(Л
3149
Изобретение относится к устройствам контроля и управления ходом производственного процесса и может быть использовано в автоматизирован- ных системах контроля и управления различными технологическими процессами, а также в научных исследованиях и технике, где трубуется нахождение оптимального значения длитель- ности (оперативности) цикла управления о
Цель изобретения - повышение точности определения длительности цикла управления системой, процесс функцио нирования которой происходит в условиях возмущающих воздействий, на нейтрализацию которых тратится определенная часть ограниченных ресурсов системы,
При обеспечении условия устойчивости процесса функционирования автоматизированных систем управления, Тоео устойчивости автоматизированного управления, возникает задача существенного сокращения времени поиска оптимального решения задач управления Особое значение этот вопрос приобретает в экстремальных условиях функционирования АСУ. При это сокращение времени на процесс выбора оптимального решения жизненно необходимо, так как задержка с решением может привести к потере смысла вы-- полнять целевые задачи Такое сокра- щение времени приводит к увеличению вероятности того, что система управления успеет вьщать зшравляющее воздействие до того, как нарушится условие устойчивости процесса ее фун- кционирования.
Таким образом, возникает необходимость обоснования длительности решения задач управления (оперативности) 5 при котором получается наиболее оперативное и рациональное решение задачи з равления
Существо задачи заключается в выборе такого времени (.tp, t) цикла управления, при котором будет достигать максимума вероятность Р( выполнения целевой задачи, т,е,
arg max СсГ ).
leG
Пусть вероятность получения точ-. ного рещения описьюается зависимостью Р 1 - , где 9 - среднее время решения. Полагаем, что целевые задачи будут выполнены при соблюдении о , т,е, задача управления должна быть решена не позднее „ Учитывая случайный характер среды, последнее условие является вероятностным и имеет вид Р - Р ( t.)
е. , где 1 средний момент времени, к которому должна быть выполнена целевая задача, В силу указанного вероятность РС ) выполнения целевой задачи имеет вид
-t 1 РСо ) (1 - е .
Предлагаемое устройство определяет оптимальное значение длительности цикла управления системой, процесс функционирования которой происходит в условиях возмущающих воздействий. При этом используется критерий макси мума вероятности устойчивого управления системой, т,е,
arg max Р( t: ),
ге
Аналитическое выражение для вероятности Р() можно представить различным образом, т,е.
(t-e- .
л, д, QiU
е - - ,
(1) (2)
(3)
Устройство осуществляет поиск оп- тн- ального значения времени длительности цикла управления непосредственно из модели (3), так как на практике часто требуется, чтобы вероятность устойчГивого зшравления была максимальной с учетом как.качества управляющих воздействий, так и состояния згаравляемого объекта в течение определенного времени. Эта идея реализуется в устройстве
На чертеже приведена функциональ™ ная схема устройства.
Устройство содержит датчик 1 времени, инвертор 2, ключ 3, элемент 4 задержки, блоки 5 и 6 умножения, . блоки 7 и 8 деления, блоки 9 и 10 нелинейности, сумматоры 11 и 12, элемент 13 сравнения.
Устройство работает следующим образом.
Датчик 1 времени с шагом bt задает в порядке нарастания последовательность возможных значений времени длительности цикла управления.
С;
чения
2-;.,+4 , где i 1, 2,
. . Знаподаются на вход инвертора 2 и на информационный вход ключа 3. С выхода инвертора 2 значение величины с, поступает на второй вход блока 7 деления и на второй вход блока 5 умножения. На первый вход блока 7 деления поступает значение константы i , которое также подается на первый вход второго блока 6 умножения и на первый вход второго сумматора 12 о На вторые входы блока 6 умножения и сумматора 12 подается значение константы б. Полученное на выходе сумматора 12 значение величины ( + Q делится во втором блоке 8 деления на величину (, Q , поступающую с выхода блока 6 умножения. С выхода блока 8 деления значение величины
С(КО (.д
г- поступает на первый вход
блока 5 умножения, где оно умножается на величину , поступающую с выхода инвертора 2,
В блоке 7 деления вычисляется
величина /Vt
Oi
которая поступает на
вход первого нелинейного преобразователя 9, в котором вычисляется дпя каждого очередного значения функционал
чина
- ./V С выхода блока 5
( + а
умножения велиу. 6
поступает на вход
второго нелинейного преобразовате- jia 10, в котором для каждого очередного значения вычисляется функция
- lli .
е V S . Полученные величины с выходов первого 9 и второго 10 нелинейных преобразователей подаются соот- ветственно на второй и четвертый входы первого сумматора 11, в котором вычисляется искомое значение вероятности ( &;) успешного вьтолнения целевой задачи за время (9 ,;)« Полученная величина вероятности РСо) поступает через элемент 4 задержки на первый вход элемента 13 сравнения и непосредственно на второй вход элемента 13 сравнения. В элементе 13 сравнения сравниваются между собой две величины Р(С;.,) и Р( С-; ), одна из которых соответствует текущему значению вре 4ени oj , а другая - предшествующему ;,, . Если в результате
0
5
0
5
0
5
0
|
такого сравнения окажется, что Р(Г;.|) . Р(С;), то с второго выхода элемента 13 сравнения выдается управляющий сигнал датчика 1 времени, разрешающий выдачу очередного значения Времени i. - 2 ; + Д (У , В противном случае, т.е. при Р(С ;.,) Р(), такой сигнал вьщается с первого выхода элемента 13 сравнения на управляющий второй вход ключа 3, и значение величины Cj t соответствующее требуемой длительности (оперативности) цикла управления, с выхода датчика 1 времени через ключ 3 поступает на выход устройства. На этом работа устройства заканчивается.
Положительный эффект, который дает предлагаемое устройство заключается в том, что оно определяет требуемое значение длительности процесса управления, что позволяет максимизировать вероятность успешного вьтолнения целевьш задач системой и более экономичнее использовать имеющийся ограниченный запас ресурса
Экономический эффект от внедрения предлагаемого изобретения можно оценить величиной выигрыша в выполнении целевых задач системой за счет обеспечения максимума вероятности их выполнения, т.е. W (С) - Р( ), где Р(С) - вероятность успешного выполнения целевых задач системой при оптимальном значении времени 2 цикла управления; РСс ) - вероятность успешного выполнения целевых задач системой без оптимизации длительности с цикла управления; С - полезный эф4)ект, приносимый системой за счет вьтолнения целевых задач.
|
Формула изобретения
|
Устройство дпя определения длительности цикла управления, содержащее датчик времени, выход которого соединен с информационным входом ключа и с входом инвертора, выход которого подключен к входу первого блока деления, выход которого соединен с входом первого блока нелинейности, второй вход первого блока деления является первым входом устройства, второй блок нелинейности, элемент задержки, выход которого подключен к первому входу элемента сравнения, первый выход которого соединен с управляющим входом ключа, вход эле-
мента задержки и второй вход элемента сравнения объединены, первьй и втрой блоки умножения, первый и второй сумматоры, второй выход элемента сравнения соединен с входом датчика времени, отличающееся тем, что, с целью повьшения точности определения длительности цикла управления, в него введен второй блок деления, выход которого соединен с первым входом первого блока умножения, выход которого через второй блок нелинейности подключен к первому входу первого сзл матора, вьпсод которого соединен с входом элемента задержки, выход инвертора подключен к второму входу первого блока умножения, первые входы второго блока умножения и второго сумматора объединены между собой и первым входом
первого блока деления, выход первого блока нелинейности подключен к второму входу первого сумматора, вторые входа вторых блока умножения и сумматора, объединены и являются вторым
входом устройства, выходы второго блока умножения и второго cy № aтopa подключены соответственно к первому и второму входам второго блока деления, выход ключа является выходом
устройства, вторые входы второго сзгмматора и второго блока умножейия объединены и являются вторым входом устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 1992 |
|
RU2020585C1 |
| Устройство для определения оптимального периода технического обслуживания изделий | 1990 |
|
SU1800467A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2015 |
|
RU2604437C2 |
| Устройство для определения оптимального периода технического обслуживания изделий | 1985 |
|
SU1298787A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 1992 |
|
RU2018915C1 |
| Устройство для определения оптимального периода технического обслуживания изделия | 1990 |
|
SU1774359A1 |
| Устройство для определения оптимального периода контроля и технического обслуживания изделия | 1987 |
|
SU1509963A1 |
| Устройство для определения оптимального периода технического обслуживания изделия | 1988 |
|
SU1617453A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 2002 |
|
RU2233481C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО ПЕРИОДА ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ИЗДЕЛИЯ | 1990 |
|
RU2009543C1 |
Изобретение относится к устройствам контроля и управления сложными системами и может быть использовано в автоматизированных системах контроля и управления технологическими процессами. Целью изобретения является повышение точности определения длительности цикла управления системой. Устройство содержит датчик 1 времени, инвертор 2, ключ 3, элемент 4 задержки, блоки 5 и 6 умножения, блоки 7 и 8 деления, блоки 9 и 10 нелинейности, сумматоры 11 и 12, элемент 13 сравнения. Устройство позволяет определить требуемое значение длительности процесса управления, что позволяет повысить вероятность успешного выполнения системой целевых задач и эконосичнее использовать имеющийся ограниченный запас ресурса. 1 ил.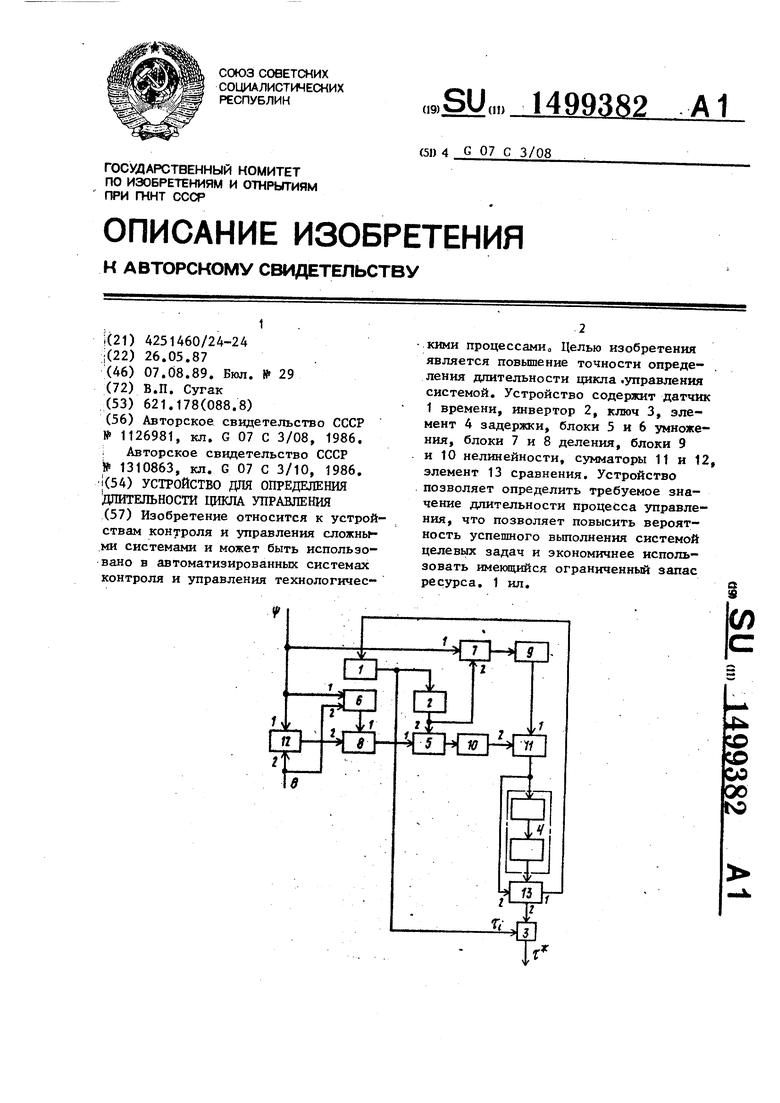
| Устройство для учета и контроля времени оптимального периода технического обслуживания машин | 1983 |
|
SU1126981A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устройство для определения запаса ресурса системы | 1986 |
|
SU1310863A2 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
