СП
00
со
. 3150
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений.
Целью изобретения является повьппе- ние точности преобразователя за счет исключения влияния на результат преобразования параметров линии связи, соединяющей датчик с преобразователем и входной емкости преобразовате-. ля, параллельной емкости датчика.
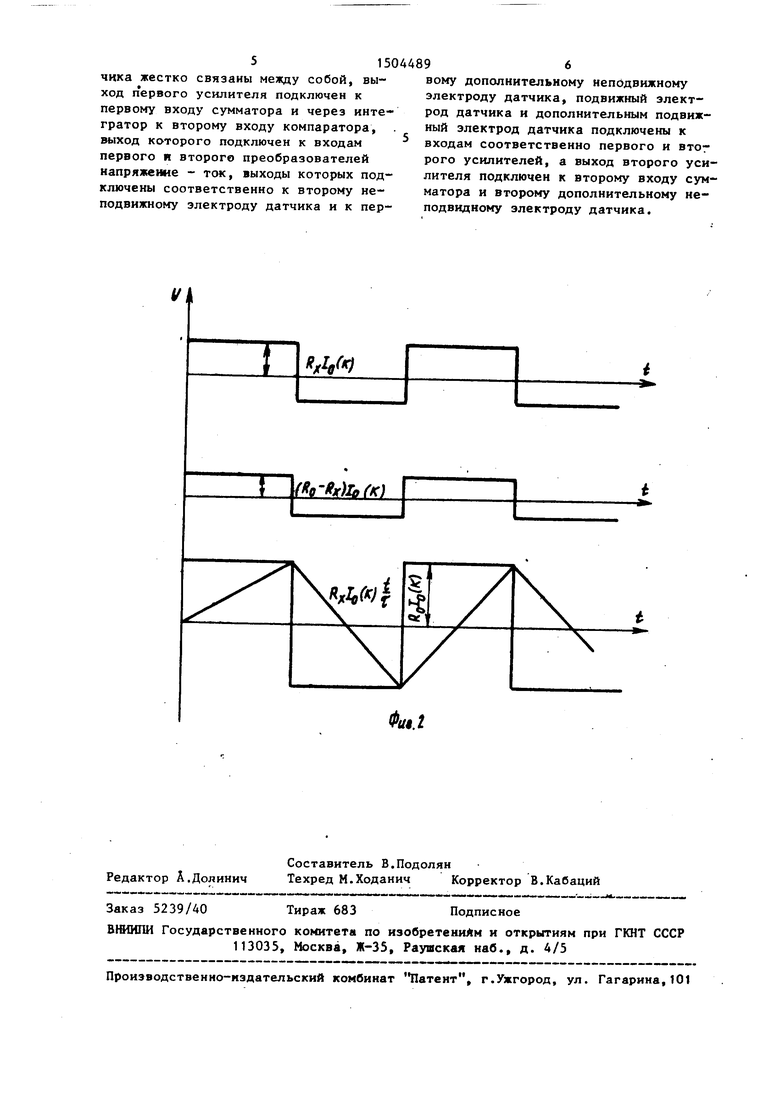
На фиг. 1 приведена блок-схема преобразователя; на фиг. 2 - временная диаграмма его работы.
Преобразователь содержит дифференциальный датчик 1 с электродами 2 7,усилители 8,9, преобразователь 10 напряжение - ток, интегратор 11, преобразователь 12 напряжение - ток, сумматор 13, компаратор 14. Выход компаратора 14 соединен со входами преобразователей 10 и 12, входы компаратора 14 подключены к выходам интегратора 11 и сумматора 13, входы сумматора 13 подключены к вы-
ходам усилителей 8 и 9, а вход интегратора подключен к выходу усилителя
8,выходы преобразователей 10 и 12 соединены соответственно с 2 и 6 неподвижными электродами датчика 1, дв других неподвижных электрода 3 и 5 подключены к выходам соответственно усилителей 8 и 9, подвижный электрод
4 соединен со входом усилителя 8, а подвижный электрод 7 со входом уси- лителя 9.
Преобразователь работает следующим образом.
В начальный момент времени (момент включения) на выходе компара тора 14 присутствует постоянное напряжение, например, отрицательное U, KOTQpoe подается на преобразователи 10,12 напряжение - ток, они в свою очередь вырабатывают ток, одинаковый по значению:
.1.0 t - Дифференциальный датчик 1 представляет собой два Идентичных датчика, подвижные электроды 4,7 которых механически связаны между собой и с перемещающимся объектом. Оба датчика питаются одинаковым током 1 и включены в обратную связь инвертирующих усилителей 8 и 9. Сигнал на выходе каждого запишется следующим образом. и,ККДо,
( х) Id
89
З
0
5
0
5
0
0
где R - сопротивление датчика 1 между электродами 4 и 3 или между электродами 7 и 6; () - сопротивление датчика 1 меяду электродами 2 и 4 или 5 и 6;
К - коэффициент, определяемый параметрами линии связи, одинаковый для обоих усилителей 8,9.
На выходе сумматора 13 будет присутствовать сигнал, равный:
U,,-K.R,I,
который не зависит от положения подвижных электродов 4 и 7. На выходе интегратора 11 напряжение изменяется по закону:
и 11 K. 1(у
где С - постоянная времени интегратора;
t - время интегрирования. Оба сигнала U,j и U,, подаются на входы компаратора 14 и в момент их равенства напряжение на компараторе 14 изменит полярность, после чего весь процесс повторяется, т.е. .схема работает в режиме релаксационных колебаний, частота которых определяется из условия
KR,,,.
и не зависит от параметров линии связи между датчиком и преобразователем.
Формула изобретения
Бесконтактный преобразователь перемещения в частоту, содержащий ре- зистивно-емкостный датчик с двумя неподвижными и одним подвижным электродами, первый усилитель, интегратор, компаратор и сумматор, выход которого подключен к первому входу компаратора, выход первого усилителя подключен к первому неподвижному электроду датчика, отличающий- с я тем, что, с целью повышения точности, в него введены второй усилитель и два преобразователя напряжение - ток, а резистивно-емкостный датчик вьтолнен дифференциальным с двумя дополнительными неподвижными электродами и одним дополнительным подвижным электродом, подвижный и дополнительный подвижный электроды дат чика жестко связаны между собой, выход первого усилителя подключен к первому входу сумматора и через интегратор к второму входу компаратора, выход которого подключен к входам первого н второго преобразователей напряжение - ток, выходы которых подключены соответственно к второму неподвижному электроду датчика и к первому дополнительному неподвижному электроду датчика, подвижный электрод датчика и дополнительным подвижный электрод датчика подключены к входам соответственно первого и второго усилителей, а выход второго усилителя подключен к второму входу сумматора и второму дополнительному не- подвидному электроду датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь малых перемещений в период электрических колебаний | 1976 |
|
SU667985A1 |
| Преобразователь линейных перемещений в частотный сигнал | 1984 |
|
SU1180676A1 |
| Преобразователь перемещения в частоту | 1985 |
|
SU1317283A1 |
| Преобразователь перемещений в частоту электрических колебаний | 1985 |
|
SU1267154A1 |
| Бесконтактный преобразователь перемещений | 1990 |
|
SU1716308A1 |
| Способ преобразования положения подвижного бесконтактного токосъемника резистивно-емкостного датчика | 1987 |
|
SU1446451A1 |
| Емкостный трансформаторный мостдля изМЕРЕНия пЕРЕМЕщЕНий | 1979 |
|
SU823828A1 |
| Измеритель сопротивления кондуктометрического датчика | 1980 |
|
SU898342A1 |
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ВОЗДУШНОЙ СКОРОСТИ | 2010 |
|
RU2445634C2 |
| Преобразователь разбаланса дифференциальных датчиков в интервал времени | 1981 |
|
SU980277A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений. С целью повышения точности за счет исключения влияния на результат преобразования параметров линии связи, соединяющей датчик с преобразователем, в преобразователь, содержащий усилитель 8, интегратор 11, сумматор 13, компаратор 14, введены дифференциальный резистивно-емкостной датчик 1 с электродами 2...7, усилитель 9 и преобразователи 10, 12 напряжение-ток. На входах компаратора 14 формируются два напряжения: одно линейно изменяющееся, пропорциональное перемещению, другое независящее от перемещения и времени, определяющее порог срабатывания компаратора. Параметры линии связи одинаково влияют на оба напряжения, что позволяет исключить влияние линии связи на информационный сигнал преобразователя. 2 ил.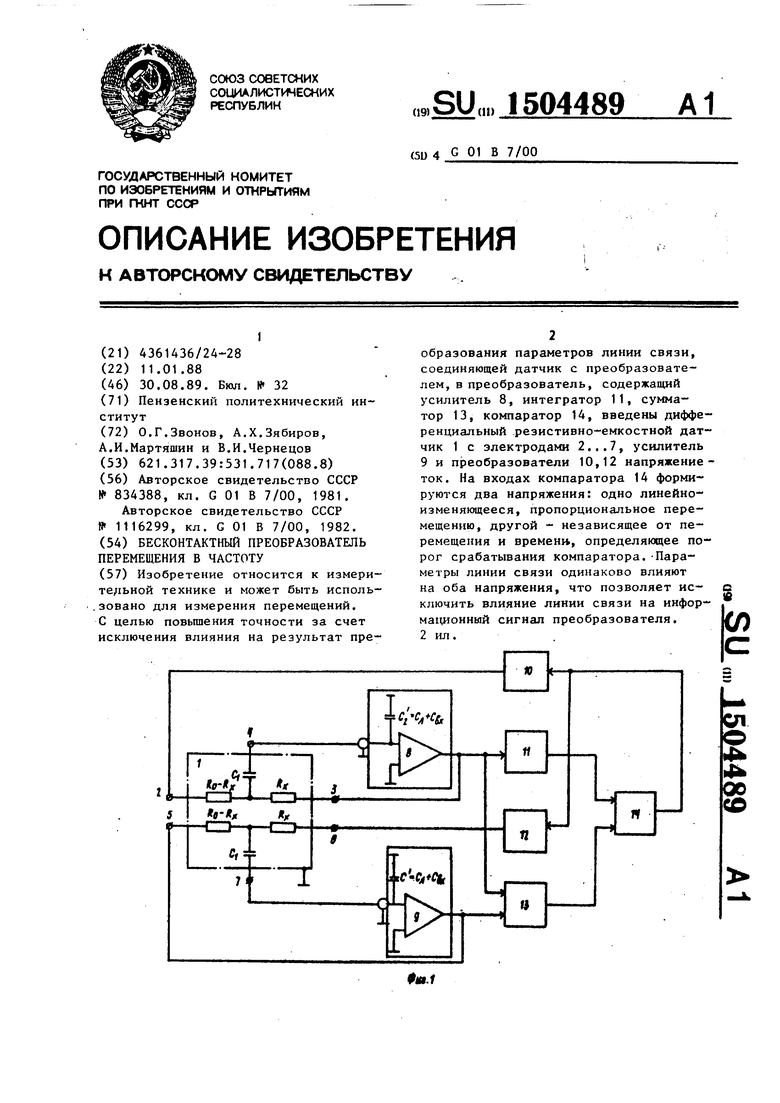
)
| Потенциометр переменного тока дляизМЕРЕНия пЕРЕМЕщЕНий | 1979 |
|
SU834388A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бесконтактный преобразователь перемещений с частотным выходом | 1982 |
|
SU1116299A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
