Изобретение относится к оборудованию ядерных энергетических установок и может быть использовано в механизмах управления ядерных реакторов.
Целью изобретения является повышение надежности активной зоны за счет исключения динамических нагрузок на элементы конструкций активной зоны при аварийном сбросе регулирующего органа.
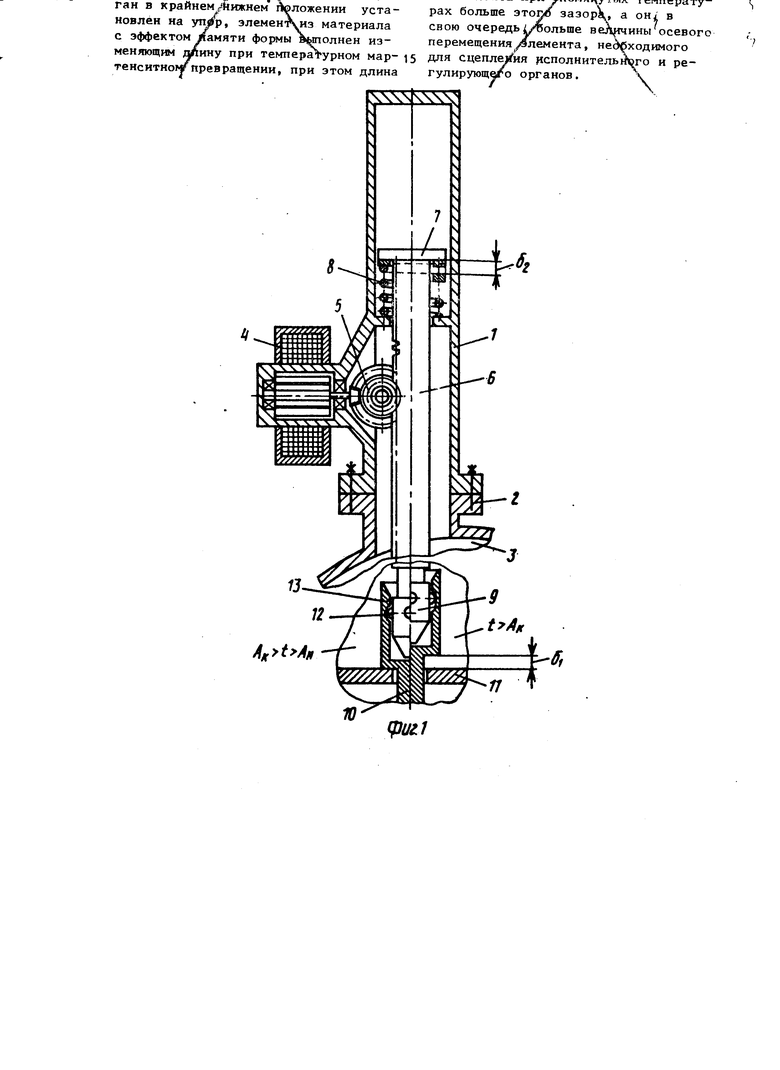
На фиг. 1 изображен предлагаемый механизм, общий вид; на фиг. 2 показан первый вариант захват в расцепленном положении; на фиг. 3 - то же, в сцепленном положении; на фиг. 4 - то же в положении, когда поднят регулирующий орган; на фиг. 5 - второй вариант захвата.
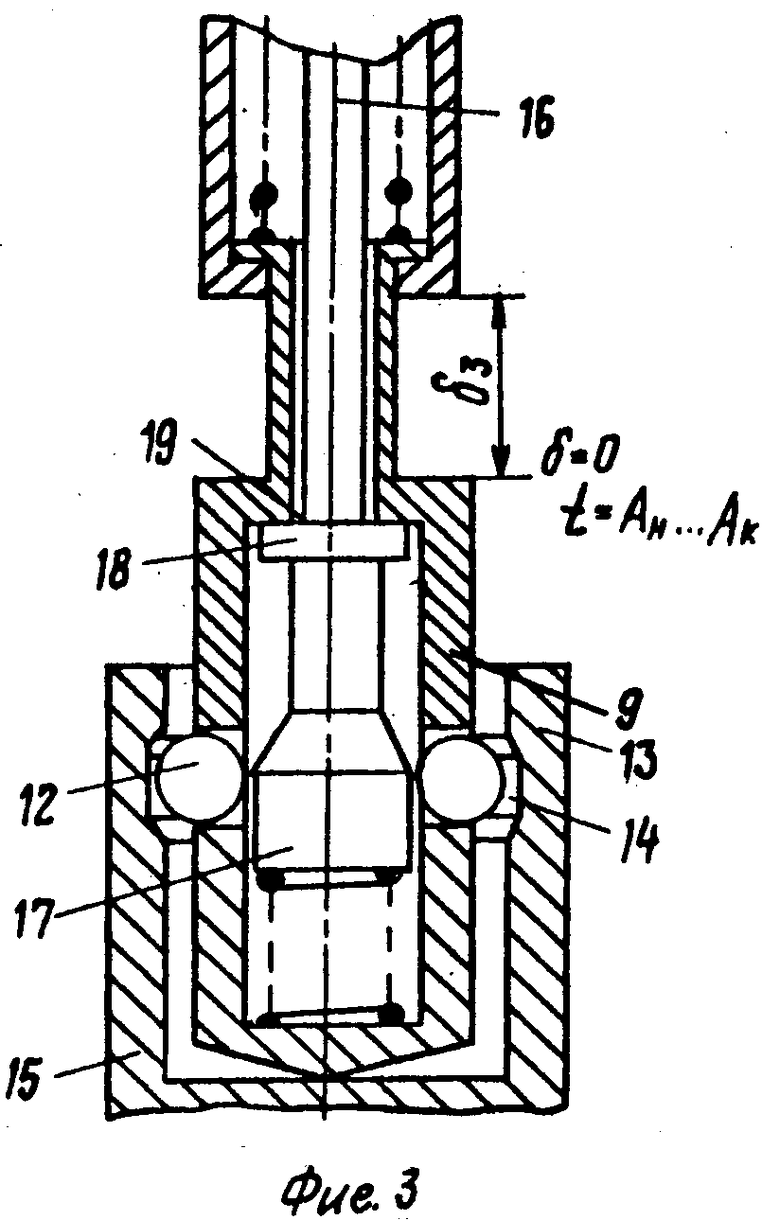
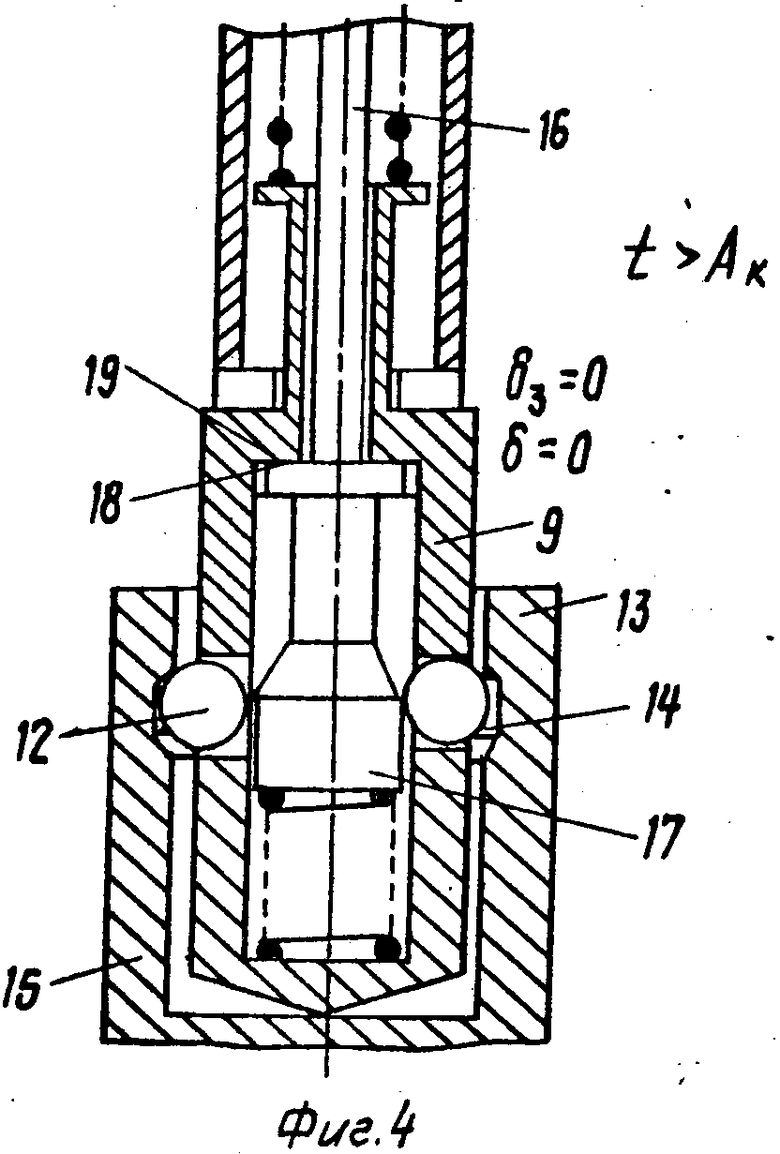
Механизм управления ядерного реактора содержит чехол 1, установленный на крышку 2 ядерного реактора 3, электродвигатель 4, редуктор 5, рейку 6 (исполнительный орган может быть другой, например, якорь, штанга, винт, поршень и т. п. ). Рейка 6 буртом 7 установлена на демпфер 8. Рейка 6 захватом 9 соединена с регулирующим органом 10, который в своем крайнем положении установлен на плиту 11 активной зоны реактора (или на кассету активной зоны). Первый вариант захвата (фиг. 2-4) включает шарики 12 (фиксирующие элементы, могут быть рычаги и т. п. ), взаимодействующие с буртом 13 (диаметральным выступом) и проточкой 14 захватной части 15 регулирующего органа. На рейке закреплен элемент захвата - шток 16, выполненный из материала с эффектом памяти формы, например никелида титана. В нижней части штока 16 установлена утолщенная часть 17, взаимодействующая с шариками 12. На штоке выполнен выступ 18, на захвате - упор 19 (выступ) для выступа 18.
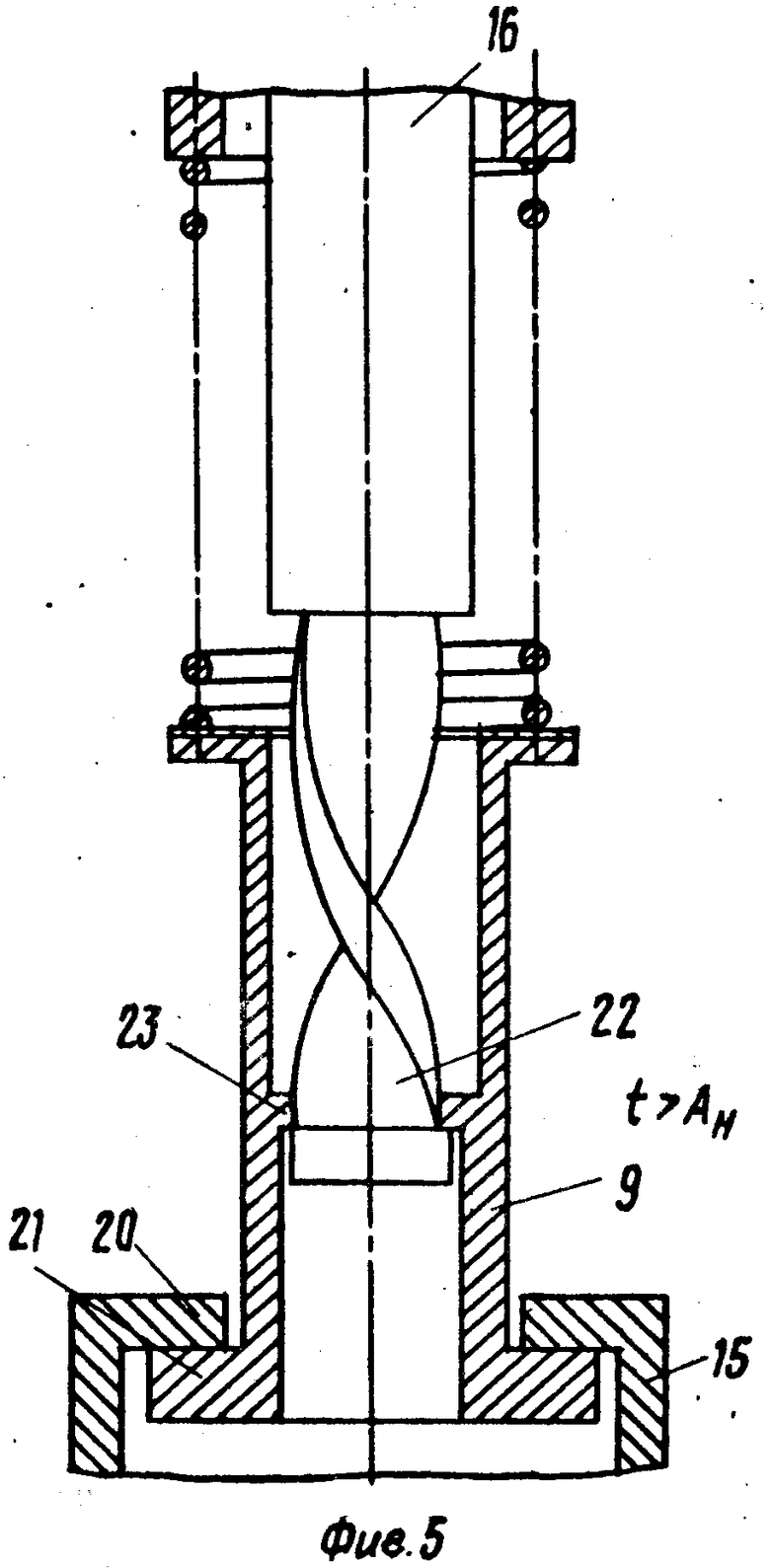
Второй вариант захвата (фиг. 5) включает выполненные на захватной части 15 регулирующего органа и захвате 9 байонетные выступы 20 и 21.
Захват 9 и шток 16 образуют между собой несамотормозящую винтовую пару, состоящую из винта 22 и гайки 23. Шток из никелида титана подвергнут специальной термической обработке с целью придания ему многократной памяти формы. При этом длина штока Lхол при температуре ниже температуры конца прямого мартенситного превращения Мк больше длины штока Lгор при температуре выше температуры обратного мартенситного превращения Ак.
Причем разность Lхол-Lгор должна быть больше зазора δ между выступами 18 и 19 (или выступами 20 и 21 во втором варианте). Зазор δ , в свою очередь, должен быть больше величины осевого перемещения штока, необходимого для сцепления захвата. Т. е. в положении, когда зазор δ = 0, захват должен быть заведомо сцеплен. Условие Lхол-Lгор > δ является необходимым для сцепления и подъема регулирующего органа над кассетой.
Дополнительными условиями следует считать следующее
Lхол - Lгор > δ + δ 3, где δ 3 - возможное перемещение захвата до упора в исполнительный орган. При этом условии шток в своем крайнем сжатом состоянии будет иметь L > Lгор, т. е. находиться в напряженном состоянии. Это позволит повысить число циклов изменения формы штока.
Другим условием является
Lхол - Lгор = δ + δ 1 > δ + δ 2, где δ 2 - максимальное сжатие пружин демпфера при аварийном сбросе регулирующего органа;
δ 1 - расстояние между регулирующим органом и опорной конструкцией активной зоны. При этом условии динамические нагрузки при сбросе будут полностью гаситься демпфером привода.
Вариант, показанный на фиг. 2 соответствует температуре t < Мк, на фиг. 3 - температуре в диапазоне Ан. . . Ак, где Ан - температура начала обратного мартенситного превращения, на фиг. 4 - t < Ак.
Механизм работает следующим образом.
При пуске реактора регулирующий орган 10 установлен на плиту 11 (или на кассету). Рейку 6 посредством электродвигателя 4 через редуктор 5 (но можно при монтаже использовать и ручной привод) опускают в нижнее положение так, что утолщенная часть 17 штока 16 располагается ниже шариков 12, а шарики 12 - ниже бурта 13.
Во втором варианте (фиг. 5) выступы 21 захвата 9 проходят через пазы между выступами 20 захватной части 15 регулирующего органа. Достигается совпадение выступов с пазами соответствующей установкой исполнительного органа относительно регулирующего в плане.
Затем реактор уплотняют, поднимают давление и начинают нагрев теплоносителя в реакторе без извлечения регулирующих органов из активной зоны.
При достижении температурой теплоносителя (и штока) значения Ан (начала обратного мартенситного превращения) шток 16 начинает укорачиваться.
В первом варианте захвата утолщенная часть 17 штока перемещает шарики 12 в проточку 14, соединяя исполнительный и регулирующий органы. При последующем укорочении штока (при увеличении t > Ак) выступ 18 подхватывает захват 9 за выступ 19 и перемещает вверх до упора в исполнительный орган, т. е. пока δ 3 не станет равным 0. При этом регулирующий орган 10 поднимается с плиты 11 и между ним и плитой 11 возникает зазор δ 1.
Во втором варианте при t = Ан. . . Ак шток, двигаясь вверх, поворачивает через винтову пару, состоящую из винта 22 и гайки 23, захват так, что выступы 21 оказываются под выступами 20 и подхватывают их. При дальнейшем подъеме температуры шток с захватом поднимают регулирующий орган.
Механизм управления осуществляет перемещение регулирующего органа 10 посредством электродвигателя 4 через редуктор 5 и рейку 6. При аварийном обесточивании двигателя рейка 6 с регулирующим органом 10 перемещаются вниз, причем гашение их кинематической энергии обеспечивается демпфером 8, с которым взаимодействует бурт 7. Регулирующий орган 10 при сжатии пружины на максимальную величину δ 2 не доходит до плиты 11, таким образом, динамические нагрузки не передаются на конструкции активной зоны.
При остановке и расхолаживании реактора рейку 6 устанавливают на нижний упор. При снижении температуры до Мн (начало прямого мартенситного превращения) шток начинает удлиняться, опуская регулирующий орган на плиту 11, затем при дальнейшем понижении температуры ниже Мк (конец прямого мартенситного превращения) расцепляет захват 9 с захватной частью регулирующего органа. (56) Митенков Ф. М. и др. Исполнительные механизмы управления и защиты для натриевых реакторов на быстрых нейронах. М. : Атомиздат, 1980, с. 58-60.
Авторское свидетельство СССР N 1304632, кл. G 21 C 7/12, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1987 |
|
SU1693998A1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1989 |
|
SU1748544A1 |
| УСТРОЙСТВО ПАССИВНОЙ ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА НА БЫСТРЫХ НЕЙТРОНАХ | 2013 |
|
RU2541515C1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА | 2000 |
|
RU2188469C2 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1981 |
|
SU1061626A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА | 1988 |
|
SU1522973A1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА | 2002 |
|
RU2231143C2 |
| ПРЯМОДЕЙСТВУЮЩЕЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕАКТИВНОСТЬЮ ЯДЕРНОГО РЕАКТОРА | 1997 |
|
RU2122244C1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| ПРИВОД УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2014 |
|
RU2563890C2 |
Изобретение относится к оборудованию ядерных энергетических установок и может быть использовано в механизмах управления ядерных реакторов. Целью изобретения является повышение надежности активной зоны за счет исключения динамических нагрузок на элементы конструкций активной зоны при аварийном сбросе регулирующего органа. Механизм управления ядерного реактора содержит электродвигатель, исполнительный орган, соединяемый с регулирующим органом посредством штока 16 захвата 9, выполненного из материала с эффектом памяти формы, взаимодействующих выступами 18 и 19. Исполнительный орган 6 в крайнем нижнем положении установлен на 0 упор (демпфер). Шток 16 из материала с эффектом памяти формы изменяет длину при температурном мартенситном превращении; при этом длина штока 16 при температуре ниже температуры прямого мартенситного превращения больше длины штока при температуре выше температуры обратного мартенситного превращения. При температуре ниже температуры прямого мартенситного превращения между взаимодействующими выступами 18 и 19 штока 16 и захвата 9 образован зазор σ разница в длине штока при упомянутых температурах больше этого зазора, а он, в свою очередь, больше величины осевого перемещения штока, необходимого для сцепления исполнительного и регулирующего органов. Захват 9 содержит шарики 12, взаимодействующие с выступом 13 и проточкой 14 захватной части 15 регулирующего органа. Возможное перемещение захвата до упора в исполнительный орган определяется величиной d3 . 5 ил.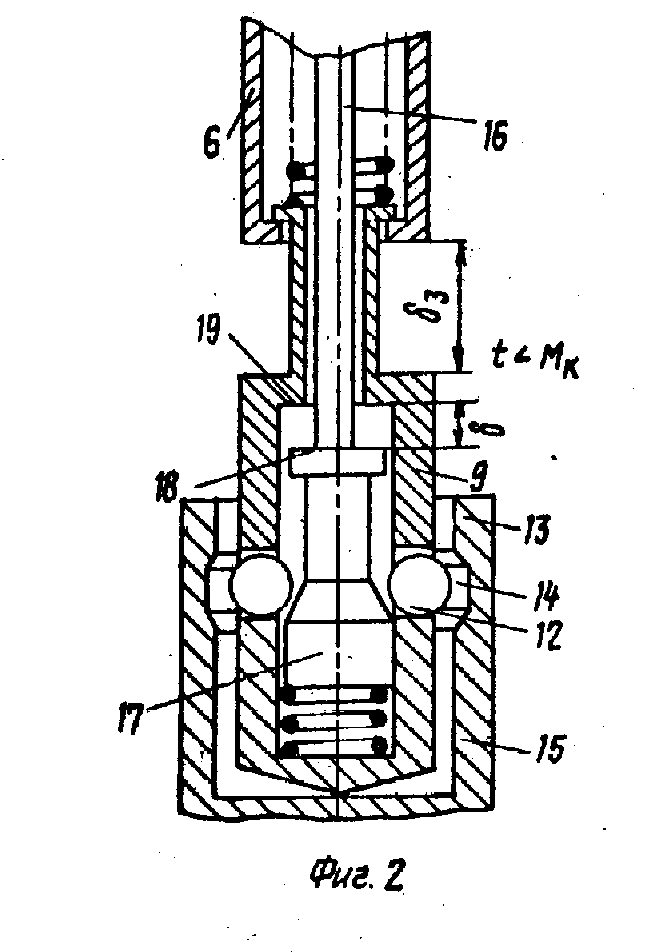
МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА, содержащий двигатель, исполнительный орган, соединенный с регулирующим органом посредством элемента захвата, выполненного из материала, обладающего обратимым эффектом памяти формы, и выполненных на элементе захвата и регулирующем органе, взаимодействующих диаметральных выступов, отличающийся тем, что, с целью повышения надежности активной зоны за счет снижения динамических нагрузок на элементы конструкции активной зоны при аварийном сбросе регулирующего органа, исполнительный орган в крайнем нижнем положении установлен на упор, элемент из материала с эффектом памяти формы выполнен изменяющим длину при температурном мартенситном превращении, при этом длина элемента при температуре ниже температуры прямого мартенситного превращения больше длины элемента при температуре выше температуры обратного мартенситного превращения, при температуре ниже температуры прямого мартенситного превращения между взаимодействующими выступами элемента и захвата образован зазор, разница в длине элемента при упомянутых температурах больше этого зазора, а он в свою очередь больше величины осевого перемещения элемента, необходимого для сцепления исполнительного и регулирующего органов.
