Изобретение относится к способам регистрации работы подвижной системы различпых электромагнитных механизмов, являющихся приводами клапанов, заслонок, сервомеханизмов и т.До, которые находят широкое применение в-различных отраслях промышленности.
Цель изобретения - упрощение, по- вьшенне точности и достоверности контроля за счет воздействия на под - вижную систему электромагнитного аппарата магнитным полем переменного направления автоколебательного контура, включающего в себя обмотку электромагнитного аппарата.
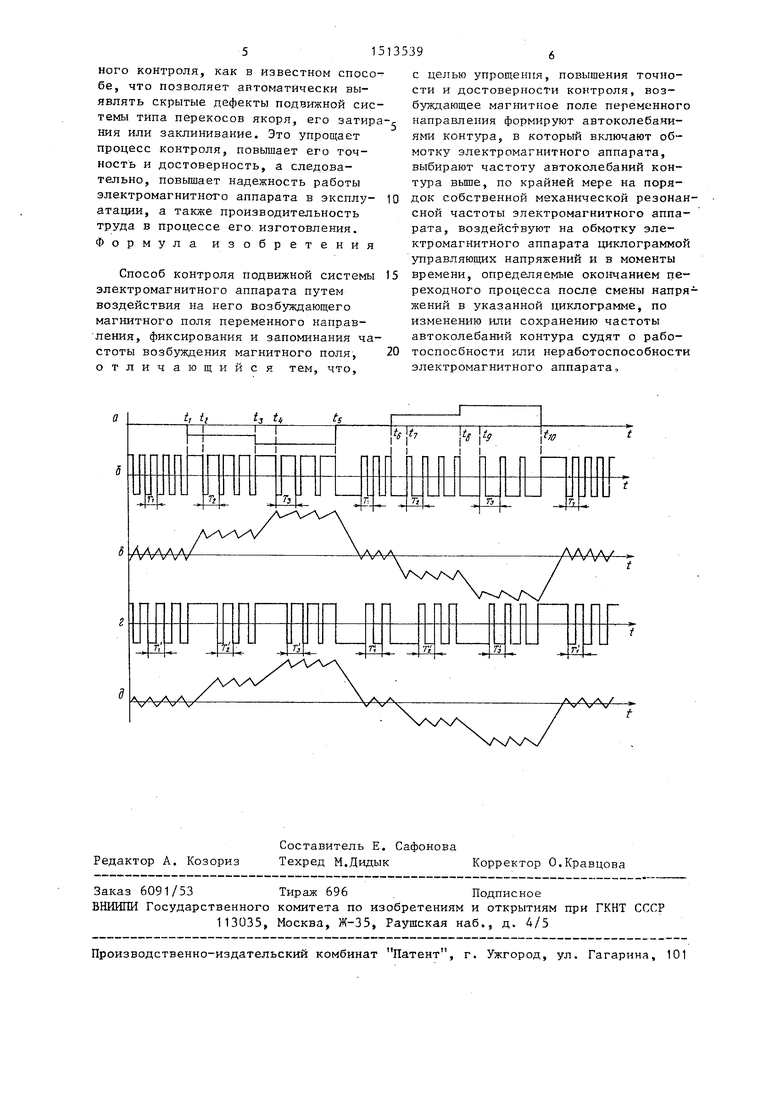
На чертеже показаны временные диаграммы, поясняющие характер автоколебаний в при отсутствии и подаче на его вход циклограммы управляющих напряжений в процессе контроля подвижной системы электромагнитного аппарата по предлагаемому способу, а именно на диаграмме а показана циклограмма изменения управляющих напряжений, подаваемых на обмотку электромагнитного аппарата, на диаграмме б - характер изменения напряжения, на диаграмме в - характер изменения тока, протекающего через обмотку электромагнитного аппаел
Од СП
Од
ф
рата при нормальгшм функтщонирова- нии подвижной системы,, а на диаграмме г, д - характер изменения напряжения и т.ока при заклинивании подвижной системы контролируемого электромагнитного аппарата.
Способ основан на известном положении о том, что индуктивность катушки электромагнитного аппарата при прочих неизменных величина х определяется магнитным сопротивлением участка между подвижной системой электромагнитного аппарата и его сердечником. При движении подвижной системы электромагнита к сердечнику изменяется магнитное сопротивление этого з астка и индуктивность катушки (она возрастает), что ведет к изменению частоты автоколебаний контура, включающего в себя обмотку электромагнитного аппарата, а в случае заклинивания подвижной системы изменение индуктивности катушки электромагнитного аппарата не происходит и частота автоколебаний остается неизменной, а следовательно, нет изменения частоты автоколебаний,
Сущность способа контроля подвижной системы электромагнитного аппарата заключается в следующем с,
Обмотку электромагнитного апг ара- та включают в автоколебательный контур, частоту автоколебаний .которого (диаграмма б, интервал времени до точки t) выбирают по крайней мера выше на порядок собственной механической резонансной частоты электромагнитного аппарата с периодом 1 (диаграмма б)„ При этом ток в обмотк электромагнитного аппарата изменяется с частотой автоколебаний кон тура (диаграмма в, интервал времени до точки t ). Изменение тока в обмотке создает магнитное поле под действием которого возбуждается подвижная система электромагнитного аппарата с частотой автоколебаний контура Фиксируют и запоминают частоту автоколебаний контура с периодом Т (диаграмма б) и подают на вход контура циклограмму последовательности постоянных управляющих напряжений одной полярности (диаграмма а интервал времени между точками t - tг), подвижная система электромагнит начинает двчглться к сердечнику и после окончания переходного процес0
5
0
5
0
5
0
5
0
са После очередной смены постоянного напряжения (диаграмма б, моменты времени точки t, t) измеряют частоту автоколебаний контура путем измерения частоты с не)иодами Т, и Т со- ответстверпю. При этом, поскольку при движении подвижной системы электромагнитного аппарата к сердечнику индуктивность катушки электромагнитного аппарата возрастает, частота автоколебаний снижается и при нормальном функционировании подвижной системы должно выполняться условие Т, Т ;;, Т j (диаграмма б) .
По величине изменения частоты автоколебаний по фиксированным точкам движения якоря судят о положении якоря и работе подвижной системы электромагнитного аппарата.
Аналогично осуществляют проверку подвижной системы электромагнитного аппарата при подаче на вход контура циклограммы последовательности постоянных управляющих напряжений другой полярности (диаграмма а, интервал времени между точками ,)o
В случае заклинивания подвижной системы частота автоколебаний сохраняется неизменной с момента пре кращения движения якоря подвижной системы электромагнитного аппарата, изменение частоты автоколебаний не соответствует заданной по фиксированным точкам движения якоря подвижней системы электромагнитного ап- гарата в процессе контроля.
Технический эффект от использования предложенного способа контроля подвижной системы электромагнитного аппарата заключается в том, что по сравнению с известным способом контроля, он обеспечивает не только контроль работы подвижной системы . электромагнитного аппарата путем воз- бунодения якоря магнитным полем, но и позволяет воздействовать на подвижную систему электромагнитного аппарата без специального оборудования путем создания магнитного поля авто- ,колебательным контуром, включаюпщм в себя обмотку электромагнитного аппарата. При этом обеспечивается полная автоматизация процесса контроля и исключаются ручные регулировки тягового момента магнитного поля, а сам контроль может осуществляться и после полной сборки электромагнит- зшго аппарата i-r ic визуального контроля, как в известном способе, что позволяет артоматйчески выявлять скрытые дефекты подвижной системы типа перекосов якоря, его затира ния или заклинивание. Это упрощает процесс контроля, повьшает его точность и достоверность, а следовательно, повышает надежность работы электромагнитного аппарата в эксплу- атации, а также производительность труда в процессе его. изготовления. Формула изобретения
Способ контроля подвижной системы электромагнитного аппарата путем воздействия на него возбуждающего магнитного поля переменного направ- ления, фиксирования и запоминания частоты возбуждения магнитного поля, отличающийся тем, что,
с целью упрощения, повышения точ1го- сти и достоверности контроля, возбуждающее магнитное поле переменного направления формируют автоколебаниями , в которьп1 включают обмотку электромагнитного аппарата, выбирают частоту автоколебаний контура выше, по крайней мере на порядок собственной механической резонансной частоты электромагнитного аппарата, воздействуют на обмотку электромагнитного аппарата циклограммой управляющих напряжений и в моменты времени, определяемые окончанием переходного процесса после смены напряжений в указанной циклограмме, по изменению или сохранению частоты автоколебаний контура судят о рабо- тоспосбности или неработоспособности электромагнитного аппарата.
Изобретение относится к способам регистрации подвижной системы различных электромагнитных механизмов, являющихся приводами клапанов, заслонов, сервомеханизмов и т.д., которые находят широкое применение в различных отраслях промышленности. Цель изобретения - упрощение, повышение точности и достоверности контроля. Для контроля подвижной системы электромагнитного аппарата воздействуют на его подвижную систему магнитным полем переменного направления, которое формируют автоколебаниями контура, включающего в себя обмотку электромагнитного аппарата, с частотой автоколебаний контура выше, по крайней мере на порядок, собственной механической резонансной частоты электромагнитного аппарата. Воздействуют на обмотку электромагнитного аппарата циклограммой управляющих напряжений и в моменты времени, определяемые окончанием переходного процесса после смены напряжений в циклограмме, по изменению или сохранению частоты автоколебаний контура судят о работоспособности или неработоспособности электромагнитного аппарата. 1 ил.
| Способ контроля магнитной системы электромагнитного аппарата | 1984 |
|
SU1184024A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля параметров герконов | 1985 |
|
SU1295463A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
