o HKi-9D
00
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ частотно-импульсного регулирования резонансного преобразователя с фазовой автоподстройкой ширины импульса | 2017 |
|
RU2662228C1 |
| Способ широтно-импульсного регулирования резонансного преобразователя с фазовой автоподстройкой частоты коммутации | 2017 |
|
RU2661495C1 |
| Способ автоподстройки частоты автономного инвертора | 1975 |
|
SU738073A1 |
| Способ регулирования выходного напряжения двухмостового автономного инвертора с резонансной нагрузкой | 1986 |
|
SU1411900A1 |
| Способ управления преобразователем частоты и устройство для его осуществления | 1978 |
|
SU764090A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ИНВЕРТОРА НАПРЯЖЕНИЯ | 2000 |
|
RU2183379C1 |
| Индукционная плавильная установка | 1983 |
|
SU1145494A1 |
| Регулируемый преобразователь переменного трехфазного напряжения в однофазное для питания индукционной нагрузки | 1983 |
|
SU1130990A1 |
| Регулируемый преобразователь переменного напряжения в переменное | 1982 |
|
SU1128350A1 |
| СПОСОБ УПРАВЛЕНИЯ СТАТИЧЕСКИМИ СТАБИЛИЗИРОВАННЫМИ ИСТОЧНИКАМИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ, РАБОТАЮЩИМИ ПАРАЛЛЕЛЬНО НА ОБЩУЮ НАГРУЗКУ | 2008 |
|
RU2379812C1 |
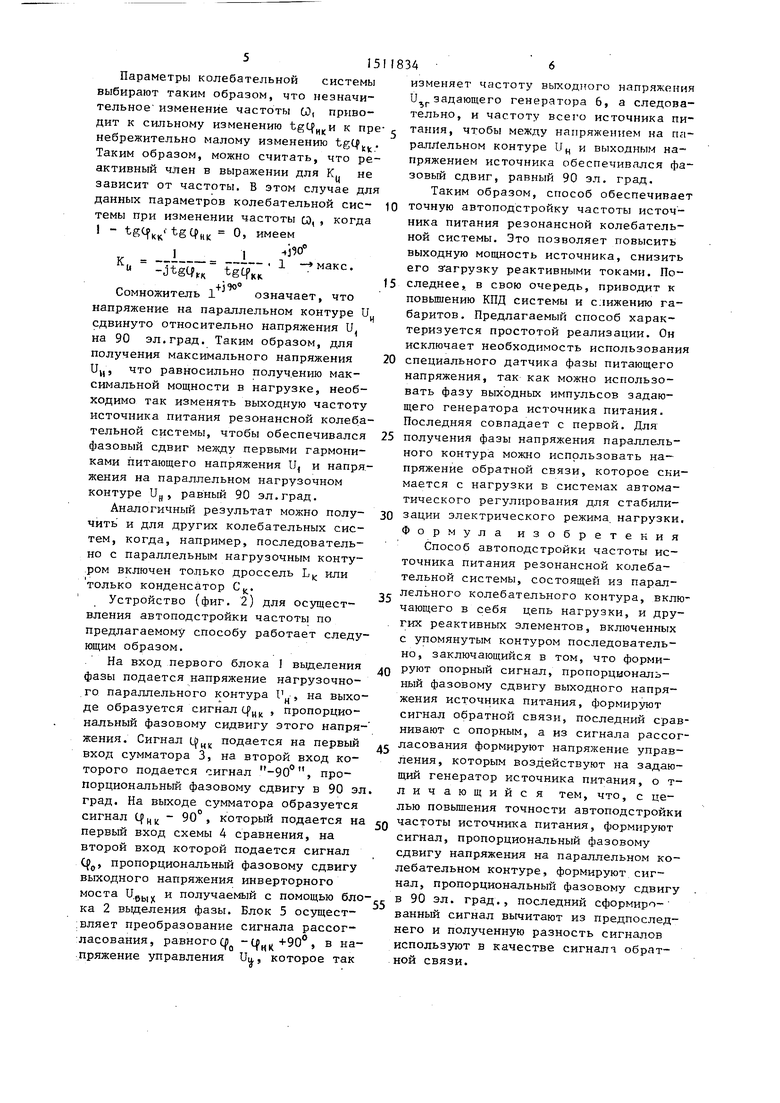
Изобретение относится к электротехнике и может быть использовано в устройствах электропитания током повышенной частоты. Цель - повышение точности автоподстройки частоты источника питания. Устройство, реализующее способ автоподстройки частоты, состоит из блока 1 выделения фазы напряжения нагрузочного параллельного контура, блока 2 выделения фазы выходного напряжения источника питания. Сумматор 3 подсоединен к выходу блока 1. Схема сравнения 4 входами связана соответственно с выходом блока 2 и сумматора 3, а выход подключен к входу усилителя-преобразователя 5 сигнала рассогласования, выход которого связан с входом управляемого задающего генератора 6. Повышение точности автоподстройки частоты повышает мощность источника питания, снижает его загрузку реактивными токами и, соответственно, улучшает КПД и массо-габаритные показатели. 2 ил.
Фиг.2
Изобретение относится к электротехнике, в частности к способам автоподстройки частоты источника питания резонансной колебательной системы, и может быть использовано в устройствах электропитания током повышеной частоты.
Цель изобретения - повышение точности автоподстройки частоты источ- ника питания.
На фиг. 1 приведена схема источника питания, в котором используется предлагаемый способ автоподстройки частоты; на фиг. 2 - функциональная схема устройства для осуществления предлагаемого способа.
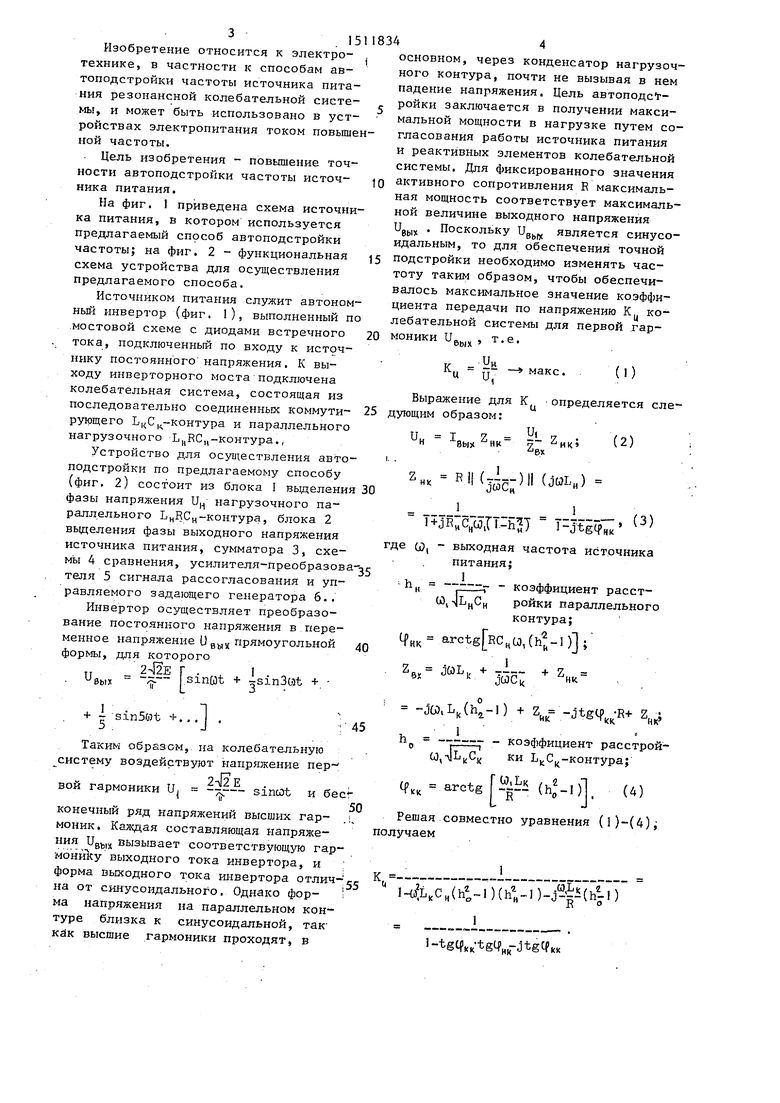
Источником питания служит автоном ньш инвертор (фиг. 1), выполненный п мостовой схеме с диодами встречного тока, подключенный по входу к источнику постоянного напряжения. К вы- ходу шшерторного моста подключена колебательная система, состоящая из последовательно соединенных коммути- рующего ЬцС|,-контура и параллельного нагрузочного Ь ВС„-контура.,
Устройство для осуществления автоподстройки по предлагаемому способу (фиг. 2) состоит из блока I вьщелени фазы напряжения U, нагрузочного параллельного Lj,RC,-контура, блока 2 вьщеления фазы выходного напряжения источника питания, сумматора 3, схе- мь1 4 сравнения, усилителя-преобразов теля 5 сигнала рассогласования и управляемого задающего генератора б. .
Инвертор осуществляет преобразование постоянного напряжения в переменное напряжение и ву к прямоугольной формы, для которого
242Е Г . .., . 1
и
0ЫХ
2-12Е Г . , , IsinUt
+ -sin3cot
+ - sln505t
.... .
Таким образом,, на колебательную
систему воздействуют напряжение пер- Г
вой гармоники U, sincot и 6ecf
50
конечный ряд напряжений высших гар- . i,
МОНИК. Каждая составляющая напряжения Ugbiji вызывает соответствующь Ю гар- монику выходного тока инвертора, и форма выходного тока инвертора отлич- гс на от синусоидального. Однако фор- ма напряжения на параллельном контуре близка к синусоидальной, так- как высшие гармоники проходят, в
JQ
5
20 моники U К 25
основном, через конденсатор нагрузочного контура, почти не вызывая в нем падение напряжения. Цель автоподсТ- ройки заключается в получении максимальной мощности в нагрузке путем согласования работы источника питания и реактивных элементов колебательной системы. Для фиксированного значения активного сопротивления R максимальная мощность соответствует максимальной величине выходного напряжения Ugy . Поскольку Ug является синусоидальным, то для обеспечения точной подстройки необходимо изменять частоту таким образом, чтобы обеспечивалось максимальное значение коэффициента передачи по напряжению К колебательной системы для первой гарбых
т.е.
УИ
и.
макс.
(1)
ики U К
Выражение для К определяется слеUК
образом: I
8ЫХ
ик
Z
у НК бК
(2)
1
.R,|(i.)l|(j«Lj
.Г Т 3tiq-K,
(3)
где (j)| - выходная частота источника питания;
- - коэффициент расст- 03, ройки параллельного контура;
h,,
1|)„ arctg RC U,(h,-I);
Решая совместно уравнения (l)-(4)j получаем
К.
1
()(ь
.,).j«.h(hll)
i-tgCf.K-tgq--jtgCf,,
515
Параметры колебательной системы выбирают таким образом, что незначительное изменение частоты Cx)| приводит к сильному изменению к пре небрежительно малому изменению tgCfj, Таким образом, можно считать, что реактивный член в выражении для К не зависит от частоты. В этом случае для данных параметров колебательной системы при изменении частоты Q, , когда I - tgtfjj. tgq О, имеем
1 1
макс.
и ijtgtf,, fgcf;,
Сомножитель 1 означает, что напряжение на параллельном контуре и„ сдвинуто относительно напряжения U на 90 эл.град. Таким образом, для получения максимального напряжения и„, что равносильно получению максимальной мощности в нагрузке, необходимо так изменять выходную частоту источника питания резонансной колебательной системы, чтобы обеспечивался фазовый сдвиг между первыми гармониками питающего напряжения U, и напряжения на параллельном нагрузочном контуре Uy, равный 90 эл.град.
Аналогичный результат можно получить и для других колебательных систем, когда, например, последовательно с параллельным нагрузочным контуром включен только дроссель L. или только конденсатор С.
Устройство (фиг. 2) для осуществления автоподстройки частоты по предлагаемому способу работает следующим образом.
На вход первого блока I выделения фазы подается напряжение нагрузочного параллельного контура U, на выходе образуется сигнал tfц 1 , пропорциональный фазовому сидвигу этого напряжения. Сигнал подается на первый вход сумматора 3, на второй вход которого подается сигнал -90 , пропорциональный фазовому сдвигу в 90 эл град. На выходе сумматора образуется сигнал 90°, который подается на первый вход схемы 4 сравнения, на второй вход которой подается сигнал Ср, пропорциональный фазовому сдвигу выходного напряжения инверторного моста U. j( и получаемый с помощью блока 2 выделения фазы. Блок 5 осущест- :вляет преобразование сигнала рассог- :ласования, равного qi Ц((+90° , в напряжение управления UN, , которое так
0
5
0
18346
изменяет частоту выходного напряжения и задающего генератора 6, а следовательно, и частоту Bcei o источника пиг тания, чтобы между напряжением на параллельном контуре и и выходным напряжением источника обеспечивался фазовый сдвиг, равный 90 эл. град.
Таким образом, способ обеспечивает точную автоподстройку частоты источника питания резонансной колебательной системы. Это позволяет повысить выходную мощность источника, снизить его з агрузку реактивными токами. Последнее, в свою очередь, приводит к повышению КПД системы и снижению габаритов. Предлагаемый способ характеризуется простотой реализации. Он исключает необходимость использования специального датчика фазы питающего напряжения, так как можно использовать фазу выходных импульсов задающего генератора источника питания. Последняя совпадает с первой. Для
5 получения фазы напряжения параллельного контура можно использовать напряжение обратной связи, которое снимается с нагрузки в системах автоматического регулирования для стабили0 зации электрического режима, нагрузки. Формула изобретения Способ автоподстройки частоты источника питания резонансной колебательной системы, состоящей из парал,- лельного колебательного контура, включающего в себя цепь нагрузки, и дру- , гих реактивных элементов, включенных с упомянутым контуром последовательно, заключающийся в том, что формируют опорный сигнал, пропорциональный фазовому сдвигу выходного напряжения источника питания, формируют сигнал обратной связи, последний сравнивают с опорным, а из сигнала рассогдс ласования формируют напряжение управления, которым воздействуют на задающий генератор источника питания, о т- личающийся тем, что, с целью повьшения точности автоподстройки частоты источника питания, формируют сигнал, пропорциональный фазовому сдвигу напряжения на параллельном колебательном контуре, формируют сигнал, пропорциональный фазовому сдвигу в 90 эл. град., последний сформированный сигнал вычитают из предпоследнего и полученную разность сигналов используют в качестве сигналя обратной связи.
0
50
5
0Фие. I
| Способ автоподстройки частоты источ-НиКА пиТАНия РЕзОНАНСНОй КОлЕбАТЕль-НОй СиСТЕМы | 1977 |
|
SU817931A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Келлер O.K., Кратыш Г.С., Дроздец- кий 10.Н | |||
| Автоматическая подстройка частоты в ультразвуковых генераторах | |||
| Промышленное применение токов высокой частоты/Сб | |||
| науч | |||
| трудов | |||
| Л.: ВНИИ ТВЧ, 1973, № 13, с | |||
| Приспособление для подачи воды в паровой котел | 1920 |
|
SU229A1 |
