Изобретение относится к исполнительным механизмам системы управления и защиты ядерного реактора и может быть использовано в ядерных энергетических установках.
Цель изобретения - упрощение конструкции.
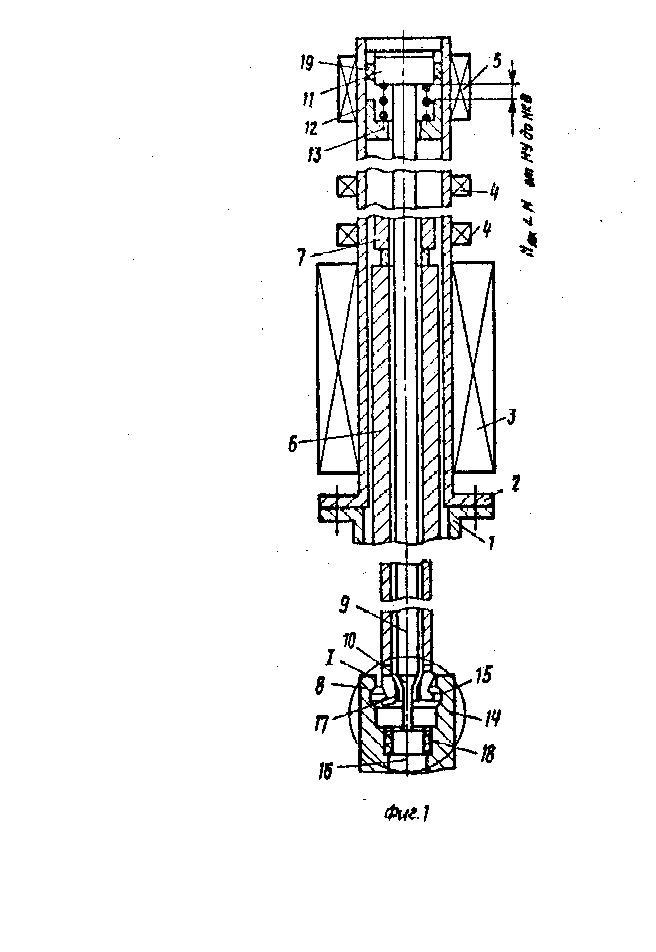
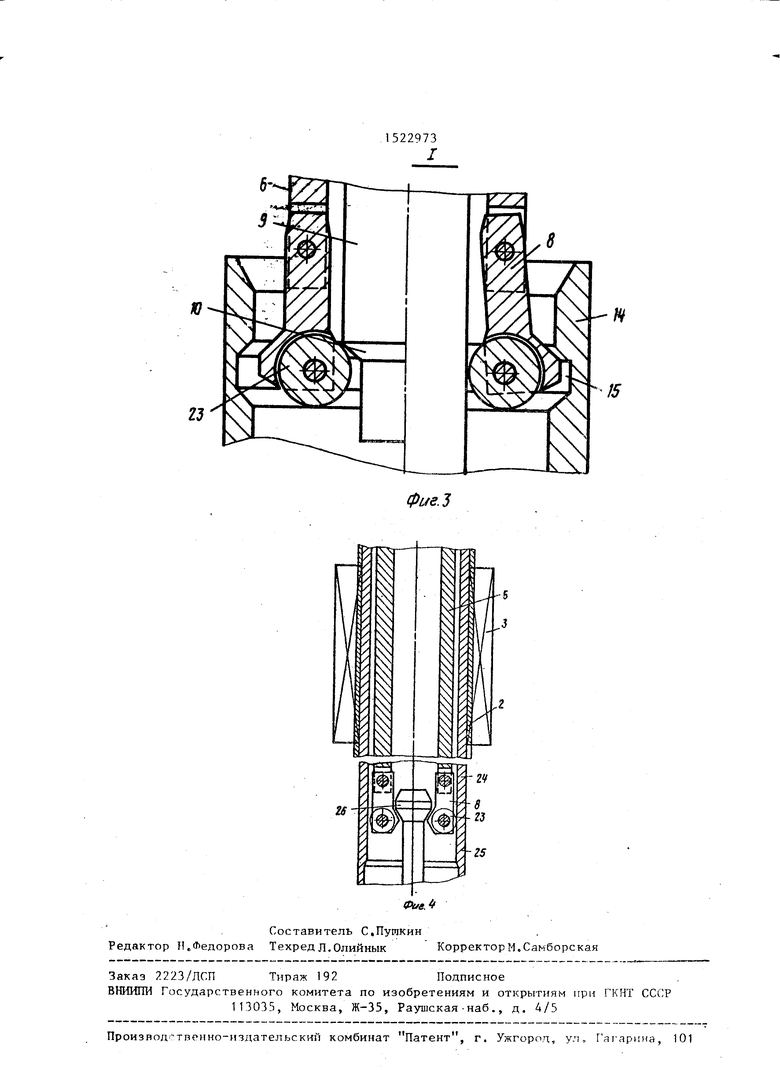
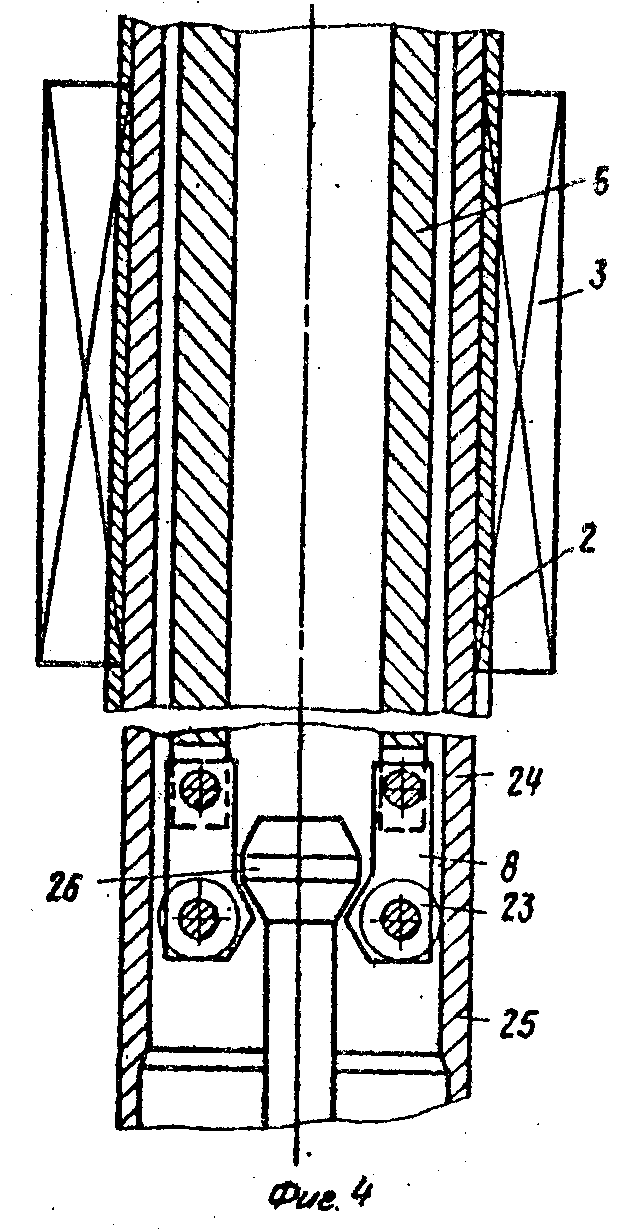
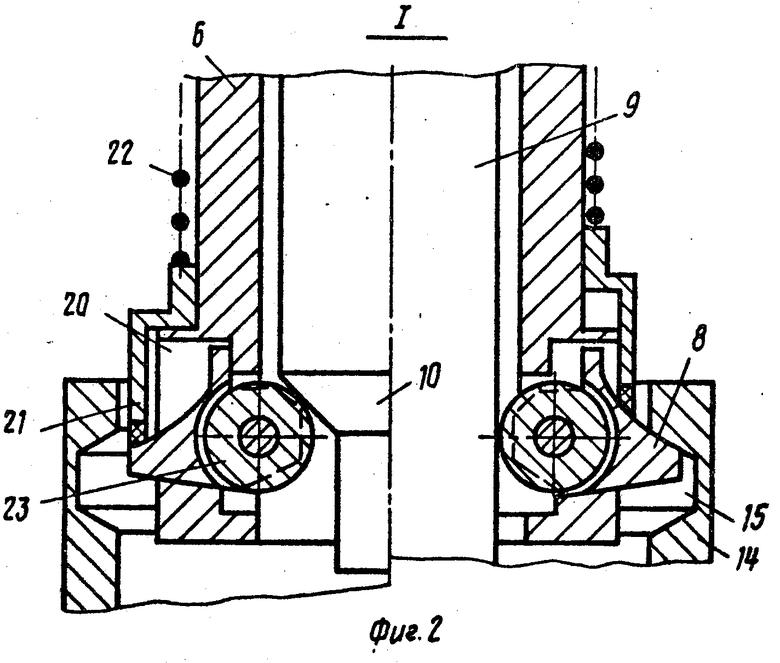
На фиг. 1 показан предлагаемый механизм (положение расцеплено); на фиг. 2 и 3 - варианты выполнения узла I (слева от оси расцеплено, справа сцеплено); на фиг. 4 - вариант выполнения механизма (положение сцеплено).
Механизм содержит установленный на патрубок 1 реактора герметичный чехол 2. Снаружи чехла размещены статор линейного двигателя 3, катушки 4 датчика положения, обмотка электромагнита 5. Внутри чехла расположены якорь 6 (исполнительный орган) линейного двигателя 3, к которому сверху прикреплен шунт датчика 7 положения, а в нижней части рычага 8 (или другие фиксирующие элементы). Внутри якоря 6 расположен шток 9 (элемент управления захватом), в нижней части которого имеется конический участок 10 (участок с изменяющимся поперечным размером). В верхней части к штоку 9 прикреплен якорь 11 электромагнита 5, подпружиненный пружиной 12 относительно стола 13. Рычаги 8 расположены (в крайнем нижнем положении) внутри регулирующего органа 14 напротив выполненных в нем проточек 15. Под регулирующим органом может подниматься и расположенная над непосредственно поглощающим стержнем удлиняющая надставка (промежуточная штанга). Внутри регулирующего органа выполнено продольное отверстие 16, диаметр которого больше диаметра штока 9, а длина больше (или равна) длины хода регулирующего органа. На внутренней поверхности рычагов 8 установлены подшипники 17 скольжения. Подшипник 18 установлен внутри регулирующего органа 14, а подшипник 19 - на якорь 11. Кроме того, подшипники скольжения имеются на якоре 6 (на фиг. 1 условно не показаны).
В варианте выполнения механизма, показанном на фиг. 2, фиксирующие элементы 8 удерживаются в пазах 20 исполнительного органа 6 с одной стороны штоком 9, с другой стороны подпружинены через втулку 21 пружиной 22. В фиксирующих элементах установлены ролики 23.
В варианте выполнения механизма, показанном на фиг. 3, фиксирующие элементы 8 выполнены в виде рычагов с роликами 23.
В варианте выполнения механизма, показанным на фиг. 4, труба 24 расположена внутри чехла 2 и содержит в нижней части конический переход 25 от меньшего диаметра к большему. Регулирующий орган имеет утолщенную головку 26.
Механизм работает следующим образом.
Механизм в собранном виде устанавливают на реактор. При этом рычаги 8 опускаются ниже верхнего торца регулирующего органа 14 и располагаются напротив проточек 15. Включается электромагнит 5, якорь 11 притягивается к столу 13, сжимая пружину 12, шток 9 опускается вниз на ход Няк, его конический участок 10 взаимодействует с рычагами 8 и они сцепляются с регулирующим органом 14.
Двигатель 3 включается на ход вверх и перемещает якорь 6 с регулирующим органом 14 на величину Нст от нижнего упора (НУ) до нижнего конечного выключателя (НКВ).
Положение регулирующего органа на НКВ фиксируется катушками 4 датчика положения. Выключается электромагнит 5 и якорь 11 перемещается пружиной 12 вверх. Но поскольку Няк < Н от НУ до НКВ, то шток 9 не доходит своим коническим участком 10 до рычагов 8 и расцепления не происходит. Далее двигатель 3 перемещает исполнительный орган 6 с регулирующим органом 14 в пределах рабочего хода. При обесточивании двигателя происходит аварийный сброс. После сброса операцию сцепления повторяют.
При перемещении регулирующего органа составляющая от его массы через подшипники 17 скольжения или через ролики 23 передается на шток 9. Предпочтителен вариант с роликами, так как коэффициент трения качения меньше, чем скольжения.
Второй вариант привода работает аналогично, только роль штока 9 в нем играет труба 24, коническим участком 25 вводящая рычаги в зацепление с головкой 26 регулирующего органа.
Изобретение позволяет при более простой конструктивной схеме и малых диаметральных габаритах осуществить автоматическое сцепление-расцепление исполнительного и регулирующего органов, что снижает уровень облучения обслуживающего персонала и сокращает время пуско-наладочных работ. (56) Емельянов И. Я. и др. Основы конструирования исполнительных механизмов управления ядерных реакторов. М. : Энергоатомиздат, 1987, с. 39.
Митенков Ф. М. и др. Исполнительные механизмы органов управления и защиты для натриевых реакторов на быстрых нейтронах. М. , Атомиздат, 1980, с. 62-66.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1981 |
|
SU1061626A1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1987 |
|
SU1693998A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЯДЕРНОГО РЕАКТОРА | 1987 |
|
SU1514160A1 |
| Привод регулирующего органа ядерного реактора | 1984 |
|
SU1227035A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ЧАСТИЧНО ПОВРЕЖДЕННОЙ ДВУХПУЧКОВОЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА, КАМЕРА ДЛЯ РАЗДЕЛКИ И ФАЛЬШТВЭЛ ДЛЯ ВОССТАНОВЛЕНИЯ ТОПЛИВНОЙ СБОРКИ | 1992 |
|
RU2072569C1 |
| Привод регулирующего органа ядерного реактора (его варианты) | 1980 |
|
SU936730A1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1982 |
|
SU1072637A1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1984 |
|
SU1290931A1 |
Изобретение относится к исполнительным механизмам системы управления и защиты ядерного реактора и может быть использовано в ядерных энергетических установках. Целью изобретения является упрощение конструкции. Механизм содержит рычаги 8, которые входят в зацепление с проточками регулирующего органа 14 при перемещении штока 9 (элемента управления захватом) вниз электромагнитом 5, якорь 11 которого имеет ход меньше хода регулирующего органа между его нижним упором и нижним рабочим положением. Поперечный размер элемента управления захватом на всей длине хода регулирующего органа выполнен обеспечивающим сцепление исполнительного и регулирующего органов. В регулирующем органе выполнено продольное отверстие 6 длиной не менее длины хода, а поперечным размером больше поперечного размера элемента управления захватом. Элемент управления захватом может быть выполнен в виде трубы длиной не менее длины хода регулирующего органа и внутренним поперечным размером больше наружного поперечного размера регулирующего органа. 3 з. п. ф-лы, 4 ил.