Известны индукционные датчики линейных перемещений, содержащие магнитопровод с обмоткой возбуждения и измерительной обмоткой из двух секций, соединенных встречно, два ферромагнитных сердечника, один из которых является компенсационным, а второй кинематически связан с последующим объектом.
Недостатком известных датчиков является ограниченный рабочий диапазон подвижного сердечника, связанного с исследуемым объектом, а также возможные потери магнитного потока, что приводит к нелинейности характеристики датчика.
Предложен индукционный датчик линейных перемещений, в котором вдоль центрального стержня магнитопровода равномерно распределена измерительная обмотка. Два одинаковой формы подвижных ферромагнитных сердечника размещены между крайним и средним стержнями магнитопровода. Такая конструкция позволяет увеличить диапазон измерения, устранить потери мощности магнитного лотока и улучшить линейные характеристики датчика.
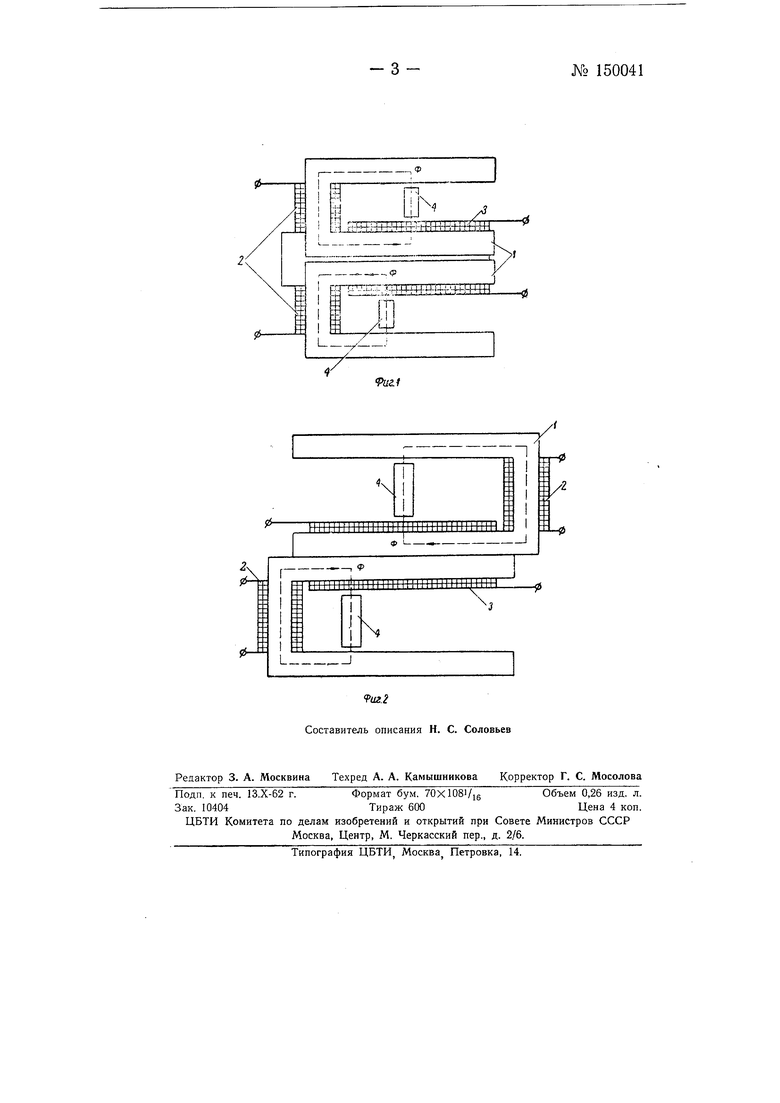
На фиг. 1 изображена принципиальная схема предлагаемого датчика перемещений, содержащего Ш-образный магнитопровод; на фиг. 2- возможный вариант предлагаемого датчика, содержащего S-образный
магнитопровод.
Датчик состоит из двух одинаковых ферромагнитных неподвижных П-образных сердечников /, на которых расположены одинаковые секции обмотки 2 возбуждения, питаемой переменным током .неизменной амплитуды. Два соседних горизонтальных стержня сердечников / охвачены равномерно распределенной измерительной обмоткой 5. Между горизонтальными стержнями сердечников / расположены одинаковые подвижные ферромагнитные сердечники 4, один из которых является компенсационным. Величина диапазона перемещения сердечников 4 обуславливает увеличение диапазона измерения.
№ 150041- 2 -
Магнитные потоки Ф, замыкающ,иеся по подвижным сердечникам, будут равны между собой, так Как намагничивающие силы секции обмотки 2 равны и магнитные сОПротивления, обусловленные одинаковыми воздушными зазорами на пути потоков Ф, также равны. Кроме того, величина магнитных потоков не зависит от положения подвижных сердечников, постоя-нна по модулю и фазе. Обмотка 3 работает на дифференциации потоков Ф, благодаря чему чувствительность увеличивается, а следовательно, потери мощности уменьщаются.
Предмет изобретения
Индукционный датчик линейных перемещений, содержащий Ш- или S-образный магнитопровод с секционированной обмоткой возбуждения, размещенной на коротких стержнях, два подвижных ферромагнитных сердечника, один из которых-компенсационный, отличающийся тем, что, с целью увеличения диапазона измерений, устранения потерь мощности в чувствительном и компенсационном элементах, сохранения -постоянства модуля и фазы рабочих магнитных потоков, измерительная обмотка равномерно распределена вдоль центрального стержня магнитопровода, а чувствительный и компенсационный элементы, выполненные в виде ферромагнитных сердечников одинаковой формы, размещены с зазором между параллельными стержнями магнитопровода с обеих сторон измерительной обмотки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик линейных перемещений | 1959 |
|
SU125168A1 |
| Датчик перемещений | 1960 |
|
SU132975A1 |
| Индукционный датчик перемещений | 1957 |
|
SU120561A1 |
| Индукционный датчик линейных перемещений | 1960 |
|
SU144034A1 |
| Дифференциальный трансформаторный датчик линейных перемещений | 1958 |
|
SU118731A1 |
| Индукционный датчик угловых перемещений | 1960 |
|
SU135789A1 |
| АМПЛИТУДНО-ФАЗОВЫЙ ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ФАЗОВЫМ ВЫХОДОМ | 2001 |
|
RU2208762C1 |
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| Бесконтактный преобразователь линейного перемещения в электрический сигнал | 1978 |
|
SU781576A1 |
| Трансформаторный датчик угла поворота двух объектов | 1991 |
|
SU1810747A1 |
1
41111II nil тип IN HIM III пи и Mill
fer /2
