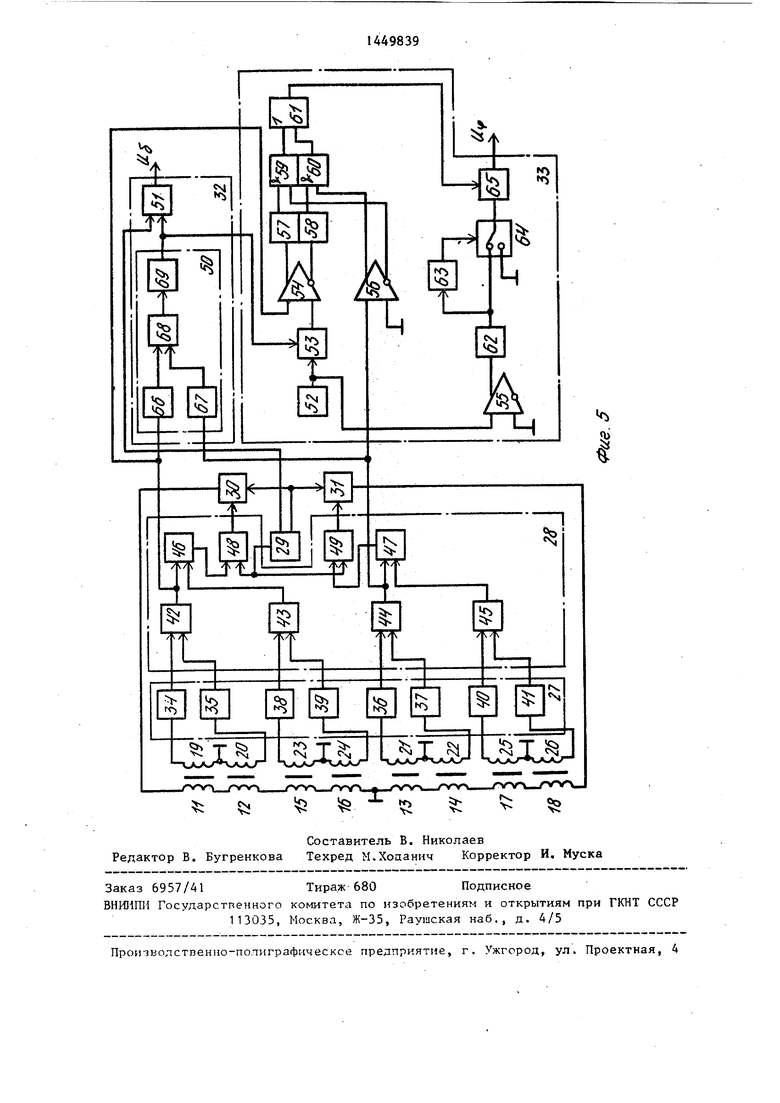
На фиг. 1 приведен корпус измери- тельного преобразователя, сечение; на фиг. 2-4 - сечения А-А; Б-Б; В-В на фиг, 1; на фиг. 5 - блок-схема устройства.
Измерительньй преобразователь за- зоров содержит подвижный элемент 1 с зубчатой поверхностью, корпус 2, в который встроены чувствительные элементы 3 - 10 с входными П - 18 и выходными 19-26 обмотками, при этом элементы 3 и 4 с обмотками П, 19 и 12, 20 образуют первую пару, элементы 5 и 6 с обмотками 15, 23 и 16, 24- вторую, элементы 7 и 8 с обмотками 13 21 и 14, 22 - третью и элементы 9 и 10 с обмотками 17, 25 и 18, 26 - чет- вертую, блок 27 детектирования, блок 28 алгебраического суммирования, ин- . формационные входы которого через блок детектирования связаны с выход- ньми обмотками 19 - 26, блок 29 ис- точников опорного напряжения, первый 30 и второй 31 управляемые усилители, управляющие входы которых подключены к управляющим выходам блока 28 алгеб- раического суммирования, а выходы соединены с последовательно включенными выходными обмотками 19 - 26, первый 32 и второй 33 блоки обработки изме- рительной информации, первый и второй информационные входы которых подключены к информационным выходам блока 28 алгебраического суммирования, третий вход второго блока 33 обработки подключен.к выходу первого блока 32 обработки, а установочные входы блоков 28, 32 и 33 подключены к выходам блока 29 источников опорного напряжения. Блок 27 детектирования содержит детекторы 34-41.
Блок 28 алгебраического суммирования содержит блоки 42 - 49 вычитания Блок 32 обработки .измерительной информации содержит последовательно
соединенные сх%му 50 геометрического суммирования и схему 51 вычитания. Блок 33 обработки измерительной информации содержит задающий генератор 52, аналоговый переключатель 53, перг- вый 54, второй 55 и третий 56 коммутаторы, первый 57 и второй 58 формирователи, элементы И 59 - 60, элемент ИЛИ 61, генератор 62 пилообразного напряжения, дифференцирующий элемент 63, переключатель 64 и устройство 65 выборки-хранения.
Схема 50 геометрического суммирования выполнена в виде блоков 66 и 67 возведения в квадрат, блока 68 сложения и блока 69 извлечения квадратного корня.
Измерительный преобразователь зазоров работает следующим образом.
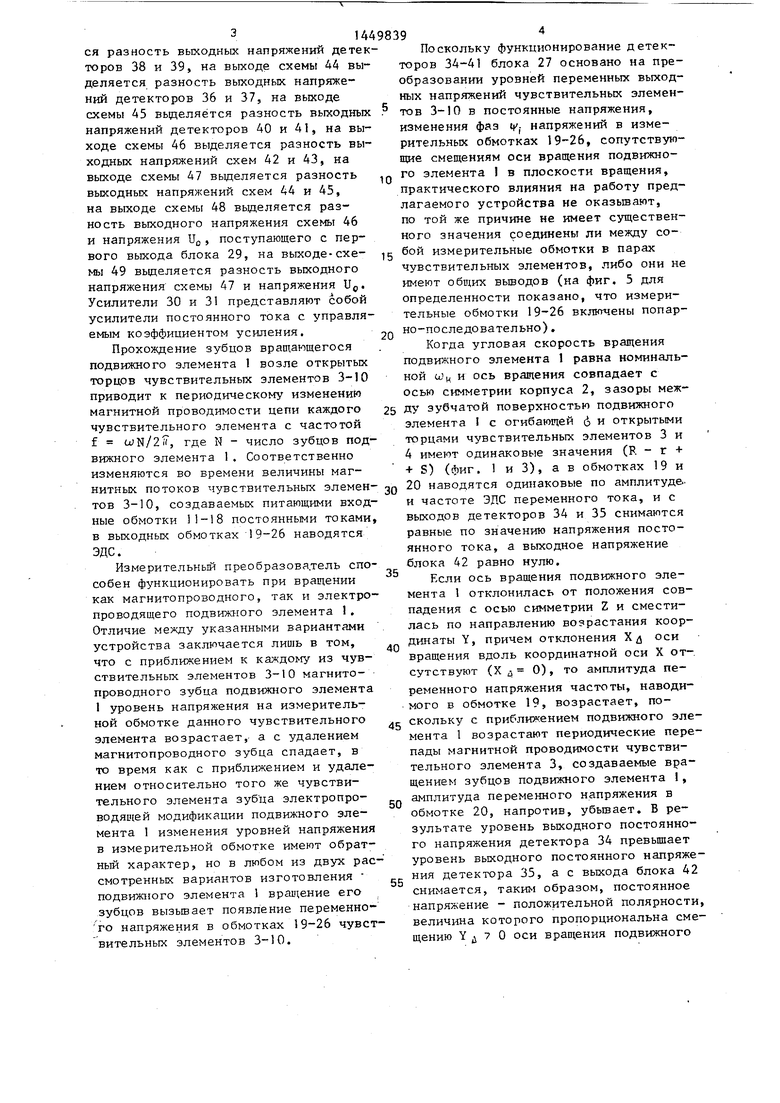
Скорость вращения подвижного элемента 1 в зависимости от режима работы принимает номинальное ш или одно из ряда отклоняющихся от номинального значений. Ось вращения подвижного элемента Г под влиянием возмущающих воздействий смещается в плоскости вращения, задаваемой неподвижными взаимно перпендикулярными координатными осями X и Y. При совпадении оси вращения подвижного элемента 1 с неподвижной осью симметрии Z корпуса 2 зазор с, образуемьй выступами-зубцами профилированного подвижного элемента 1 и охватывающей его цилиндрической поверхностью отверстия корпуса 2 радиуса Р, в котором размещен подвижиьй элемент 1, постоянен вдоль всей упомянутой охватывающей поверхности. Открытые торцы чувствительных элементов 3-6 первой и второй пар отстоят от оси Z на расстояние (R + + S), чувствительные элементы 7 и 9 отстоят от оси Z на расстояние (R + + 2 S), а чувствительные элементы 8 и 10 - на расстояние R, т.е. первая и вторая пары чувствительных элемен- тов размещены симметрично относительно оси Z, а третья и четвертая пары, имея равные с первой и второй парой расстояния 2(R + S) между противолежащими открытыми торцами чувствительных элементов в каждой паре, смещены по отнощению соответственно к первой и второй парам на расстояние S (фиг. 1-4).
На выходе блока 42 вьделяется разность выходных напряжений детекторов 34 и 35, на выходе схемы 43 вьщеляет31449839
ся разность выходных напряжений детек-Поскольку функционирование детекторов 38 и 39, на выходе схемы 44 вы- торов 34-41 блока 27 основано на пре- деляется разность выходных напряже-образовании уровней переменных выходний детекторов 36 и 37, на выходеных напряжений чувствительных элеменсхемы 45 вьщеляётся разность выходных . тов 3-10 в постоянные напряжения, напряжений детекторов 40 и 41, на выходе схемы 46 выделяется разность выходных напряжений схем 42 и 43, на выходе схемы 47 вьщеляется разность
выходных напрял ений схем 44 и 45, на выходе схемы 48 выделяется разность выходного напряжения схемы 46 и напряжения U, поступающего с пер10
изменения фаз tfj напряжений в измерительных обмотках 19-26, сопутствующие смещениям оси вращения подвижного элемента I в плоскости вращения, практического влияния на работу предлагаемого устройства не оказьшают, по той же причине не имеет существенного значения соединены ли между соУ1 П 1 jL/ i/Ixti л rJ/I -JO У Д1. 4. jf i u-s - - -- -jвого выхода блока 29, на выходе-схе- ig ° измерительные обмотки в парах
чувствительных элементов, либо они не имеют общих вьшодов (на фиг, 5 для определенности показано, что измерительные обмотки 19-26 вклктчены попар2„ но-последовательно).
Когда угловая скорость вращения подвижного элемента 1 равна номинальной о; ц и ось вращения совпадает с осью симметрии корпуса 2, зазоры меж25 ДУ зубчатой поверхностью подвижного элемента I с огибающей 6 и открытыми торцами чувствительных элементов 3 и 4 имеют одинаковые значения (R - г + + S) (Лиг. 1 и 3), а в обмотках 19 и
41Д fj ilTinJl ri JD - ju jt-i i -iiri A o ji-Ji - - .. V
нитных потоков чувствительных элемен- до20 наводятся одинаковые по амплитуде,
тов 3-10, создаваемых питающими вход-и частоте ЭДС переменного тока, и с ные обмотки П-18 постоянными токами, выходных обмотках 19-26 наводятся
мы 49 выделяется разность выходного напряжения схемы 47 и напряжения U. Усилители 30 и 31 представляют собой усилители постоянного тока с управляемым коэффициентом усиления.
Прохождение зубцов вращающегося подвижного элемента 1 возле открытых торцов чувствительных элементов 3-10 приводит к периодическому изменению магнитной проводимости цепи каждого чувствительного элемента с частотой f u}f /2 ti, где N - число зубцов подвижного элемента 1. Соответственно изменяются во времени величины маг35
40
в
ЭДС.
Измерительный преобразова.тель способен функционировать при вращении как магнитопроводного, так и электропроводящего подвижного элемента 1, Отличие между указанными вариантами устройства заключается лишь в том, что с приближением к каждо гу из чувствительных элементов 3-10 магнитопроводного зубца подвижного элемента 1 уровень напряжения на измерительной обмотке данного чувствительного элемента возрастает, а с удалением магнитопроводного зубца спадает, в то время как с приближением и удалением относительно того же чувствительного элемента зубца электропроводящей модификации подвижного элемента 1 изменения уровней напряжения в измерительной обмотке имеют обратный характер, но в любом из двух рассмотренных вариантов изготовления gg подвижного элемента 1 вращение его зубцов вызьшает появление переменно- го напряжения в обмотках 19-26 чувствительных элементов 3-10.
выходов детекторов 34 и 35 снимаются равные по значению напряжения постоянного тока, а выходное напряжение блока 42 равно нулю.
Если ось вращения подвижного элемента 1 отклонилась от положения совпадения с осью симметрии Z и сместилась по направлению возрастания координаты Y, причем отклонения оси вращения вдоль координатной оси X отсутствуют (X д 0), то амплитуда переменного напряжения частоты, наводи- - мого в обмотке 19, возрастает, поскольку с приближением подвижного эле мента 1 возрастают периодические пере пады магнитной проводимости чувствительного элемента 3, создаваемые вращением зубцов подвижного элемента I, амплитуда переменного напряжения в обмотке 20, напротив, убьшает. В результате уровень выходного постоянного напряжения детектора 34 превьшает уровень выходного постоянного напряже ния детектора 35, а с выхода блока 4 снимается, таким образом, постоянное напряжение - положительной полярност величина которого пропорциональна см щению Y д 7 О оси вращения подвижного
50
тов 3-10 в постоянные напряжения,
изменения фаз tfj напряжений в измерительных обмотках 19-26, сопутствующие смещениям оси вращения подвижного элемента I в плоскости вращения, практического влияния на работу предлагаемого устройства не оказьшают, по той же причине не имеет существенного значения соединены ли между сои частоте ЭДС переменного тока, и с
5
0
gg
выходов детекторов 34 и 35 снимаются равные по значению напряжения постоянного тока, а выходное напряжение блока 42 равно нулю.
Если ось вращения подвижного элемента 1 отклонилась от положения совпадения с осью симметрии Z и сместилась по направлению возрастания координаты Y, причем отклонения оси вращения вдоль координатной оси X отсутствуют (X д 0), то амплитуда переменного напряжения частоты, наводи- - мого в обмотке 19, возрастает, поскольку с приближением подвижного элемента 1 возрастают периодические перепады магнитной проводимости чувствительного элемента 3, создаваемые вращением зубцов подвижного элемента I, амплитуда переменного напряжения в обмотке 20, напротив, убьшает. В результате уровень выходного постоянного напряжения детектора 34 превьшает уровень выходного постоянного напряжения детектора 35, а с выхода блока 42 снимается, таким образом, постоянное напряжение - положительной полярности, величина которого пропорциональна смещению Y д 7 О оси вращения подвижного
50
элемента 1 вдоль координатной оси Y при Х 0.
Если ось вращения подвижного элемента 1 сместится из своего симметрич- положение, совпадающее него положения, совпадающего с непод- v . п Y . важной осью симметрии Z, в направлении возрастания отрицательных значений координаты Y, причем отклонения оси вращения вдоль второй координат- ю ной оси X отсутствуют (Х) 0), то амплитуда переменного напряжения в обмотке 20 превьппает амплитуду переменного напряжения в обмотке 19, поскольку теперь зубцы подвижного элемента 15 1 вращаются ближе к чувствительному элементу 4 уровни постоянного напряжения на выходе детектора 34 оказьша- ется в этом случае сниженными сравнительно с уровнем напряжения на выхо-20 вижного элемента 1 вдоль координатной де детектора 35. На выходе блока 42 оси X в положительном направлении выделяется постоянное напряжение уже (вверх по фиг. 2, вправо по фиг. Зи4),
причем отклонения оси вращения вдоль координатной оси Y отсутствуют (Y 25 0), ведет к увеличению амплитуды переменного напряжения в обмотке 21 и снижению амплитуды переменного напряжения в обмотке 22, в результате / чего уровень напряжения на выходе 30
Когда ось вращения подвижного элемента 1 занимает в отверстии корпуса 2, где размещен подвижный элемент 1,
с осью симметрии (Yd О, Х4 0) зубчатая поверхность подвижного элемента 1 с огибающей оказьшается равноудаленной также от открытых торцов чувствительных элементов 5 и 6 второй пары. Поэтому ЭДС, наводимые при вращении под- рижного элемента 1 в обмотках 21 и 22, равны между собой по амплитуде и частоте, и на выходах детекторов 36 и 37 выделяются равные по значению постоянные напряжения, разность которых - вьгходное напряжение блока 44 - равна нулю.
Смеп;ение Х 7 О оси вращения подотрицательной полярности, уровень которого пропорционален смещению (Y) оси вращения подвижного элемента 1 вдоль координатной оси Y в отрицательном направлении при Х 0.
Из-за установочного сдвига чувствительных элементов 7 и 8 третьей пары по координатной оси Y на расстояние S разность амплитуд переменных напряжений в обмотках 23 и 24, а также разность уровней постоянных напряжений- на выходах детекторов 38 и 39, вьще- ляемая на вькоде блока 43, равна нулю, когда сдвиг оси вращения подвижного элемента 1 вдоль координатной оси Y составляет Y S, поскольку
35
детектора 36 оказьшается увеличенным по сравнению с уровнем напряжения на выходе детектора 37, и с выхода блока 44 снимается постоянное напряжение положительной полярности, пропорциональное величине смещения .
Смещение X 5- О оси вращения подг.... вижного элемента 1 в отрицательном направлении координатной оси X, причем отклонения оси вращения вдоль
именно такое смещение подвижного эле- о координатной оси Y отсутствуют, Y мента 1 приводит ось вращения в положение, симметричное относительно
чувствительных элементов 7 и 8 третьей пары. При отклонениях оси вра- щения подвижного элемента 1 от положения Y S вдоль координатной оси Y, когда отсутствуют отклонения упомянутой оси вдоль координатной оси X (X ), амплитуды переменного напряжения в обмотках 23 и 24, а также уровни постоянных напряжений на выходах детекторов 38 и 39 и блока 43 изменяются так же, как соответствующие им уровни выходных напряжений обмоток 19 и 20 детекторов 34 и 35 и блока 42 при отклонениях оси вращения подвижного элемента 1 от положения, совпадающего с осью симметрии 7. для X U 0.
О (т.е. вниз по фиг. 2, влево по фиг. 3 и 4), ведет к снижению уровней сигналов в обмотке 21, а также на выходе схемы 36 и к увеличению
45 уровней сигналов в измерительной обмотке 22, на выходе детектора 37, и на выходе блока 44 выделяется постоянное напряжение отрицательной полярности, уровень которо50 го пропорционален величине смещения ХлОси вращения подвижного элемента 1 в направлении возрастания отрица-: тельных значений координаты X.
Открытые торцы чувствительных эле- ментов 9 и.10 четвертой пары, сдвинутых на расстояние S вдоль координатной оси X относительно чувствительных элементов 5 и 6 второй пары, удалены
положение, совпадающее v . п Y . вижного элемента 1 вдоль координатной оси X в положительном направлении (вверх по фиг. 2, вправо по фиг. Зи4),
Когда ось вращения подвижного элеента 1 занимает в отверстии корпуса 2, где размещен подвижный элемент 1,
с осью симметрии (Yd О, Х4 0) зубчатая поверхность подвижного элемента 1 с огибающей оказьшается равноудаленной также от открытых торцов чувствительных элементов 5 и 6 второй пары. Поэтому ЭДС, наводимые при вращении под- рижного элемента 1 в обмотках 21 и 22, равны между собой по амплитуде и частоте, и на выходах детекторов 36 и 37 выделяются равные по значению постоянные напряжения, разность которых - вьгходное напряжение блока 44 - равна нулю.
Смеп;ение Х 7 О оси вращения подпричем отклонения оси вращения вдоль координатной оси Y отсутствуют (Y 25 0), ведет к увеличению амплитуды переменного напряжения в обмотке 21 и снижению амплитуды переменного напряжения в обмотке 22, в результате чего уровень напряжения на выходе 30
35
детектора 36 оказьшается увеличенным по сравнению с уровнем напряжения на выходе детектора 37, и с выхода блока 44 снимается постоянное напряжени положительной полярности, пропорциональное величине смещения .
Смещение X 5- О оси вращения подг.. вижного элемента 1 в отрицательном направлении координатной оси X, причем отклонения оси вращения вдоль
о координатной оси Y отсутствуют, Y
О (т.е. вниз по фиг. 2, влево по фиг. 3 и 4), ведет к снижению уровней сигналов в обмотке 21, а также на выходе схемы 36 и к увеличению
45 уровней сигналов в измерительной обмотке 22, на выходе детектора 37, и на выходе блока 44 выделяется постоянное напряжение отрицательной полярности, уровень которо50 го пропорционален величине смещения ХлОси вращения подвижного элемента 1 в направлении возрастания отрица-: тельных значений координаты X.
Открытые торцы чувствительных эле- ментов 9 и.10 четвертой пары, сдвинутых на расстояние S вдоль координатной оси X относительно чувствительных элементов 5 и 6 второй пары, удалены
ения выходным напряжением блока А8 нулевого уровня (с точностью до ста тической ошибки описанной цепи коррекции значений токов, питающих входные обмотки 11, 12, 15 и 16).
Аналогично вышеизложенному корректируется системой сигналов блоков 44 и 45 от смещений оси вращения подвижного элемента 1 вдоль координатной оси X, когда составляющая данного смещения вдоль координатной оси Y не равна нулю. Разность выходных напряжений блоков 44 и 45 вычитания, вьделенная на выходе блока 47, сравнивается в блоке 49 с опорным напря- жением, а напряжение с выхода блока 49 корректирует коэффициент усиления второго усилителя 31, повьпиающего величину тока питания входных обмоток 13, 14, 17 и 18 второй и четвертой пар чувствительных элементов до значений, обеспечивающих соответствие уровней сигналов в выходных обмотках 21, 22, 25 и 26, а также на выходах детекторов 36, 37, 40 и 41 блока 27 тем уровням, которые необходимы
Таким образом, обеспечивается неоднозначность соответствия значений выходных напряжений блоков 42 и 43 со- ставляющей смещения Y оси вращения подвижного элемента 1 вдоль коорди- н атной оси Y независимо от положения, занимаемого указанной осью вращения вдоль координа шой оси X (в пределах отверстия в корпусе 2, где размещен подвижньй элемент 1), а также однозначность соответствия значений выходных напряжений блоков 44 и 45 составляющей X д смещения оси вращения подвижного элемента 1 вдоль координатной оси X независимо от положения, занимаемого осью вращения вдоль координатной оси X (в пределах отверстия в корпусе 2, где размещен подвижный элемент I), а также однозначность соответствия значений вьгходньк напряжений блоков 44 и 45 составляющей X смещения оси вращения подвижного элемента 1 вдоль координатной оси X независимо от положения, занимаемого осью вращения вдоль координатной оси Y в пределах отверстия корпуса 2.
При отклонении скорости вращения подвижного элемента 1 от номинальной уровни сигналов переменного напряже- , кия в обмотках 19-26 также не остаются постоянными: при возрастании уг- левой скорости ы Шц они увеличивают
0
5
0
.ся, а при ее снижении w и; - умен шаются. Следовательно, изменяется крутизна зависимостей выходных на. пряжений: блоков 42 и 43 - от смещений Y, а блоков 44 и 45 - от смещений X. Выходные сигналы блоков 48 и 49, воздействуя на управляющие входы первого 30 и второго 3 усилителей, 0 корректируют значения их коэффициента усиления (эти значения уменьшаются при cJ-jcUj, и увеличиваются при Wio.), что приводит к соответствующему изменению величины постоянных
5 токов, питающих обмотки 11-18 и возвращению крутизны зависимостей вькод- ных сигналов блоков 42 - 45 от смещения и номинальному значению U, /S .
Сигналы с выходов блоков 42 и 44 поступают на входы блоков 32 и 33. В блоке 32 производится суммирование квадратов смещений Х и Y с последующим вычислением квадратного корня этой суммы при помощи блока 69, выходной сигнал которого вычитается из опорного напряжения, пропорционального разности R - г, в результате чего на выходе схемы 51 вьгаитания вьщеляет- ся сигнал, пропорциональный величине минимального зазора. В блоке 33 производится формирование напряжения, пропорционального угловой координа.те (f положения минимального зазора. Это происходит следующим образом Генера5 тор 52 генерирует гармонический сигнал, который поступает на вход аналогового переключателя 53 и вход комму- , татора 55. На второй вход блока 53 поступает сигнал с выхода схемы 50 геометрического суммирования блока 32, пропорциональный корню квадратному из суммы квадратов смещений по осям X и Y. Напряжение с выхода блока 53 поступает на один вход коммутатора
5 54, на другой вход которого поступает
. сигнал с выхода блока 42, формирующий разностный сигнал первой пары чувствительных элементов 3 и 4. На вход компаратора 56 поступает сигнал с выхода блока 44, формирующий разностный сигнал третьей пары элементов 7 и 8. С выходов компаратора 54 сигналы через формирователи 57 и 58 поступают на первые входы элементов И 59 и 60,
55 на вторые входы которых поступают сигналы с выходов компаратора 56. Сигналом с выходов элементов И 59 и 60 через элемент ИЛИ 61 управляется устройство 65 выборки-хранения, на вход
0
0
на равные расстояния (R - г -i- S) относительно виепшей зубчатой поверхности подвижного элемента 1 с огибающей 6, когда смещение оси вращения подвижного элемента 1 имеет составляющие у о, Х S, тогда амплитуды ЭДС,
наводимых при вращении подвижного элемента I в обмотках 25 и 26, равны между собой. Поскольку в этом случае ю одинаковыми являются также и уровни выходных напряжений детекторов 40 и 41, то на выходе блока 45 напряжение равно нулю.
приближения подвижного элемента I, либо отрицательные в случае его удаления относительно любого из указанных чувствительных элементов) напряжения в обмотках 19, 20, 23 и 24 снижаются сравнительно с прирапениями амплитуд напряжений в них, имеющими место при смещениях оси вращения подвижного элемента вдоль оси Y, когда отсутствуют отклонения вдоль координатной оси X (т.е. сравнительно с рассмотренными вьипе случаями). В самом деле, при люб ом положении Yj оси вращения
При отклонении оси вращения подвиж-15 подвижного элемента 1 на первой коор- ного элемента 1 от положения (Ул 0. динатной оси Y зазор между внешней
X л S) в сторону возрастания положительных значений координаты X (вверх по фиг. 2, вправо по фиг. 3 и 4) зубцы подвижного элемента 1 приближаются к 20 чувствительному элементу 9 и удаляются от чувствительного элемента 10, что ведет к возрастанию уровней напряжений в обмотке 25 и иа выходе детекзубчатой поверхностью подвижного элемента I и открытым торцом противолежащего ей чувствительного элемента меньше, чем зазор между тем же участком той же зубчатой поверхности и тем же торцом чувствительного элемента для того же значения Y, но при появлении отклонения оси вращения
ЖеНИИ в UUMU lUf. JL.J и па , i iw vгтора 40, и к снижению уровней напря- 25, подвижного элемента 1 от того ее положения, которое совпадает с самой осью Y и для которого X д о. Соответственно снижаются приращения уровней выходных сигналов на выходах дежения в измерительной обмотке 26, а также на выходе детектора 41. В результате, этого на выходе блока 45 выделяется сигнал постоянного напряже- -- ,, -чя « IQ йпокя 27 НИН положительной полярности, уровень 30 текторов 34, 35, 38 и 39 блока il. которого пропорционален величине сне- Следовательно, при отклонениях
X д 5 О ОСИ вращения подвижного элемента 1 вдоль координатной оси X крутизна зависимостей выходных напряже- .
щения (Xj --S) -- О оси вращения вдоль координатной оси X.
При смещении оси вращения подвижного элемента 1 из положания (Y 0, Xд S) в сторону возрастания отрицательных значений координаты X, т.е. вниз по фиг. 2, влево по фиг. 3 и 4, уровни напряжений в обмотке 25,
35
НИИ схем 42 и 43 от смещений оси
вращения подвижного элемента 1 вдоль координатной оси Y уменьшается, что вызывает уменьшение амплитуды выходного сигнала блока 46, подаваемого
а такж; на вькоде детектора 40 снижа- 40 на один из входов блока 48, на второй ются сравнительно с уровнями напряже- вход которого поступает опорное на- ний соответственно в измерительной пряжение из блока 29.
Напряжение UQ, воздействующее на второй вход блока 48, от смещений оси 45 вращения подвиж.ного элемента не завиобмотке 26 и на выходе детектора 4i. При этом на выходе блока 45 выделяется постоянное напряжение отрицательной полярности, по уровню пропорциональное величине смещения (X - S) .
Если ось вращения подвижного элемента 1 смещается вдоль первой коорсит, поэтому разностное напряжение, вьщеляемое на выходе блока 48, становится отличным от нуля, его поступление иа управляющий вход первого усимента I смещается вдидс ucijoun . - „„„а™о. ос„ Y „, произвольного поло- во ™-ля О Увел„-,„вае. -эФФиииен. ,
жения X д О на оси X, то, ввиду отклонения зубчатой поверхности с огибающей d ПОДВИЖНОГО элемента 1 от положений противостояния торцам чувствительных элементов 3, 4, 7 и 8, реализуемых только при совпадении оси вращения подвижного элемента 1 с осью Y, т.е. при Хд О, приращения амплитуд (положительные в случае
усиления, что ведет к повьштешпо значения тока, питающего входные обмотки 11, 12, 15 и 16 чувствительных элементов 3, А, 7 и 8 и соответственно 55 к повьпнению величины намагничивающей силы, действ тощей в данных чувствительных элементах. В результате уровни напряжений в вькодных обмотках 19, 20, 23 и 24 возрастают до дости
8
ю
приближения подвижного элемента I, либо отрицательные в случае его удаления относительно любого из указанных чувствительных элементов) напряжения в обмотках 19, 20, 23 и 24 снижаются сравнительно с прирапениями амплитуд напряжений в них, имеющими место при смещениях оси вращения подвижного элемента вдоль оси Y, когда отсутствуют отклонения вдоль координатной оси X (т.е. сравнительно с рассмотренными вьипе случаями). В самом деле, при люб ом положении Yj оси вращения
15 подвижного элемента 1 на первой коор- динатной оси Y зазор между внешней
подвижного элемента 1 на первой коор- динатной оси Y зазор между внешней
зубчатой поверхностью подвижного элемента I и открытым торцом противолежащего ей чувствительного элемента меньше, чем зазор между тем же участком той же зубчатой поверхности и тем же торцом чувствительного элемента для того же значения Y, но при появлении отклонения оси вращения
гподвижного элемента 1 от того ее поподвижного элемента 1 от того ее положения, которое совпадает с самой осью Y и для которого X д о. Соответственно снижаются приращения уровней выходных сигналов на выходах де-- ,, -чя « IQ йпокя 27 текторов 34, 35, 38 и 39 блока il. Следовательно, при отклонениях
X д 5 О ОСИ вращения подвижного эл мента 1 вдоль координатной оси X тизна зависимостей выходных напря
35
НИИ схем 42 и 43 от смещений оси
вращения подвижного элемента 1 вд координатной оси Y уменьшается, ч вызывает уменьшение амплитуды вых ного сигнала блока 46, подаваемог
Напряжение UQ, воздействующее на второй вход блока 48, от смещений оси вращения подвиж.ного элемента не зависит, поэтому разностное напряжение, вьщеляемое на выходе блока 48, становится отличным от нуля, его поступление иа управляющий вход первого уси - ™-ля О Увел„-,„вае. -эФФиииен. ,
™-ля О Увел„-,„вае. -эФФиииен. ,
усиления, что ведет к повьштешпо значения тока, питающего входные обмотки 11, 12, 15 и 16 чувствительных элементов 3, А, 7 и 8 и соответственно к повьпнению величины намагничивающей силы, действ тощей в данных чувствительных элементах. В результате уровни напряжений в вькодных обмотках 19, 20, 23 и 24 возрастают до достикоторого через переключатель 64, управляемый от дифференцирующего элемента 63, поступает сигнал с выхода генератора 62 пилообразного напряжения, управляемого с выхода компаратора 55 при прохождении сигнала генератора 52 через нуль. В результате на выходе устройства 65 выборки-хранения формируется сигнал, пропорциональный угловому положению минимального зазора. Формула изобретения
Измерительный преобразователь за- зоров, содержащий вращающийся подвижный элемент, первую и вторую пары имеющих входную и выходную обмотки чувствительных элементов, расположенньк диаметрально-противоположно вокруг подвижного элемента в одной плоскости, первый блок обработки измерительной информации и блок источников опорного напряжения, отличающий- с я тем, что, с целью повышения точности и информативности, он снабжен третьей и четвертой парами чувствительных элементов, расположенных в плоскости, параллельной плоскости расположения первой и второй пар со смещением элементов относительно первой и второй пар вдоль осей, соединяющих соответственно третью и четвертую пары элементов, блоком детектирования, блоком алгебраического суммирования, информавдюнные входы которого через блок детектирования соединены с выходными обмотками чувствительных элементов, установочный вход подключен к первому выходу блока источников опорного напряжения, а информационные выходы соединены с информационными входами первого блока обработки измерительной информации, установочный вход которого соединен с вторым выходом блока источников опорного напряжения, первым и вторым управляющими усилителями, управляющие входы которых подключены к соответствующим управляющим выходам блока алгебраического суммирования, информационные входы подключены к третьему выходу блока источников опорного напряжения,, а выходы соединены с последовательно включенными входными обмотками чувствительных элементов, точка соединения обмоток второй и третьей пар которых соединена с общей точкой и вторым блоком обработки измерительной информации, первый и второй информационные входы которого подключены к информационным выходам блока алгебраического суммирования, а третий вход - к выходу первого блока обработки измерительной информаци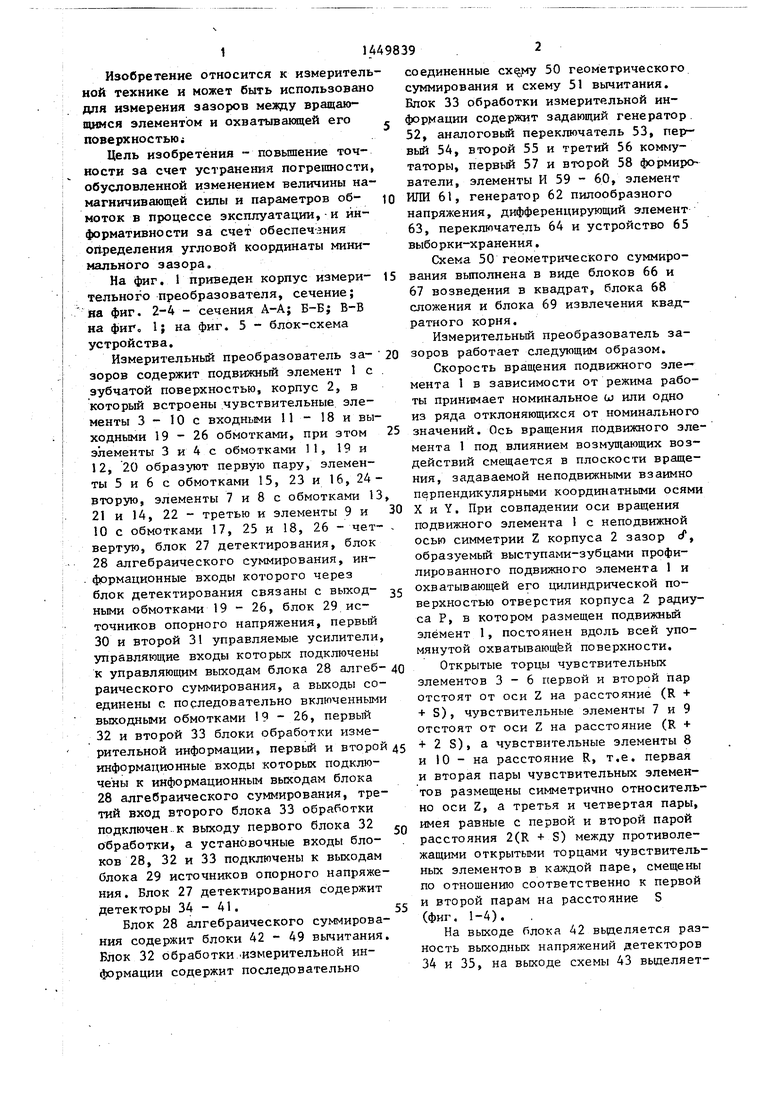

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированное устройство измерения магнитных характеристик ферромагнитных пленок | 2021 |
|
RU2774859C1 |
| Преобразователь перемещений в код | 1988 |
|
SU1559406A1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| Измерительная головка | 1986 |
|
SU1409866A1 |
| Электромагнитный преобразователь перемещения в код | 1987 |
|
SU1439736A1 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП | 1995 |
|
RU2085932C1 |
| Устройство для считывания графической информации | 1983 |
|
SU1161972A2 |
| Трансформаторный преобразователь перемещений | 1985 |
|
SU1357693A1 |
| Микромеханический гироскоп | 2019 |
|
RU2714870C1 |
| Автоколлиматор | 1976 |
|
SU670804A2 |
Изобретение относится к измерительной технике и может быть использовано для измерения зазоров между вращакяцимся элементом и охватьшающей его поверхностью. Цель изобретения повьопение точности и информ ативности. Поставпенная цель достигается тем, что преобразователь снабжен в дополнение к первой и второй, третьей и четвертой парами чувствительных элементов, расположенных со смещением относительно элементов первой и второй пар, блоком алгебраического суммирования, двумя управляющими усилителями и вторым блоком обработки измерительной информации. При помощи управляющих усилителей обеспечивается постоянство крутизны характеристики тракта передачи измерительного сигнала, что позволяет устранить погрешность, вызываемую применением параметров элементов в процессе эксплуатации. За счет обеспечения определения углового положения минимального зазора по - вьшается информативность преобразователя . 5 ил. (Л
.Г
Oj
9ut.f
21 Ш - «р9 11/
ТТА
0}
,1 tt
9ia.Z
| Устройство для измерения перемещений вращающегося вала | 1974 |
|
SU589541A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Датчик для измерения смещений оси вала | 1980 |
|
SU1023194A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения воздуш-НОгО зАзОРА | 1979 |
|
SU800616A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
