Изобретение относится к устройствам регистрации качества работы подвижной системы различных электрома 25 нитных механизмов, являющихся привоами клапанов, заслонок, сервомеханизмов и т.д., которые находят широкое применение в различных отраслях промышленности.30
Цель изобретения - повышение точности и достоверности контроля за счёт возбуждения колебаний якоря подвижной системы электромагнитного аппарата магнитным полем автоколебатель- 5 ного контура, включающего в себя обмотку электромагнитного аппарата.
На фиг. 1 приведена функциональная схема устройства; на фиг. 2 и 3 диаграммы, поясняющие работу устройства; 40 на фиг. - алгоритмы управления и анализа результатов контроля.
Устройство содержит дифференциальный усилитель 1, выходом соединенный с управляющими входами ключа 2 и дру- 45 гого ключа 3, входы которых соединены соответственно с выходом источника k питания и другого источника 5 питания с напряжением Е, а выходы ключей 2 и 3 объединены и соединены с первым выводом для подключения обмотки 6 электромагнитного аппарата, второй вывод для подключения электромагнитного аппарата через первый резистор 7 соединен с общей шиной и через второй резистор В с инвертирующим входом (U- входом) дифференциального усилителя 1, неинвертирующий вход (Н-вход) которого через третий резистор 9 соединен с об50
0
5
0
5
0
Щей шиной и через шестой резистор.10 с выходом усилителя 1. Вход блока 11 рассогласования соединен с первым выводом для подключения обмотки 6 электромагнитного аппарата, а выход через четвертый резистор 12 - с входом формирователя 13 импульсов, выход которого соединен с первым входом элемента И 14, второй вход которого соединен с первым входом .15 устройства, а выход элемента И И - с входом преобразователя выходного сигнала, выполненного в виде счетчика 16 импульсов и регистра 17, выходом соединенного с выходом преобразователя выходного сигнала и выходом 18 устройства. Третий вход 19 устройства через пятый резистор 20 соединен с U-входом усилителя 1. Второй вход 2t устройства соединен с входом установки в нулевое состояние преобразователя выходногр сигнала, состоящего из счетчика 16 и регистра 17.
Обмотка 6 электромагнитного аппарата имеет комплексное сопротивление, которое состоит из резистора 22 и катушки 23 индуктивности. Блок 11 согласования состоит из резисторов 2k и 25. Цифроаналоговый преобразователь 26 входного сигнала подсоединен между третьим входом 19 и пятым резистором 20.
Режим работы ключей 2 и 3 выбран так, что ключ 2 замыкается при положительном напряжении на его управляющем входе, а ключ 3 замыкается при
отрицательном напряжении на его управляющем входе. .
Режим работы дифференциального усилителя выбран так, что он имеет гистерезисную характеристику за счет eйcтвия цепи положительной обратной связи, образованной резисторами 9 и 10. Резистор 7 в устройстве выполняет функцию датчика обратной связи, выход которого через резистор 8 соединен с и-входом усилителя 1.
Контроль качества работы подвижной системы электромагнитного аппарата основан на известном положении о том, что индуктивность обмотки электромагнитного аппарата при прочих неизменных величинах определяется магнитным сопротивлением зазора в магнитопроводе электромагнита контролируемого аппарата. При отсутствии тока в обмотке контролируемого аппарата якорь его подвижной системы удерживается в нейтральном положении, а индуктивность обмотки электромагнитного аппарата в этом случае минимальна. При движении якоря электромагнита зазор в магнитопроводе электромагнита уменьшается, а индуктивность обмотки возрастает, и при повороте якоря на максимальный угол зазор в магнитопроводе катушки электромагнита полностью перекрывается, а индуктивность становится максимальной.
С учетом указанного обстоятельства обмотка 6 контролируемого аппарата включается в автоколебательный контур (фиг.1), частота автоколебаний которого выбирается выше собственной механической резонансной частоты контролируемого электромагнитного аппарата, а рабочий диапазон токов устройства, выбирается значительно мень- ше токов насыщения для исключения изменения частоты автоколебаний контура из-за попадания на нелинейную зону экспоненциального переходного процесса тока нагрузки (выбирается начальный линейный участок экспоненты).
Устройство работает следующим образом.
Перед началом работы схемы на вход
10
При включении питания на выходе усилителя 1 благодаря действию пол жительной обратной сзязи скачком устанавливается либо положительное напряжение U, либо отрицательное напряжение Uu (знак напряжения опр деляется знаком смещения нулевого уровня усилителя). При этом на Н-в де усилителя 1 устанавливается соо ветственно либо
15
20
25
30
35
40
45
50
и-
и
R,
S
R
10
либо и и
.RI.
1Ц
R
10
где Rg, R
10
выходе усилителя 1 напряжение U. Под де
КЛЮ1
- резисторы цепи полож тельной обратной свя
Например, на установилось
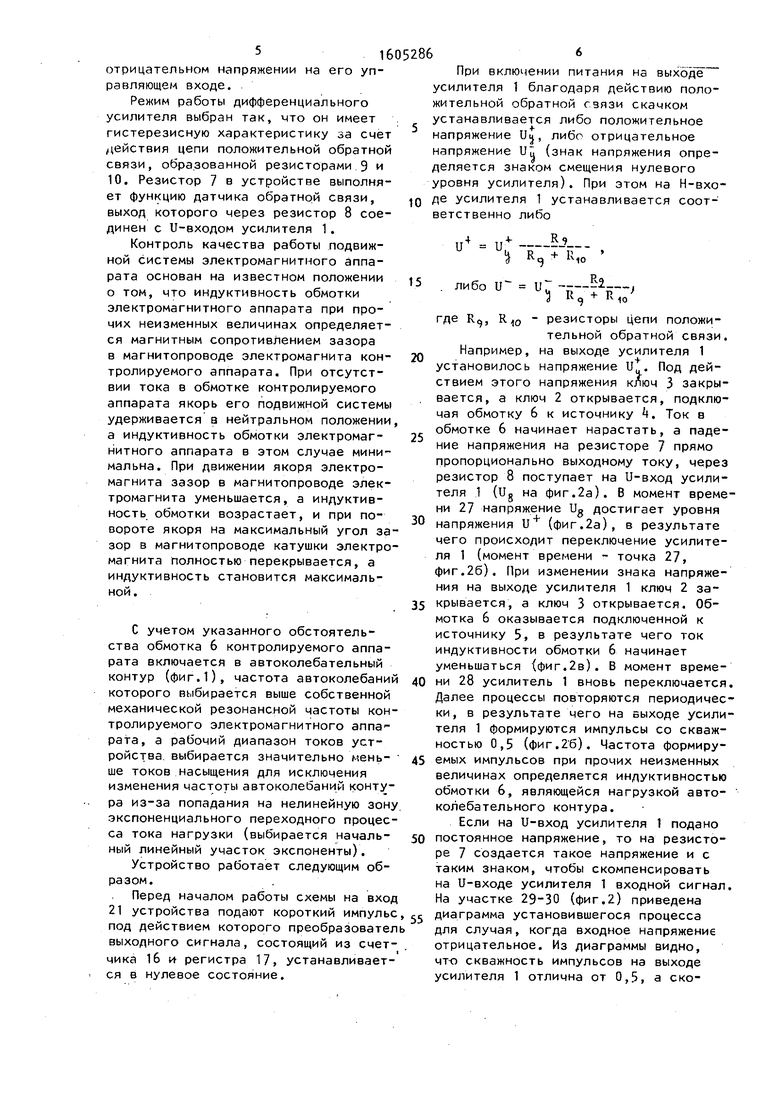
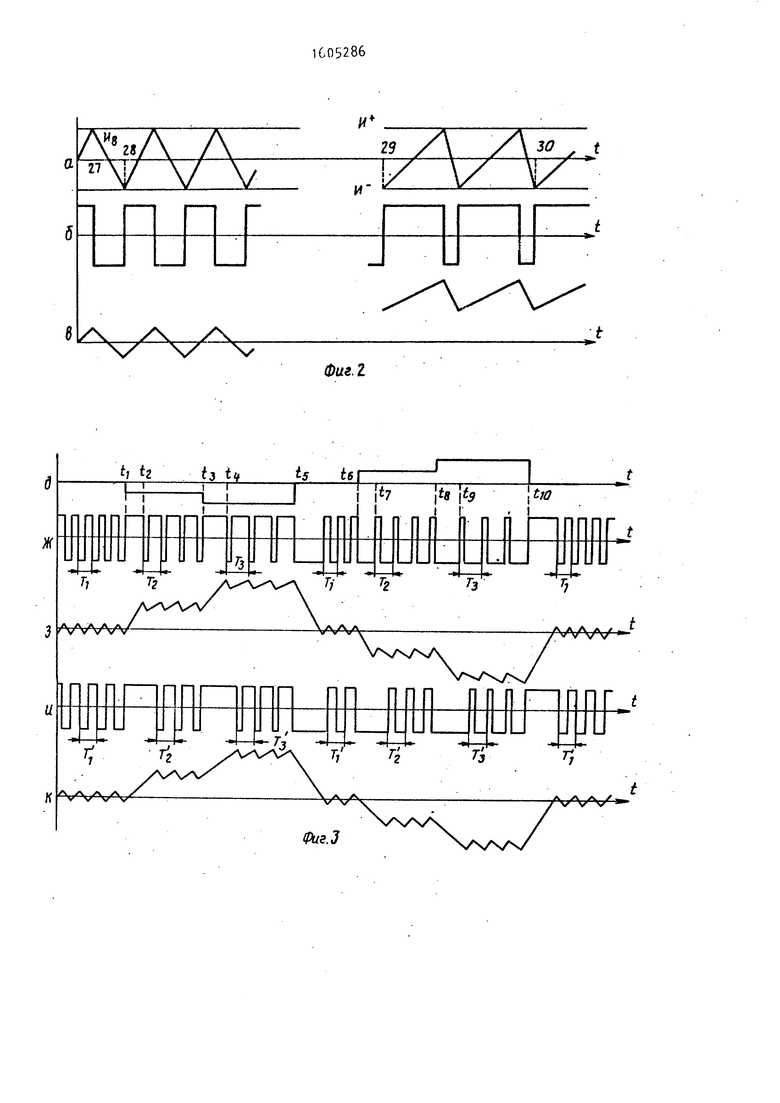
ствием этого напряжения кАюч 3 зак вается, а ключ 2 открывается, подк чая обмотку 6 к источнику 4. Ток в обмотке 6 начинает нарастать, а па ние напряжения на резисторе 7 прям пропорционально выходному току, че резистор 8 поступает на U-вход уси теля 1 (Ug на фиг.2а). В момент вр ни 27 напряжение Ug достигает уров напряжения U (фиг.2а), в результа чего происходит переключение усили ля 1 (момент времени - точка 27, фиг.26). При изменении знака напря ния на выходе усилителя 1 ключ 2 з крывается, а ключ 3 открывается. О мотка 6 оказывается подключенной к источнику 5, в результате чего ток индуктивности обмотки 6 начинает уменьшаться (фиг.2в). В момент вре ни 28 усилитель 1 вновь переключае Далее процессы повторяются периоди ки, в результате чего на выходе ус теля 1 формируются импульсы со скв ностью 0,5 (фиг.2 б). Частота форми емых импульсов при прочих неизменн величинах определяется индуктивнос обмотки 6, являющейся нагрузкой ав колебательного контура.
Если на и-вход усилителя 1 пода постоянное напряжение, то на резис ре 7 создается такое напряжение и таким знаком, чтобы скомпенсироват на и-входе усилителя 1 входной сиг На участке 29-30 (фиг.2) приведена
21 устройства подают короткий импульс, диаграмма установившегося процесса
под действием которого преобразователь выходного сигнала, состоящий из счетчика 16 и регистра 17, устанавливает- ся в нулевое состояние.
для случая, когда входное напряжен отрицательное. Из диаграммы видно, чт-о скважность импульсов на выходе усилителя 1 отлична от 0,5, а ско
При включении питания на выходе усилителя 1 благодаря действию положительной обратной сзязи скачком устанавливается либо положительное напряжение U, либо отрицательное напряжение Uu (знак напряжения определяется знаком смещения нулевого уровня усилителя). При этом на Н-вхо- де усилителя 1 устанавливается соответственно либо
и
R,
S
R
10
либо и и
.RI.
1Ц
R
10
5
0
5
0
5
0
где Rg, R
10
выходе усилителя 1 напряжение U. Под дейКЛЮ1
- резисторы цепи положительной обратной связи.
Например, на установилось
ствием этого напряжения кАюч 3 закрывается, а ключ 2 открывается, подключая обмотку 6 к источнику 4. Ток в обмотке 6 начинает нарастать, а падение напряжения на резисторе 7 прямо пропорционально выходному току, через резистор 8 поступает на U-вход усилителя 1 (Ug на фиг.2а). В момент времени 27 напряжение Ug достигает уровня напряжения U (фиг.2а), в результате чего происходит переключение усилителя 1 (момент времени - точка 27, фиг.26). При изменении знака напряжения на выходе усилителя 1 ключ 2 закрывается, а ключ 3 открывается. Обмотка 6 оказывается подключенной к источнику 5, в результате чего ток индуктивности обмотки 6 начинает уменьшаться (фиг.2в). В момент времени 28 усилитель 1 вновь переключается. Далее процессы повторяются периодически, в результате чего на выходе усилителя 1 формируются импульсы со скважностью 0,5 (фиг.2 б). Частота формируемых импульсов при прочих неизменных величинах определяется индуктивностью обмотки 6, являющейся нагрузкой автоколебательного контура.
Если на и-вход усилителя 1 подано постоянное напряжение, то на резисторе 7 создается такое напряжение и с таким знаком, чтобы скомпенсировать на и-входе усилителя 1 входной сигнал. На участке 29-30 (фиг.2) приведена
диаграмма установившегося процесса
для случая, когда входное напряжение отрицательное. Из диаграммы видно, чт-о скважность импульсов на выходе усилителя 1 отлична от 0,5, а скорость изменения тока в нагрузке при нарастании и спаде оказывается различными .
Действительно, для изображенного случая при замыкании ключа 2 к катушке 23 индуктивности приложено напряжение (E-U-f./ так как напряжение Е источника 4 и напряжения U-, включены встречно. 1ри замыкании ключа 3 к катушке 23 индуктивности приложено напряжение (E+U), так как напряжение Е источника 5 и напряжение и/ включены согласно. Так как (E-U-) 1 (E+U то скорость нарастания оказывается ниже скорости спада тока в нагрузке. Это различие тем больше, чем больше входное напряжение.
Таким образом, каждому знаку входного сигнала соответствует определен- 2о частоты ЭВМ выдает на вход 21 устройства сигнал обнуления, под действием которого устанавливаются в нулевое состояние счетчик 1б и регистр 17.. На следующем такте ЭВМ выдает команду
25 Код-напряжение из ячейки В; на вход 19 устройства, который поступает на цифроаналоговый преобразователь 26 входного сигнала, с выхода которого сигнал в виде постоянного напряжения
30 (момент времени t, фиг.Зд) поступает через резистор 20 на U-вход усилителя 1. Как описывалось ранее, ток в обмотке 6 начинает нарастать, якорь электромагнита начинает двигаться в
2J сторону уменьшения зазора в магнито- проводе, а индуктивность катушки электромагнита возрастает, следовательно снижается частота автоколебаний, период которой становится Т. По окон40 чании переходного процесса (выдержка времени задается из ЭВМ) с момента
ная скважность импульсов на выходе усилителя 1 (фиг.26), а постоянная составляющая тока нагрузки линейно зависит от уровня входного сигнала на и-входе усилителя 1. Частота ши- ротно-импульсного сигнала, как и при нулевом сигнале на входе 19 устройства, определяется при прочих неизменных величинах индуктивностью нагрузки.
Рабочий диапазон токов устройства выбирается значительно меньше токов насыщения нагрузки, а частота автоколебаний контура значительно выше собственной механической резонансной частоты контролируемого аппарата.
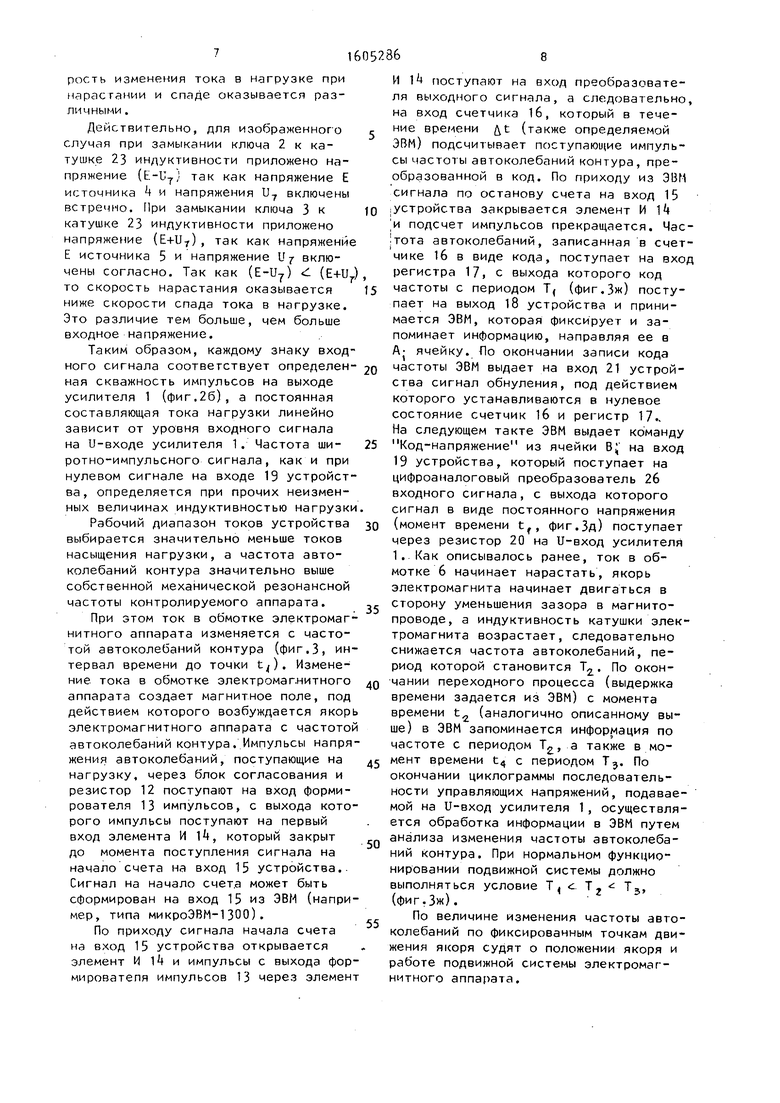
При этом ток в обмотке электрома - нитного аппарата изменяется с частотой автоколебаний контура (фиг.З, интервал времени до точки t). Изменение тока в обмотке электромагнитного аппарата создает магнитное поле, под действием которого возбуждается якорь электромагнитного аппарата с частотой автоколебаний контура .Импульсы напряжения автоколебаний, поступающие на нагрузку, через блок согласования и резистор 12 поступают на вход формирователя 13 импульсов, с выхода которого импульсы поступают на первый вход элемента И И, который закрыт до момента поступления сигнала на начало счета на вход 13 устройства.. Сигнал на начало счет.а может быть сформирован на вход 13 из ЭВМ (например, типа микроЭВМ-1ЗОО).
По приходу сигнала начала счета на вход 13 устройства открывается элемент И и импульсы с выхода формирователя импульсов 13 через элемент
времени t (аналогично описанному выше) в ЭВМ запоминается информация по частоте с периодом Tg, а также в мо- 45 мент времени t4 с периодом Tj. По окончании циклограммы последовательности управляющих напряжений, подаваемой на и-вход усилителя 1, осуществляется обработка информации в ЭВМ путем анализа изменения частоты автоколебаний Контура. При нормальном функционировании подвижной системы должно выполняться условие Т , :. Т, : Т, (фиг.Зж).
По величине изменения частоты автоколебаний по фиксированным точкам движения якоря судят о положении якоря и работе подвижной системы электромагнитного аппарата.
50
16052868
И поступают на вход преобразователя выходного сигнала, а следовательно, на вход счетчика 1б, который в течение времени (также определяемой ЭВМ) подсчитывает поступаюи1ие импульсы частоты автоколебаний контура, преобразованной в код. По приходу из ЭВМ сигнала по останову счета на вход 15 |Устройства закрывается элемент И k и подсчет импульсов прекращается. Час- ;Тота автоколебаний, записанная в счетчике 16 в виде кода, поступает на вход регистра 17, с выхода которого код частоты с периодом Т (фиг.Зж) поступает на выход 18 устройства и принимается ЭВМ, которая фиксирует и запоминает информацию, направляя ее в А; ячейку. Ло окончании записи кода
времени t (аналогично описанному выше) в ЭВМ запоминается информация по частоте с периодом Tg, а также в мо- 5 мент времени t4 с периодом Tj. По окончании циклограммы последовательности управляющих напряжений, подаваемой на и-вход усилителя 1, осуществляется обработка информации в ЭВМ путем анализа изменения частоты автоколебаний Контура. При нормальном функционировании подвижной системы должно выполняться условие Т , :. Т, : Т, (фиг.Зж).
По величине изменения частоты автоколебаний по фиксированным точкам движения якоря судят о положении якоря и работе подвижной системы электромагнитного аппарата.
0
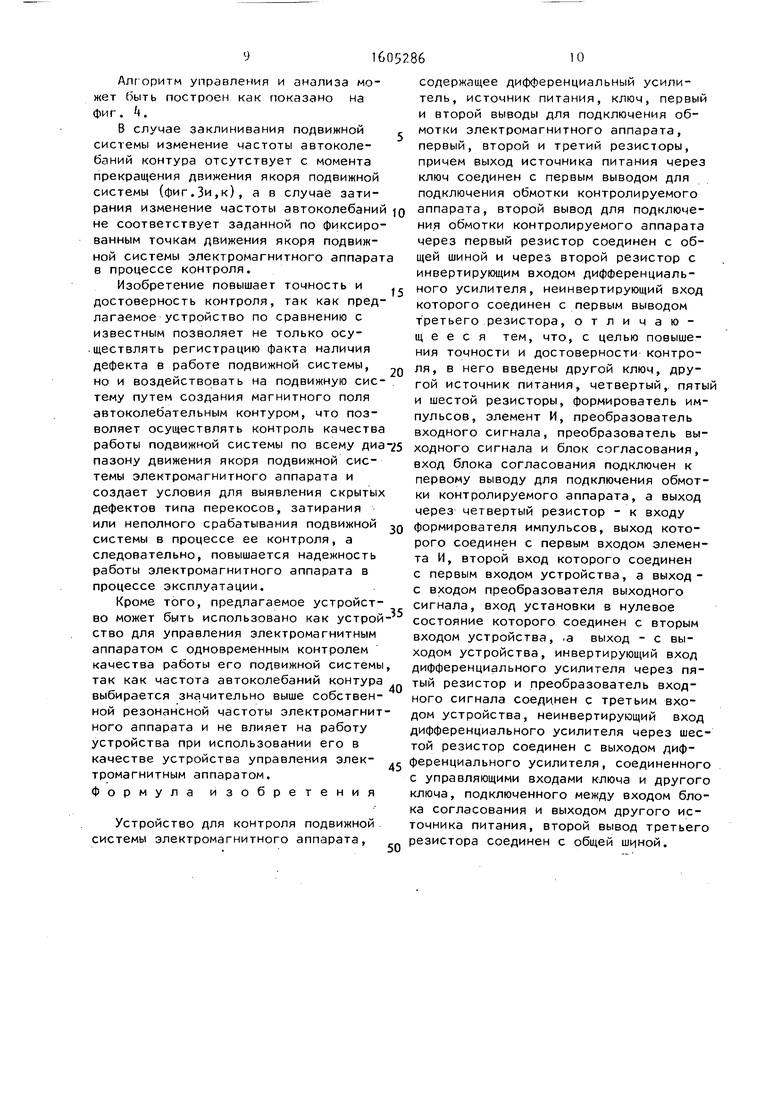
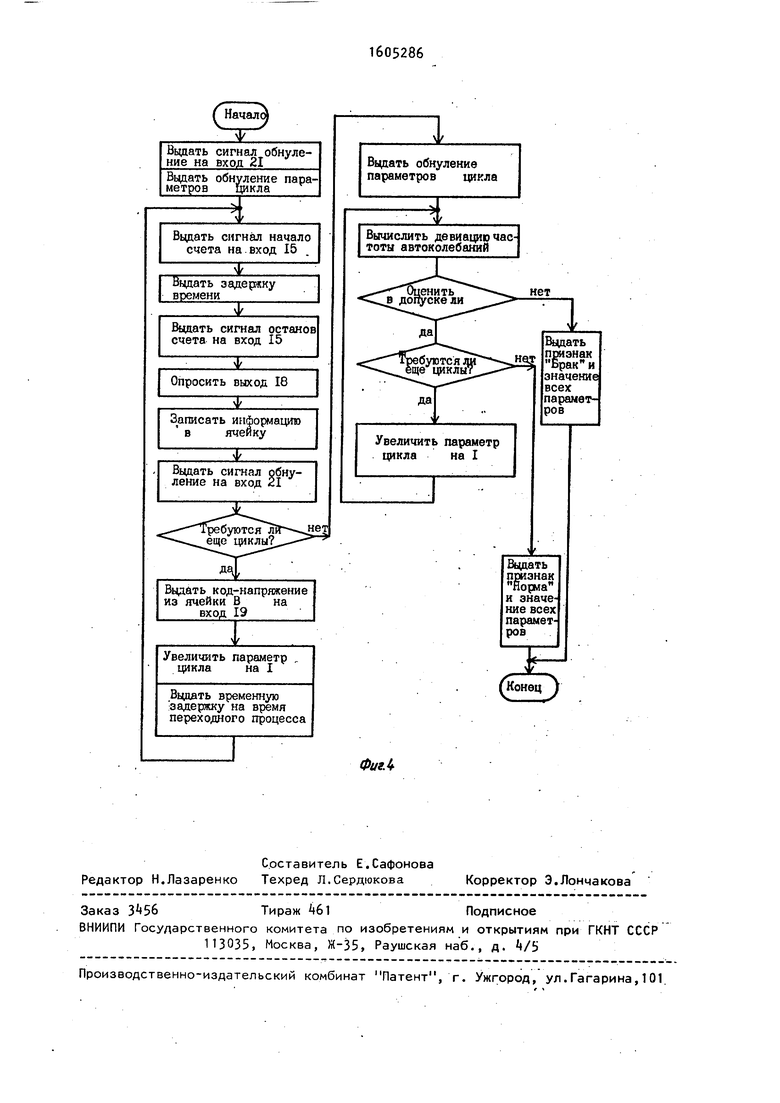
Алгоритм управления и анализа может быть построен как показано на фиг, 4.
В случае заклинивания подвижной системы изменение частоты автоколебаний контура отсутствует с момента прекращения движения якоря подвижной системы (фиг.3и,к), а в случае затирания изменение частоты автоколебаний не соответствует заданной по фиксированным точкам движения якоря подвижной системы электромагнитного аппарат в процессе контроля.
Изобретение повышает точность и достоверность контроля, так как предлагаемое устройство по сравнению с известным позволяет не только осу- ществлять регистрацию факта наличия дефекта в работе подвижной системы, но и воздействовать на подвижную систему путем создания магнитного поля автоколебательным контуром, что позволяет осуществлять контроль качества работы подвижной системы по всему диа пазону движения якоря подвижной системы электромагнитного аппарата и создает условия для выявления скрытых дефектов типа перекосов, затирания или неполного срабатывания подвижной системы в процессе ее контроля, а следовательно, повышается надежность работы электромагнитного аппарата в процессе эксплуатации.
Кроме того, предлагаемое устройство может быть использовано как устройство для управления электромагнитным аппаратом с одновременным контролем качества работы его подвижной системы так как частота автоколебаний контура выбирается значительно выше собственной резонансной частоты электромагнитного аппарата и не влияет на работу устройства при использовании его в качестве устройства управления электромагнитным аппаратом. Формула изобретения
Устройство для контроля подвижной системы электромагнитного аппарата.
15
0
jg
25 Q
0
5
0
содержащее дифференциальный усилитель, источник питания, ключ, первый и второй выводы для подключения обмотки электромагнитного аппарата, первый, второй и третий резисторы, причем выход источника питания через ключ соединен с первым выводом для подключения обмотки контролируемого аппарата, второй вывод для подключения обмотки контролируемого аппарата через первый резистор соединен с общей шиной и через второй резистор с инвертирующим входом дифференциального усилителя, неинвертирующий вход которого соединен с первым выводом третьего резистора, отличающееся тем, что, с целью повышения точности и достоверности контроля, в него введены другой ключ, другой источник питания, четвертый,, пятый и шестой резисторы, формирователь импульсов, элемент И, преобразователь входного сигнала, преобразователь выходного сигнала и блок согласования, вход блока согласования подключен к первому выводу для подключения обмотки контролируемого аппарата, а выход через четвертый резистор - к входу формирователя импульсов, выход которого соединен с первым входом элемента И, второй вход которого соединен с первым входом устройства, а выход- с входом преобразователя выходного сигнала, вход установки в нулевое состояние которого соединен с вторым входом устройства, .а выход - с выходом устройства, инвертирующий вход дифференциального усилителя через пятый резистор и преобразователь входного сигнала соединен с третьим входом устройства, неинвертирующий вход дифференциального усилителя через шестой резистор соединен с выходом дифференциального усилителя, соединенного с управляющими входами ключа и другого ключа, подключенного между входом блока согласования и выходом другого источника питания, второй вывод третьего резистора соединен с общей шиной.
а
27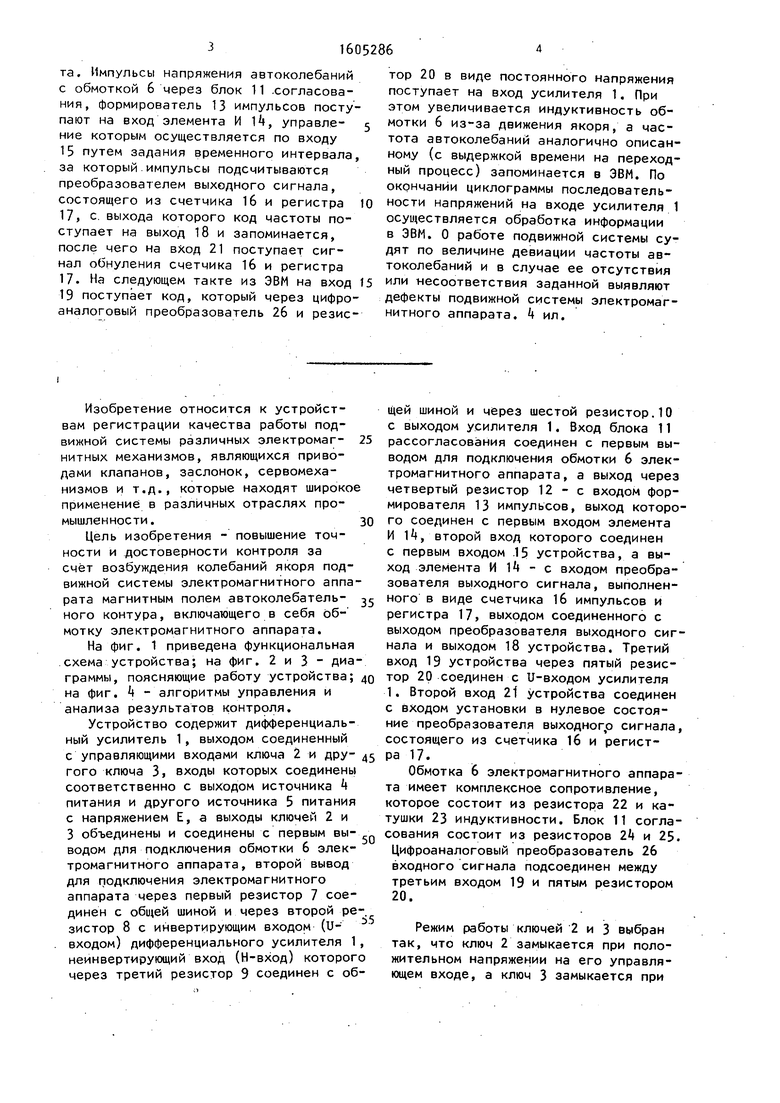
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля подвижной системы электромагнитного аппарата | 1990 |
|
SU1767567A1 |
| Способ контроля подвижной системы электромагнитного аппарата | 1987 |
|
SU1513539A1 |
| Устройство для управления электромагнитом | 1988 |
|
SU1511772A1 |
| СИСТЕМА ЗАЖИГАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2276282C2 |
| УСТРОЙСТВО КОНТРОЛЯ И УПРАВЛЕНИЯ РАСХОДОМ СЕМЯН ПНЕВМАТИЧЕСКОЙ СЕЯЛКОЙ | 1992 |
|
RU2043006C1 |
| Устройство для подбора упругих опор чувствительного элемента | 1988 |
|
SU1516791A1 |
| Многодвигательный электропривод | 1989 |
|
SU1676061A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Преобразователь ток-частота с импульсной обратной связью | 1987 |
|
SU1552377A1 |
| РАДИО-ШАРИКОВЫЙ ПЕРВИЧНЫЙ ПРЕОБРАЗОВАТЕЛЬ РАСХОДА ЖИДКОСТИ | 2018 |
|
RU2685798C1 |
Изобретение относится к устройствам регистрации качества работы подвижной системы различных электромагнитных механизмов, которые находят широкое применение в различных отраслях промышленности. Цель изобретения - повышение точности и достоверности контроля. Для контроля подвижной системы обмотка 6 контролируемого аппарата включает автоколебательный контур, частота автоколебаний которого выбирается значительно выше резонансной частоты электромагнитного аппарата. Иимпульсы напряжения автоколебаний с обмотки 6 через блок 11 согласования, формирователь 13 импульсов поступают на вход элемента И 14, управление которым осуществляется по входу 15 путем задания времененного интервала, за который импульсы подсчитываются преобразователем выходного сигнала, состоящего из счетчика 16 и регистра 17, с выхода которого код частоты поступает на выход 18 и запоминается, после чего на вход 21 поступает сигнал обнуления счетчика 16 и регистра 17. На следующем такте из ЭВМ на вход 19 поступает код, который через цифро-аналоговый преобразователь 26 и резистор 20 в виде постоянного напряжения поступает на вход усилителя 1. При этом увеличивается индуктивность обмотки 6 из-за движения якоря, а частота автоколебаний аналогично описанному (с выдержкой времени на переходный процесс) запоминается в ЭВМ. По окончании циклограммы последовательности напряжений на входе усилителя 1 осуществляется обработка информации в ЭВМ. О работе подвижной системы судят по величине девиации частоты автоколебий и в случае ее отсутствия или несоответствия заданной выявляют дефекты подвижной системы электромагнитного аппарата. 4 ил.
8
Фиг. 2
Вьщать сигнал обнуле- ние на вход 21
Вьщать обнуление параметров цикла
Вьщать сигнал начало счета на вход 15
Вьщать задержку времени
Вьщать сигнал останов счета на вход 15
Опросить выход 18
Записать информацию в ячейку
Вьщать сигнал обнуление на вход 21
нет
Вьщать код-напряжение из ячейки В на
вход 19
Увеличить параметр цикла на I
Вьщдть временную задержку на время переходного процесса
Х
Вьщать обнуление параметров цикла
Вычислить девиацию частоты автоколебаний
нет
Вьщать пшэнак значение всех параметров
Увеличить параметр цикла на I
Вьщать признак Норма и значение всех парамет ров
ГКонец )
| 1971 |
|
SU414646A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для неразрушающего контроля электромагнитного реле постоянного тока | 1981 |
|
SU991527A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
