Изобретение относится к машиностроению и может быть использовано в качестве автоматического привода, где упрощено управление путем сообщения исполнительному органу движений различных видов без регулирующего устройства, в частности в горных машинах, в станках и т. п.
Известна инерционно-импульсная передача, содержащая корпус, импульсатор с ведомым звеном, основной и дополнительные органы, два основных механизма свободного хода (МСХ) противоположного действия, внутренние обоймы которых соединены с ведомым звеном импульсатора, а наружные обоймы - с исполнительными органами, два дополнительных МСХ, внутренняя обойма каждого из которых соединена с наружной обоймой основного МСХ противоположного действия дополнительному МСХ, а наружные - с корпусом передачи.
Преимуществом передачи является то, что она обеспечивает привод соосных исполнительных органов машины с разносторонним вращением, у которой в процессе работы имеет место силовое взаимодействие исполнительных органов друг с другом через рабочую среду. Однако отсутствие в этой передачи автоматического распределения энергии между исполнительными органами в зависимости от условий их работы, ограничивает возможность повышения производительности передачи, а имеющие место непроизводительные потери энергии снижают ее КПД.
Наиболее близкой из известных передач к предложенной является инерционно- импульсная бесступенчатая передача, содержащая корпус, импульсатор с ведомым звеном, основной и дополнительный исполнительные органы, два управляемых тормоза, два основных механизма свободного хода противоположного действия, внутренние обоймы которых соединены с ведомым звеном импульсатора, а наружные обоймы связаны с соответствующими тормозами и кинематически связаны с исполнительными органами, дополнительный механизм свободного хода, посредством которого наружная обойма одного из основных механизмов свободного хода связана с корпусом, дифференциальный механизм, звенья которого посредством двух зубчатых передач связаны с соответствующими наружными обоймами основных механизмов свободного хода, а водило - с дополнительным исполнительным органом, регулирующее устройство, кинематически связанное с наружной обоймой одного из основных механизмов свободного хода.
Преимуществом известной передачи является то, что в ней имеет место автоматическое распределение энергии между исполнительными органами в зависимости от
условий их работы, что повышает производительность передачи и снижает непроизводительные потери энергии. Вместе с тем наличие в передаче задающего устройства делает ее сложной в управлении.
0 Цель изобретения - упрощение управления передачи путем сообщения исполни- тельномуорганудвижений различных видов без регулирующего устройства.
Для достижения этой цели в инерционно5 импульсной передаче, содержащей корпус, импульсатор с ведомым звеном, исполнительный орган, два управляемых тормоза, два основных механизма свободного хода противоположного действия, внутренние
0 обоймы которых соединены с ведомым звеном импульсатора, а наружные обоймы связаны с соответствующими тормозами и кинематически связаны с исполнительным органом, и дополнительный механизм сво5 бедного хода, посредством которого наружная обойма одного из основных механизмов свободного хода связана с корпусом, исполнительный орган выполнен в виде винта, кинематическая связь последнего с наруж0 ными обоймами выполнена в виде двух зубчатых механизмов с передаточными отношениями разных знаков, в одном из которых ведомое колесо предназначено для вращения винта с возможностью его осево5 го перемещения, а в другом механизме ведомое звено выполнено в виде гайки для взаимодействия с винтом.
На чертеже изображена схема инерционно-импульсной передачи.
0 Передача содержит корпус 1, импульсатор, включающий связанное с двигателем (не показано) ведущее звено 2, неуравновешенные сателлиты 3, связанные через оси 4 с ведущим звеном 2, и ведомое звено 5,
5 выполненное в виде вала с центральным колесом 6, взаимодействующее с неуравновешенными сателлитами 3, исполнительный орган 7 с инструментом 8, два основных механизма свободного хода противополож0 ного действия, внутренние обоймы 9 и 10 которых соединены с ведомым звеном 5, а наружные обоймы 11 и 12 связаны с двумя управляемыми тормозами 13 и Неавтономными приводами и кинематически связаны
5 с исполнительным органом 7, который выполнен в виде винта.
Кинематическая связь исполнительного органа 7 с наружными обоймами 11 и 12 выполнена в виде двух зубчатых механизмов, состоящих соответственно из шестерен 15-19 с передаточными отношениями разных знаков, в одном из которых ведомое звено 17 выполнено в виде гайки 20 для взаимодействия с винтом 7, а в другом механизме ведомое колесо 19 предназначено для вращения винта 7 с возможностью его осевого перемещения, например, с использованием подвижного шпоночного соединения 21. Опоры 22 и 23 ведомых звеньев 17 и 19 зубчатых механизмов расположены в корпусе 1. Передача содержит дополнительный механизм свободного хода, внутренняя обойма 24 которого соединена с наружной обоймой 12 основного механизма свободного хода, причем последний и дополнительный механизм свободного хода - противоположного действия. Наружная обойма 25 соединена с корпусом 1. Инерционно-импульсная передача работает следующим образом.
Ведущее звено 2 с неуравновешенными сателлитами 3 приводится во вращение от двигателя. При вращении неуравновешенных сателлитов 3 вокруг солнечной шестерни 6 на ведомое звено действует знакопеременный вращающий момент синусоидального характера с периодом, равным времени одного оборота неуравновешенных сателлитов 3 относительно собственной оси вращения. Этот знакопеременный вращающий момент, в зависимости от относительного положения ведущего звена 2 и ведомого звена 5, разгоняет последнее до угловой скорости наружных обойм 11 и 12, которые вращаются в разные стороны. Действующий на ведомое звено 5 импульс вращающего момента считается положительным, если направление его действия совпадает с направлением вращения ведущего звена 2, и - отрицательным, если направление его действия не совпадает с направлением вращения ведущего звена 2.
Инерционно-импульсная передача работает циклически. В положительной фазе цикла импульс знакопеременного вращающего момента, действующий на ведомое звено 5 со стороны неуравновешенных сателлитов 3, вызывает торможение ведомого звена 5 (разогнанного в противоположную сторону в отрицательной фазе предыдущего цикла), включение основного МСХ, совместный разгон ведомого звена 5 с наружной обоймой 11 и передачу положительного импульса вращающего момента на выполненный в виде винта исполнительный орган 7 через шестерни 18, 19 зубчатого механизма и подвижное шпоночное соединение 21. При этом исполнительный орган 7 посредством взаимодействия винта и гайки 20 перемещается вдоль своей оси по направлению в забой (вправо от ведущего звена 2). В этой фазе цикла наружная обойма 12 и связанные с ней шестерни 15-17 другого зубчатого механизма, вращаясь по инерции, приводят во вращение гайку 20.
Направление вращения винта исполнительного органа 7 совпадает с направлением вращения гайки 20. Разность угловых
0 скоростей винта и гайки 20 обуславливает поступательное перемещение исполнительного органа 7 вдоль оси (величину и направление этого перемещения). Если угловая скорость гайки 20 больше угловой скорости
5 винта, то исполнительный орган 7 перемещается из забоя (влево от ведущего звена 2). Если угловая скорость гайки меньше угловой скорости винта, то исполнительный орган 7 перемещается в забой (вправо от
0 ведущего звена 2).
В отрицательной фазе цикла импульс знакопеременного вращающего момента, действующий на ведомое звено 5 со стороны неуравновешенных сателлитов 3, вызы5 вает торможение ведомого звена 5 (разогнанного в противоположную сторону в положительной фазе цикла), его остановку и разгон до угловой скорости наружной обоймы 12 и затем, после включения основ0 ного МСХ, совместный разгон ведомого звена 5, наружной обоймы 12 и связанной с ней через шестерни 15-17 зубчатого механизма гайки 20. В этой фазе цикла наружная обойма 11 и связанные с ней шестерни 18, 19
5 другого зубчатого механизма, вращаясь по инерции, приводят во вращение исполнительный орган 7, который, взаимодействуя с гайкой 20 посредством винта, перемещается вдоль оси.
0 При этом имеют место следующие режимы работы.
Режим движения в забой. Тормозные устройства 13 и 14 не работают, на инструменте 8 (а следовательно, и исполнительном
5 органе 7) отсутствует момент сил полезных сопротивлений и сила сопротивления поступательному перемещению исполнительного органа в забой. В этом случае угловая скорость исполнительного органа 7 больше
0 угловой скорости шестерни 17 с гайкой 20, так как при отсутствии сопротивления на исполнительном органе, а следовательно, и на наружных обоймах 11 и 12, имеет место вращение наружной обоймы 11 с большей
5 угловой скоростью, чем угловая скорость наружной обоймы 12 (по абсолютной величине). Это объясняется тем, что величина передаваемого на наружную обойму 11 положительного импульса вращающего момента несколько больше, чем величина
отрицательного импульса, передаваемого на наружную обойму 12 (и эта разница тем больше, чем больше угловая скорость наружной обоймы 11). С учетом изложенного имеет место поступательное перемещение вдоль оси исполнительного органа 7 в направлении забоя.
Режим работы в забое. Тормозные устройства 13 и 14 не работают, на исполнительный орган 7 действует момент сил полезных сопротивлений и сила сопротивления поступательному перемещению исполнительного органа 7 в забой. С появлением момента сил полезных сопротивлений на исполнительном органе 7 угловая скорость последнего бесступенчато уменьшается, что сопровождается увеличением импульсов вращающего момента, передаваемых на наружные обоймы 11 и 12. По этой п ричине угловая скорость наружной обоймы 12, а следовательно, и шестерни 17 с гайкой 20, возрастает.
Возрастанию угловой скорости наружной обоймы 12, шестерни 17 с гайкой 20 препятствует увеличившийся момент трения в паре винт-гайка, который возникает с появлением силы сопротивления поступательному перемещению исполнительного органа 7 в забой. Момент трения в паре винт-гайка, приведенный к наружной обойме 12, выполняет роль реактивного момента в предлагаемой передаче. С появлением этого момента связано увеличение импульсов вращающего момента, передаваемых на наружные обоймы 11 и 12, происходящее при возникновении сил полезных сопротивлений. Разность угловых скоростей винта 8 и гайки 20 уменьшается, за счет чего уменьшается скорость поступательного перемещения вдоль оси исполнительного органа 7. В результате происходит стабилизация режима работы передачи, при этом между скоростью поступательного перемещения исполнительного органа 7 и его угловой скоростью устанавливается определенное соотношение, зависящее от параметров передачи.и физико-механических свойств обрабатываемого материала (которые определяют моменты сил полезных сопротивлений и силы сопротивления поступательному перемещению исполнительного органа 7 при его работе в забое).
При дальнейшем возрастании момента сил полезных сопротивлений, приложенных к исполнительному органу 7, разность угловых скоростей винта 8 и гайки 20 еще больше уменьшается. В случае, когда рассматриваемая разность угловых скоростей изменит знак, поступательное перемещение вдоль оси исполнительного органа 7
также изменит знак, т. е. будет иметь место режим реверса. Рассмотренные особенности работы передачи позволяют работать исполнительному органу без перегрузок и,
в случае возникновения, автоматически устранять аварийные ситуации, связанные с заклиниванием инструмента 8.
Передача обладает автоматическим распределением энергии по направлениям
осуществления различных видов движений (вращательного и поступательного) исполнительного органа 7 в зависимости от условийработы,определяемых физико-механических свойствами обрабатываемого материала. Так, например, увеличение момента сил полезных сопротивлений на исполнительном органе 7 приводит к уменьшению угловой скорости последнего, при этом угловая скорость гайки
20 увеличивается. Все это приводит к умено- шению скорости поступательного движения исполнительного органа 7 вдоль оси. С уменьшением скорости поступательного движения исполнительного органа 7 уменьшается величина момента сил полезных сопротивлений на инструменте 8, что приводит к прекращению прогрессирующего падения угловой скорости исполнительного органа 7, стабилизации скорости
поступательного движения и выходу передачи на новый установившийся режим работы с локализацией изменений силовых факторов, осуществляющих движение в двух направлениях.
Режим принудительного движения из забоя. Тормозное устройство 13 работает, тормозное устройство 14 не работает. При этом наружная обойма 11, шестерни 18, 19 и исполнительный орган 7 не вращаются.
Вращение гайки 20 трансформируется в поступательное перемещение исполнительного органа 7 вдоль оси из забоя.
Режим принудительного движения в забой. Тормозное устройство 14 работает,
тормозное устройство 13 не работает. При этом наружная обойма 12, шестерни 15-17 и гайка 20 не вращаются. Вращение исполнительного органа 7 трансформируется посредством кинематической пары
винт-гайка в его поступательное перемещение вдоль оси в сторону забоя.
Столовый режим работы передачи имеет место при работающих тормозных устройствах 13 и 14. В этом случае ведущее
звено 2 с неуравновешенными сателлитами 3 будут вращаться относительно ведомого звена 5. Все остальные элементы передачи будут неподвижны.
В момент пуска передачи наружная
обойма 12 вследствие трения в МСХ может
начать вращение по направлению движению наружной обоймы 11, что создает кинематическую неопределенность в движении звеньев передачи. Для исключения этого явления установлен дополнительный МСХ.
Использование инерционно-импульсной передачи, например, в горных машинах позволяет упростить управление, а также улучшить их динамические свойства и увеличить долговечность.
Формула изобретения
Инерционно-импульсная передача, содержащая корпус, импульсатор с ведомым звеном, исполнительный орган, два управляемых тормоза, два основных механизма свободного хода противоположного действия, внутренние обоймы которых соединены с ведомым звеном импульсатора, а
наружные обоймы связаны с соответствующими тормозами и кинематически связаны с исполнительным органом, и дополнительный механизм свободного хода, посредством которого наружная обойма одного из основных механизмов свободного хода связана с корпусом, отличающаяся тем, что, с целью упрощения управления путем сообщения исполнительному органу движений различных видов без регулирующего устройства, исполнительный орган выполнен в виде винта, кинематическая связь последнего с наружными обоймами выполнена в виде двух зубчатых механизмов с передаточными отношениями разных знаков, в одном из которых ведомое колесо предназначено для вращения винта с возможностью его осевого перемещения, а в другом механизме ведомое звено выполнено в виде гайки для взаимодействия с винтом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесступенчатая импульсная передача | 1981 |
|
SU1037000A1 |
| Привод камнерезной машины | 1977 |
|
SU707809A1 |
| Инерционно-импульсная бесступенчатая передача | 1980 |
|
SU929925A1 |
| Буровой станок | 1987 |
|
SU1504322A2 |
| Инерционно-импульсная передача | 1980 |
|
SU1043395A1 |
| Буровой станок | 1981 |
|
SU1004596A1 |
| Стенд для испытания карданных передач | 1989 |
|
SU1712804A1 |
| Станок для нарезания резьб | 1987 |
|
SU1484496A1 |
| Инерционно-импульсная передача | 1981 |
|
SU1011942A1 |
| Устройство для очистки внутренней поверхности трубопроводов | 1989 |
|
SU1664425A1 |
Использование: автоматические приводы в машинах, где исполнительному органу сообщается движение различных видов. Передача содержит корпус 1, импульсатор, исполнительный орган 7, два управляемых тормоза 13 и 14, два основных и один дополнительный механизмы свободного хода противоположного действия. Внутренние ,8 И Л обоймы 9 и 10 основных механизмов свободного хода соединены с ведомым звеном 5 импульсатора, а наружные обоймы 11 и 12 связаны с соответствующими тормозами и кинематически с исполнительным органом 7, внутренняя обойма 24 дополнительного механизма свободного хода соединена с наружной обоймой 12 основного механизма свободного хода, а наружная обойма 25 соединена с корпуса 1. Исполнительный орган 7 связан с инструментом 8 и выполнен в виде винта, кинематическая связь последнего с наружными обоймами 11 и 12 выполнена в виде двух зубчатых механизмов с передаточными отношениями разных знаков, в одном из которых ведомое колесо 19 предназначено для вращения винта с возможностью его осевого перемещения, а в другом механизме ведомое звено 17 выполнено в виде гайки 20 для взаимодействия с винтом. 1 ил. (Л С S if 12 Ю / VI GJ Ю сл 17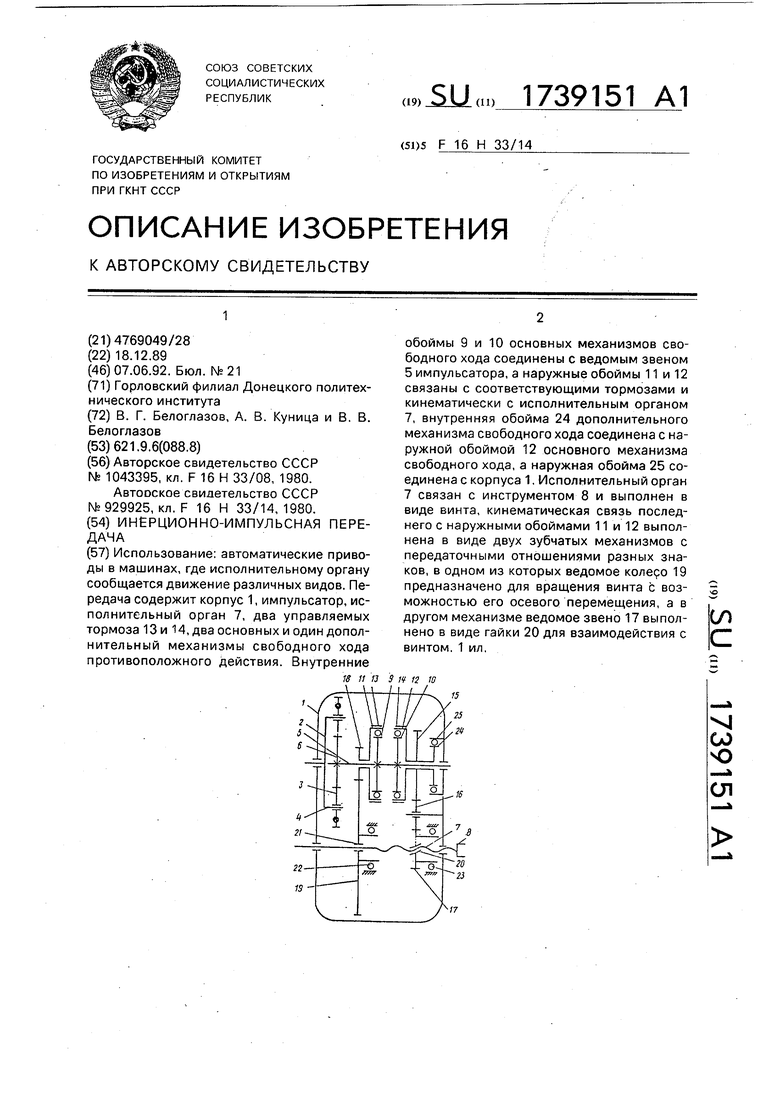
Редактор В.Данко
Составитель В.Белоглазое
Техред М.МоргенталКорректор Н.Король
Заказ /,-J
Тираж
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
Подписное
| Инерционно-импульсная передача | 1980 |
|
SU1043395A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Инерционно-импульсная бесступенчатая передача | 1980 |
|
SU929925A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
