Изобретение относится к горной промьшшенности, в частности к буровым станкам.
Цель изобретения - повышение производительности бурения.
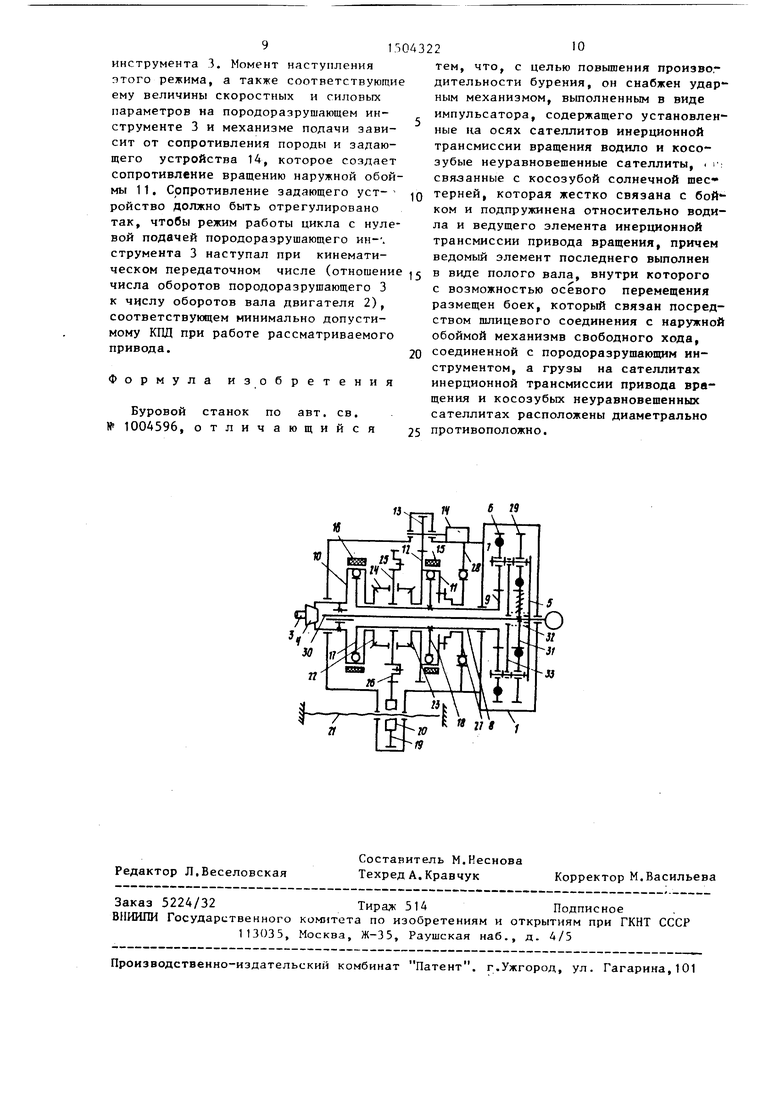
На чертеже изображена кинематическая схема бурового станка.
Буровой станок состоит из корпуса 1, приводного двигателя 2, поро- доразрушающего инструмента 3 с хвостовиком 4, который связан с инерциоь
ной трансмиссией привода вращения, состоящей из ведущего элемента 5, неуравновешенных сателлитов 6, связан- ньк через оси 7 с ведущим элементом 5, ведомого элемента 8, выполненного в виде полого вала, соединенного за одно целое с солнечной шестерней 9, находящейся в зацеплении с неуравновешенными сателлитами 6, двух механизмов свободного хода (МСХ), причем наружная обойма 10 одного из них соеN)
31504
динена с хвостовиком кулачковой муфтой, обеспечивающей жесткую связь хвостовика А и обоймы 10 в окружающе направлении и возможность перемеще- ния хвостовика 4 относительно обоймы
10в осевом (линейном) направлении в определенных пределах (обычно, не более 10... 12 мм) J, а наружная обойма
11другого механизма свободного хода через шестерни 12, 13 соединена с задающим устройством 14, выполненным например, в виде регулировочного насоса с регулируемым сопротивлением
на выходе. При этом обе наружные обоймы 10 и 11 мех снабжены тормозными устройствами 15 и 16 с автономным приводами, а внутренние обоймы 17 и 18 мех жестко установлены на ведомый элемент 8 импульсатора и соединены с механизмом подачи породоразрушающе го инструмента. Этот механизм содержит шестерню 19, гайку 20 и ходовой винт 21. Регулятор механизма подачи вьтолнен в виде дифференциального ме ханизма, включающего центральные колеса 22 и 23, связанные с наружными обоймами 10 и 11 мех пульсатора, сателлиты 24, водило 25, связанное через зубчатый венец 26 с механизмом подачи, механизма свободного хода, внутренняя обойма 27 которого соединена с наружной обоймой 11 противоположно направленного ему механизма свободного хода импульсатора, а на- ружная обойма 28 - с корпусом 1 бурового станка. Косозубые неуравновешенные сателлиты 29, как и неуравновешенные сателлиты 6, связаны через оси 7 с ведущим элементом 5. Причем сателлиты 6 и 29 посажены на оси 7 неподвижно вдоль последних и имеют свободу в окружном направлении, а грузы неуравновешенных сателлитов 29 размещены диаметрально противопо- ложно грузам неуравновешенных сателлитов 6. Боек 30 жестко соединен с солнечной косозубой шестерней 31, которая в зацеплении с неуравновешенными косозубыми сателлитами 29 и на которую опираются пружины 32, Пружины 32 имеют опору на водило 33 и ведомый элемент 5, причем боек 30 связан с наружной обоймой 10 МСХ шли цевьм соединением, подвижным в осево направлении.
Буровой станок работает следующим образом.
,
O
5 0 5 0 О
0
5
Двигатель 2 приводит во вращение }зедущий элемент 5 с неуравновешенными сателлитами 6 и 29. При вращении не- уравновеьченных сателлитов 6 вокруг солнечной шестерни 9, закрепленной на полом валу 8, и вращении неурав- новешенньж сателлитов 29 вокруг солнечной шестерни 31, закрепленной на бойке 30, на вал 8 и боек 30 действуют знакопеременные вращающие моменты, закон изменения которых носит синусоидальный характер с периодом, равным времени одного оборота неуравновешенных сателлитов 6 и 29 относительно собственной оси вращения. Знакопеременный вращающий момент, дей- СТВУЮ1ТИЙ со стороны неуравновешенных сателлитов 6 на солнечную шестерню 9 и вал 8, в зависимости от положения ведущего элемента 5 и вала 8 разгоняет последний до угловой скорости наружных обойм 10 и 11, которые могут вращаться и в процессе работы вращаются только в разные сто- рюны. При этом импульс знакопеременного вращающего момента, действующий в сторону вращения ведущего элемента 5, считается положительным, импульс знакопеременного вращающего момента, действующий в противоположную сторону, - отрицательным. В положительной фазе цикла импульс знакопеременного момента, действующий на вал 8, со стороны неуравновешенных сателлитов 6, вызывает торможение этого вала (разогнанного в противоположную сторону в отрицательной фазе предыдущего цикла), его остановку и разгон до угловой скорости наружной обоймы 10, включение механизма свободного хода, совместный разгон вала 8 с на- ружной обоймой 10 и передачу вращающего момента через хвостовик 4 поро- доразрущающему инструменту 3. Одновременно при вращении сателлитов 6 вокруг солнечной шестерни 9 вращаются и неуравновешенные косозубые сателлиты 29 вокруг солнечной шестерни 31, закрепленной на бойке 30, на которьй также действует знакопеременный вращающий момент. Положительному импульсу знакопеременного вращающего момента импульсатора соответствует отрицательный импульс, создаваемый неуравновешенными сателлитами 29, и наоборот. Импульсы знакопеременных моментов на обойме 10 и бойке 30 должны быть противоположно
направлены, что необходимо для лучшей организации удара, численное значение момента положительного импульса им- пульсатора должно быть в несколько (3-5) раз больше отрицательного импульса момента, создаваемого неуравновешенными косозубыми сателлитами 29, Тогда при вращении обоймы 10 в положительной фазе цикла на боек 30 действует момент, в несколько раз больший, чем противоположно направленный отрицательный импульс момента, созданный, косозубыми неуравновешенными сателлитами 29,
Таким образом, в этом случае момент на бойке 30 в отрицательной фазе не может реализоваться во вращательное движение и за счет косозубого зацепления весь входной момент преобразуется в силу удара, посредством которой боек 30 будет наносить удар по хвостовику 4, что способствует увеличению производительности бурения
передается на задающее устройство 14, В этой же фазе цикла наружная обойма 10 и связанные с ней хвостос вик 4 с породоразрушающим инструментом 3 и центральное колесо 22 вращаются по инерции до тех пор, пока импульс знакопеременного вращающего момента, действующий со стороны неtb уравновешенных косозубых стателлитов 29, не изменит знак на противоположный. Тогда направление действия момента совпадает с направлением вращения обймы 1C, т,е, ее вращение уже
15 будет осуществляться бойком 30, который будет двигаться в осевом направлении, возвращаясь в исходное положение. Разность угловых скоростей центральных колес 22 и 23, как и г
20 прежде, определяет действие механизма подачи, обеспечивая и в этой фазе цикла подачу породоразрушающего инструмента 3 в рабочую зону. Так распределяются положительные и отрица- шпуров в твердых породах, Одновремен- 25 тельные импульсы вращающего момента но с обоймой 10 вращается колесо 22 и осуществляется работа инерционного дифференциального механизма, В этой привода при определенных величинах фазе цикла наружная обойма 11, вра- моментов сил сопротивления на породо- щаясь по инерции, приводит во враще- разрушающем инструменте 3, обуслов- ние связанное с ней центральное коле- о ленных физико-механическими свойствасо 23 дифференциального механизма. Разность скоростей центральных колес 22 и 23, вращающихся в разные стороны, обусловливает переносное движение сателлитов 24 и водила 25 дифференциального механизма с определенной угловой скоростью. Водило 25 жестко соединено с зубчатым венцом 26, который приводит в действие через шестерню 19 гайку 20, перемещая ее вместе с корпусом 1 относительно неподвижного винта 21 подачи, обеспечивая подачу породоразрушающего инструмента 3 в рабочую зону,
В отрицательной фазе цикла импульс знакопеременного вращающего момента, действующий на вал 8 со стороны неуравновешенных сателлитов 6, вызывает торможение этого вала (разогнанного в противоположную сторону в положительной фазе цикла), его остановку и разгон до угловой скорости наружной обоймы 11, после включения мех совместный разгон вала 8, наружной обоймы 11 и связанных с ней шестерни 12 и центрального колеса 23 дифференциального механизма, С шестерни 12 импульс знакопеременного вращающего момента через шестерню 1j
35
40
45
50
55
ми буримой породы.
При этом связанное с наружной , обоймой 11 через шестерни 12 и 13 задающее устройство 14 создает сопротивление вращению обоймы 11, которое может регулироваться по величине, например, путем принудительного изменения сопротивления на выходе гидравлического насоса. Автоматическое распределение мощности приводного двигателя между движениями вращения породоразрушающего инструмента 3 и его подачи механизмом подачи в зависимости от физико-механических свойств буримой породы обеспечивается тем, что величина положительного и отрицательного импульсов знакопеременного вращающего момента, действующего со стороны неуравновешенных сателлитов 6 на ведомый элемент 8, и величина отрицательного и положительного им пульсов знакопеременного вращающего момента, действующего со стороны неуравновешенных косозубых сателлитов 29 на боек 30,тем больше, чем скорость сателлитов 6 и 29 относительно ведущего элемента 5, которая зависит отвеличины момента сил сопротивления на породоразрушающем инструменпередается на задающее устройство 14, В этой же фазе цикла наружная обойма 10 и связанные с ней хвостовик 4 с породоразрушающим инструментом 3 и центральное колесо 22 вращаются по инерции до тех пор, пока импульс знакопеременного вращающего момента, действующий со стороны неуравновешенных косозубых стателлитов 29, не изменит знак на противоположный. Тогда направление действия момента совпадает с направлением вращения обймы 1C, т,е, ее вращение уже
будет осуществляться бойком 30, который будет двигаться в осевом направлении, возвращаясь в исходное положение. Разность угловых скоростей центральных колес 22 и 23, как и г
прежде, определяет действие механизма подачи, обеспечивая и в этой фазе цикла подачу породоразрушающего инструмента 3 в рабочую зону. Так рас5
0
5
0
5
ми буримой породы.
При этом связанное с наружной , обоймой 11 через шестерни 12 и 13 задающее устройство 14 создает сопротивление вращению обоймы 11, которое может регулироваться по величине, например, путем принудительного изменения сопротивления на выходе гидравлического насоса. Автоматическое распределение мощности приводного двигателя между движениями вращения породоразрушающего инструмента 3 и его подачи механизмом подачи в зависимости от физико-механических свойств буримой породы обеспечивается тем, что величина положительного и отрицательного импульсов знакопеременного вращающего момента, действующего со стороны неуравновешенных сателлитов 6 на ведомый элемент 8, и величина отрицательного и положительного им пульсов знакопеременного вращающего момента, действующего со стороны неуравновешенных косозубых сателлитов 29 на боек 30,тем больше, чем скорость сателлитов 6 и 29 относительно ведущего элемента 5, которая зависит отвеличины момента сил сопротивления на породоразрушающем инструмен
те 3; наружные обоймы 10 и 11 МСХ импульсатора соединены между собой через дифференциальный механизм, а водило 25 дифференциального механиз- ма кинематических связано с механизмом подачи породоразрушающего инструмента 3; наружная обойма 10 МСХ, передающая вращение породоразрушающеу инструменту 3, связана с бойком 30 шлидевым соединением, подвижным в со осевом направлении. Так, например, увеличение момента сил сопротивления на породоразрушающем инструменте 3 приводит к уменьшению угловой скорости наружной обоймы 10 и связанного с ней центрального колеса 22 дифференциального механизма, а угловая скорость наружной обоймы 11 и связанного с ней центрального колеса 23 возрастает, что приводит к уменьшению разности скоростей центральных колес 22 н 23 и уменьшению угловых скоростей водила 25, зубчатого венца 26, шестерни 19 и гайки 20, в результа- те чего уменьшается величина подачи породоразрушающего инструмента 3. Дд новременно происходит уменьшение угловой скорости вала 8 в направлении действия положительного импульса знакопе- ремецного вращающего момента импульса- тора, а также уменьшение угловой скорости бойка 30 в направлении действи отрицательного импульса знакопеременного вращающего момента ударника и увеличение относительных скоростеА 6 во время отрицательной фазы цикла импульсатора и сателлитов 29 во время положительной фазы цикла ударника. Вследствие этого увеличивается положительный импульс момента импульсатора и отрицательный импульс ударника, что необходимо для праэдоления моментов сил сопротивления на породоразрушающем инструменте 3, т.е. увеличивается крутящий момент и параметры удара на породоразрушающем инструменте 3, в результате обеспечивается более высокая производительность бу- рового станка. При этом увеличение относительных скоростей неуравнове- шенных сателлитов 6 и 29 во время соответствующих фаз циклов пропорционально увеличению момента сил сопротивления, причем каждому значению момента сил сопротивления соответст- вуют определенные значения относительных скоростей неуравновешенных сателлитов 6 и 29 и величины импуль
5
0
5 0 5
0
5
0
5
сов соответствующих знаков знакопеременных вращающих моментов, создаваемых импульсатором и ударным механизмом.
С увеличением момента сил сопротивления на породоразрушающем инструменте 3 происходит автоматическое бесступенчатое уменьшение угловой скорости породоразрушающего инструмента 3, увеличение знакопеременного вращающего момента на нем и увеличение параметров (энергии) удара. Увеличенная ударная нагрузка позволяет породоразрушающему инструменту в внедриться в породу -на большую глубину. В результате этого происходит значительно большее разрушение породы (скалывание, смятие), чем при статическом воздействии на породоразру- шающий инструмент, а также разрушение еще неразрушенной горной породы (образование трещин, отслаивание), тем самым снижается крепость породы. Поэтому возросший вращающий момент обеспечивает более эффективное резание породы заглубленным инструментом. При этом уменьшается величина подачи породоразрзппающего инструмента. С уменьшением величины подачи прогрессирующее падение угловой скорости породоразрушающего инструмента 3 прекращается, что приводит к выходу инерционного привода бурового станка на новый установившийся режим работы с локализацией изменений скоростных и силовых параметров в определенной области, определяемой сопротивлением породы и задающего устройства. При значительном увеличении момента сил сопротивления на породоразрушающем инструменте 3 значения положительного импульса знакопеременного вращающего момента импульсатора и отрицательного импульса знакопеременного вращающего момента ударника макси- мально возрастают, т.е. вращающий момент и показатели (энергий) удара на породоразрушающем инструменте 3 достигают своих максимальных значений, которые может обеспечить привод бурового станка. Если же и после этого момент сил сопротивления будет не преодолен на породоразрущающем инструменте 3, то разность угловых скоростей центральных колес 22 и 23 станет равной нулю, что соответствует режиму работы инерционного привода с нулевой подачей породоразрушающего
инструмента 3. Момент наступления этого режима, а также соответствующие ему величины скоростных и силовых параметров на породоразрушающем инструменте 3 и механизме подачи зависит от сопротивления породы и задающего устройства 14, которое создает сопротивление вращению наружной обоймы 11. Сопротивление задающего уст- ройство должно быть отрегулировано так, чтобы режим работы цикла с нулевой подачей породоразрушающего ий- . струмента 3 наступал при кинемати О
что, с целью повышения произвог
дительности бурения, он снабжен ударным механизмом, выполненным в виде импульсатора, содержащего установленные на осях сателлитов инерционной трансмиссии вращения водило и косо- зубые неуравновещенные сателлиты, г-. связанные с косозубой солнечной шес- терней, которая жестко связана с бойком и подпружинена относительно водила и ведущего элемента инерционной трансмиссии привода вращения, причем ведомый элемент последнего выполнен
| название | год | авторы | номер документа |
|---|---|---|---|
| Вращательно-ударная бурильная головка | 1987 |
|
SU1434096A1 |
| Буровой станок | 1981 |
|
SU1004596A1 |
| Инерционно-импульсная передача | 1989 |
|
SU1739151A1 |
| Питатель для порошковых материалов | 1981 |
|
SU979243A2 |
| Станок для нарезания резьб | 1987 |
|
SU1484496A1 |
| Привод камнерезной машины | 1977 |
|
SU707809A1 |
| Устройство для очистки поверхности | 1989 |
|
SU1662712A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| Привод щелереза | 1981 |
|
SU972015A1 |
| Инерционно-импульсная бесступенчатая передача | 1980 |
|
SU929925A1 |
Изобретение относится к горному оборудованию. Цель - повышение производительности. Буровой станок включает корпус 1, приводной двигатель 2, породоразрушающий инструмент 3 с хвостовиком 4, связанным с инерционной трансмиссией привода вращения. Последняя включает ведущий элемент 5, неуравновешенные сателлиты (С)6, связанные через оси 7 с элементом 5, и ведомый элемент, выполненный в виде полого вала 8, внутри которого с возможностью осевого перемещения размещен боек 30. Боек 30 жестко соединен с солнечной косозубой шестерней (Ш)31, которая находится в зацеплении с неуравновешенными косозубыми С 29. На Ш31 опираются и пружины 32, имеющие опору на водило 33 и элемент 5. Шлицевым соединением боек 30 связан с наружной обоймой 10 механизма свободного хода. Наружная обойма 10 соединена с породоразрушающим инструментом 3. Грузы С 29 размещены диаметрально противоположно грузам С6. Двигатель 2 приводит во вращение элемент 5 с неуравновешенными С6 и 29. При вращении С6 вокруг Ш9 и С29 вокруг Ш31 на вал 8 и боек 30 действуют знакопеременные вращающие моменты. С увеличением момента сил сопротивления на породоразрушающем инструменте 3 происходит автоматическое бесступенчатое уменьшение угловой скорости породоразрушающего инструмента 3 и увеличение энергии удара. 1 ил.
ческом передаточном числе (отношение в виде полого вала, внутри которого
числа оборотов породоразрушающего 3 к числу оборотов вала двигателя 2), соответствующем минимально допустимому КПД при работе рассматриваемого привода.20
Формула изобретения
Буровой станок по авт. св. № 1004596, отличающийся 25
с возможностью осевого перемещения размещен боек, который связан посред ством шлицевого соединения с наружно обоймой механизмв свободного хода, соединенной с породоразрушающим инструментом, а грузы на сателлитах инерционной трансмиссии привода вращения и косозубых неуравновешенных сателлитах расположены диаметрально противоположно.
10
J//
с возможностью осевого перемещения размещен боек, который связан посредством шлицевого соединения с наружной обоймой механизмв свободного хода, соединенной с породоразрушающим инструментом, а грузы на сателлитах инерционной трансмиссии привода вращения и косозубых неуравновешенных сателлитах расположены диаметрально противоположно.
иWб 79
mL JJ1 «t 11
1
Jrf/У
| Буровой станок | 1981 |
|
SU1004596A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
