Изобретение относится к измерительной технике и может быть использовано при контроле перемещений различных объектов, имеющих отражающую поверхность, например, при юстировке зеркал.
Цель изобретения - повышение точности измерений.
Поставленная цель достигается путем уменьшения температурной погрешности и уменьшения влияния среды за счет возможности использования прибора с зарядовой связью, работающего в одинаковых условиях при обработке изображений тест-объектов в одной плоскости.
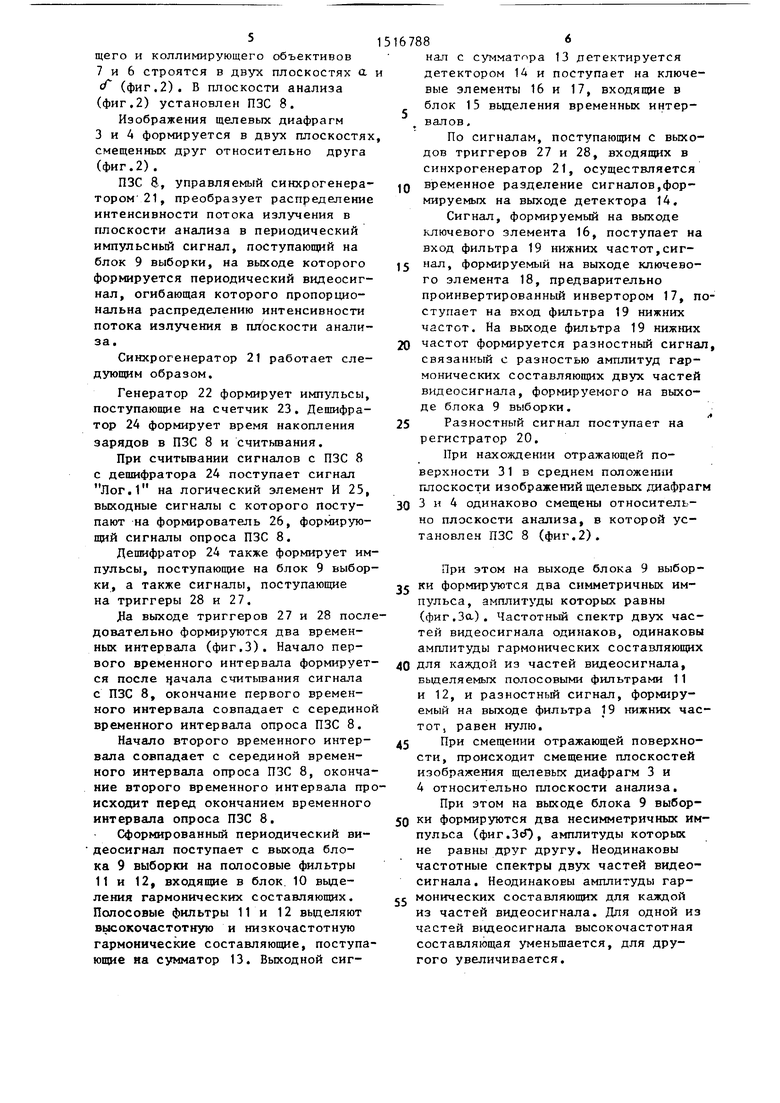
На фиг,1 представлена функциональная схема устройства, реализую- ш,его способа; на фиг. 2 - плоскости формирования изображений двух тест- объектов о, , сГ и плоскость анализа S; на фиг.За, d - временные диаграммы сигна юв, формируемых на выходах отдельных блоков; на фиг.4 - функциональная схема варианта устройства, реализующего способ;на фиг.5 вариант выполнения блока формирования изображений двух диафрагм.
Устройство, реализующее способ (фиг.О, содержит оптически связанные источник 1 света, блок 2 формирования изображений двух диафрагм, состояцц х из ислевых диафрагм 3 и 4, установленных симметрично относительно оптической оси источника 1 света и смещенных друг относительно друга, полупрозрачный элемент 5, коллимирутощий объектив 6, фокусирующий объектив 7, прибор 8 с зарядовой связью () , блок 9 выборки, блок 10 выделега1я гармонической составляющей, выпапненны в виде полосовьгх фильтров 11 и 12, входы которых под а:ючрны к выходу блока 9 выборки, блок 10 вьиеления гармонической составляющей, выполненный в виде полосовых фильтров 11 и 12, входы которых подключены к выходу блока 9 выборки, сумматора 13, входы которого подключены к выходам полосовых фильтров 11 и 12, детектора 14, вход которого подключен к в(1ходу сумматора 13, блок 15 формирования разностного сигнала, выполненный в виде ключевого элемента 16, информадионньш вход которого подключен к выходу детектора 14, инвертора 17, ключевого элемента 18
выход которого подключен к выходу инвертора 17, фильтра 19 нижних частот, вход которого подключен к
выходам ключевых элементов 16 и 18, регистратор 20, вход которого подключен к выходу фильтра 19 нижних частот, синхрогенератора 21, выполненного в виде генератора 22,счетчика 23, вход которого подключен к генератору 22, дешифратора 24, вход которого подключен к выходу счетчика 23, а один из выходов соединен с блоком 9 выборки, логического элемента И 25, входы которого подключены к генератору 22 и дешифратору
24, формирователя 26, вход которого подключен к выходу логического элемента И 25, выход формирователя 26 соединен с ПЗС 8, триггеров 27 и 28, установочные входы которых подключены к дешифратору 24, выходы триггеров 27 и 28 соединены соответственно с управляющими входами ключевых элементов 16 и 18, механизм 29 перемещения и индикатор 30, кинематически связанные с фокусирующим объективом 7.
Измеряется перемещение отражаю- щей поверхности 31.
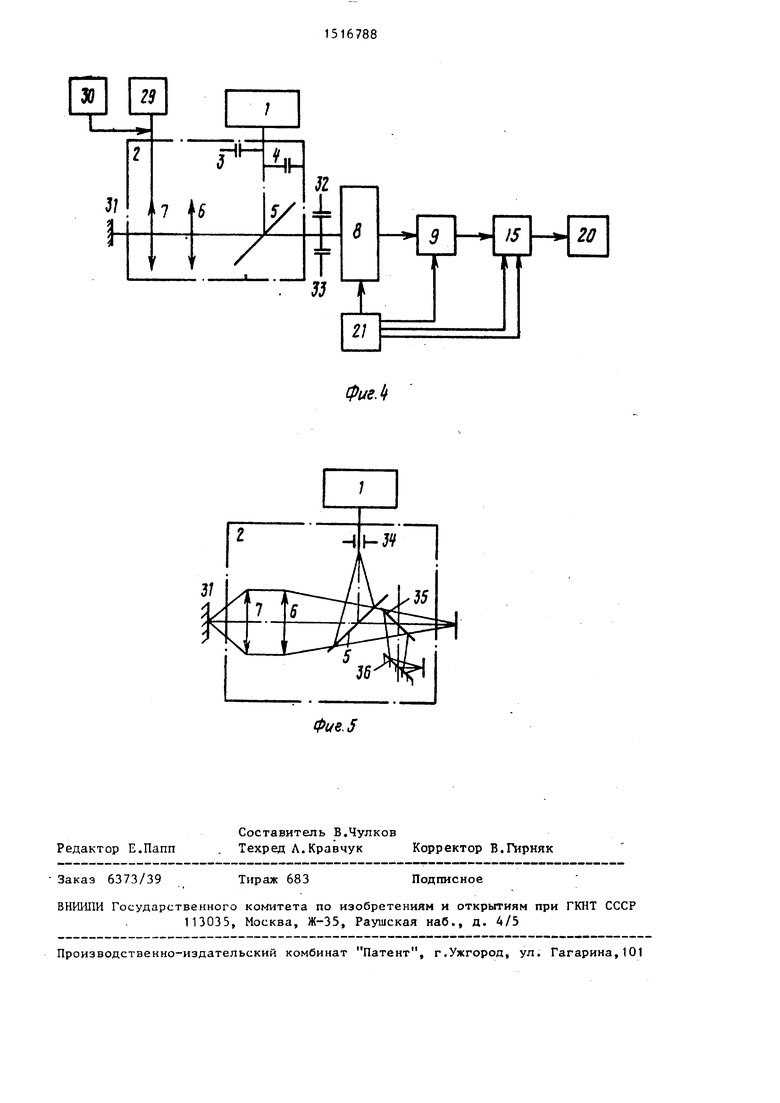
Вариант устройства, реализующий способ (фиг.4), содержит оптически связанные источник 1 света, блок 2 формирования изображений двух диа- фрагм, щелевые диафрагмы 32 и 33, установленные в плоскости анализа, ПЗС 8, блок 9 выборки, блок 15 формирования разностного сигнала, регистратор 20, синхрогенератор 21, ме- хаиизм 29 перемещения, индикатор 30,
Блок формирования изображений двутс диафрагм (фиг.5) может быть выполнен в виде щелевой диафрагмы 34, полупрозрачного элемента 5, кол- лимирующего и фокусирующего объективов 6 и 7, светоделительного элемента 35, зеркала 36,
Способ реализуется следующим образом.
Источник 1 света (фиг.1) форми
рует пучки лучей, направляемые на диафрагмы 3 и 4, входящие в блок 2 формирования изображе1шй двух диафрагм. Изображение щелевьк диафрагм 3 и 4 с помощью светоделительного элемента 5, коллимирующего и фокусирующего объективов 6 и 7 строятся на отражающей поверхности 31 и обратном ходе, с помощью фокусирую5
щего и коллимирующего объективов 7 и 6 строятся в двух плоскостях а. (фиг.2). В плоскости анализа (фиг,2) установлен ПЗС 8.
Изображения щелевых диафрагм 3 и 4 фop иpyeтcя в двух плоскостях смещенных друг относительно друга (фиг.2).
ПЗС 8, управляемый синхрогенера- тором 21, преобразует распределение интенсивности потока излучения в плоскости анализа в периодический импульсный сигнал, поступающий на блок 9 выборки, на выходе которого формируется периодический видеосигнал, огибающая которого пропорциональна распределению интенсивности потока излучения в плоскости анализа.
Синхрогенератор 21 работает следующим образом.
Генератор 22 формирует импульсы, поступающие на счетчик 23. Дешифратор 24 формирует время накопления зарядов в ПЗС 8 и считьшания.
При считьшании сигналов с ПЗС 8 с дешифратора 24 поступает сигнал Лог.1 на логический элемент И 25, выходные сигналы с которого поступают на формирователь 26, формирующий сигналы опроса ПЗС 8.
Дешифратор 24 также формирует импульсы, поступающие на блок 9 выборки, а также сигналы, поступающие на триггеры 28 и 27.
jHa выходе триггеров 27 и 28 послдовательно формируются два временных интервала (фиг.З). Начало первого временного интервала формируется после 1}ачала считьшания сигнала с ПЗС 8, окончание первого временного интервала совпадает с середино временного интервала опроса ПЗС 8.
Начало второго временного интервала совпадает с серединой временного интервала опроса ПЗС 8, окончание второго временного интервала присходит перед окончанием временного интервала опроса ПЗС 8.
Сформированный периодический видеосигнал поступает с выхода блока 9 выборки на полосовые фильтры 11 и 12, входящие в блок. 10 выделения гармонических составляющих. Полосовые фильтры 11 и 12 вьщеляют высокочастотную и низкочастотную гармонические составляющие, поступающие на сумматор 13. Выходной сиг16788
нал с сумматора 13 детектируется детектором 14 и поступает на ключевые элементы 16 и 17, входящие в блок 15 вьделения временных интервалов.
По сигналам, поступающим с выходов триггеров 27 и 28, входящих в Синхрогенератор 21, осуществляется
Q временное разделение сигналов,формируемых на выходе детектора 14. Сигнал, формируемый на выходе ключевого элемента 16, поступает на вход фильтра 19 нижних частот,сигJ5 нал, формируемый на выходе ключевого элемента 18, предварительно проинвертированный инвертором 17, пступает на вход фильтра 19 нижних частот. На выходе фильтра 19 нижних
20 частот формируется разностный сигнал связанный с разностью амплитуд гармонических составляющих двух частей видеосигнала, формируемого на выходе блока 9 выборки.
25Разностный сигнал поступает на
регистратор 20.
При нахождении отражающей поверхности 31 в среднем положении плоскости изображений щелевых диафраг
30 3 н 4 одинаково смещены относительно плоскости анализа, в которой установлен ПЗС 8 (фиг.2).
При этом на выходе блока 9 выбор35 ки формируются два симметричных импульса, амплитуды которых равны (фиг.За). Частотньй спектр двух частей видеосигнала одинаков, одинаковы амплитуды гармонических составляющих
40 каждой из частей видеосигнала, выделяемых полосовыми фильтрами 11 и 12, и разностный сигнал, формируемый на выходе фильтра 19 нижних частот, равен нулю.
45 При смещении отражающей поверхности, происходит смещение плоскостей изображения щелевых диафрагм 3 и 4 относительно плоскости анализа. При этом на выходе блока 9 выбор50 ки формируются два несимметричных импульса (фиг.ЗсО, амплитуды которых не равны друг другу. Неодинаковы частотные спектры двух частей видеосигнала . Неодинаковы амплитуды гарсс монических составляющих для каждой из частей видеосигнала. Для одной из частей В1щеосигнала высокочастотная составляющая уменьшается, для другого увеличивается.
Разностнь:й сигнал, формируо; 1й на выходе фильтра 19 нижних частот и регистрируемый регистратором 20, не равен нулю.
Знак разностного сигнала, ре- (гистрируемого регистратором 20, связан с направлением перемещения отражающей поверхности 31 относительно среднего положения. С-помощью механизма 29 перемещений перемещают фокусирующий объектив 7 до положения, при котором показания регистратора 20 не станут близкими к нулю.
Величину смещения отражающей поверхности 31 фиксируют индикатором 30
При больших смещениях отражающей поверхности 31 в спектре видеосигнала мало высокочастотных гармонических составляющих, и разностный сигнал форм11руется путем сравнения амплитуд низкочастотных гармонических составляющих, вьщеляемых полосвым фильтром 12.
При малых смещениях отражающей поверхности в спектре видеосигнала появляются высокочастотные гармонические составляющие, а разностный сигнал формируется путем сравнения амплитуд высокочастотных гармонических составляющих, вьвделяемых полосовым фильтром 11.
При малых смещениях отражающей поверхности возможно исключение пало- сового фильтра 12 и сумматора 13. При этом сигнал, снимаемый с полосового фильтра 11, поступает на детектор 14.
В варианте реализации способа (фиг.4) в плоскости анализа устанавливаются щелевые диафрагмы 32 и 33, осуществляющие пространственную фильтрацию изображений щелевых диафрагм 3 и 4. При этом сигнал,снимаемый с выхода блока 9 выборки, поступает на блок 15 формирования разностного сигнала.
При нахождении отражающей поверхности 31 в среднем положении энергии потоков излучения, прошедшие через щелевые диафрагмы 32 и 33,рав ны. Видеосигнал, формируемый на выходе блока 9 выборки, содерткит два симметричных импульса, энергии которых равны.
Регистратор 20 регистрирует нулевой разностный сигнал.
При смещении отражающей поверхности 31 относительно среднего положения энергии потоков излучения, прошедших через щелевые диафрагмы 3 и 4, не равны друг другу. Видеосигнал, формируемый на выходе блока 9 выборки, содержит два импульса, энергии которых не равны друг другу вследствие ограничения пучков лучей,
осуществляющих построение изображений двух щелевых диафрагм, апертурами анализирующих диафрагм 32 и 33. Регистратор 20 регистрирует не-
нулевой разностный сигнал, знак которого указывает на направление смещения отражающей поверхности 32. Осуществляют перемещение фокусирующего объектива 7 механизмом 29 перемещения до положения, при котором разностный сигнал, регистрируемый регистратором 20, становится равным нулю.
Возможна иная реализация блока
2 формирования изображений двух диафрагм (фиг.5).
Изображение щелевой диафрагмы 34 с помощью светоделительного элемента 5, коллимирующего и фокусирующег о объективов 6 и 7 строится на отражающей поверхности 31 и в обратном ходе, с помощью фокусирующего и коллимирующего объективов 7 и 6 строится в плоскости f (фиг.2).
Часть пучков лучей отражается светодепительным элементом 35, зеркалом 36 и строится в плоскости анализа о, (фиг.2) .
Предлагаемое выполнение блока 2
формирования изображения двух диафрагм является менее предпочтительным по энергетике по сравнению с исполнением, представленным на фиг.1 и 4, так как осуществляется потеря
энергии на светоделительном элементе 35 в два раза.
Формула изобретения
1. Способ измере1шя расстояния
до отражающей поверхности,заключающийся в том, что формируют с помощью источника света и отражающей поверхности изображения двух тестобъектов, смещенных друг относительно друга в направлении, перпендикулярном направлению хода лучей, пе.- Рвмещают изображения двух тест-объектов отражающей поверхности, фор
мируют сигнал, фиксируют величину перемещения изображений двух тест- объектов при равенстве нулю сигнала и по величине перемещения изображений определяют расстояние до отражающей поверхности, отличающийся тем, что, с целью повышения точности измерений, изображения двук тест-объектов одновременно со смещением в направлении, перпендикулярном ходу лучей, смещают в направлении хода лучей, перед формированием сигнала преобразуют распределение интенсивности потока излучения от двух тест-объектов в плоскости анализа, перпендикулярной направле
1678810
нию хода , в периодически видеосигнал, разделяют по времени периодический видеосигнап на два видеосигнала так, что момент времени разделения периодического видеосигнала на два находится между моментами времени преобразования распределения интенсивности потока излучения от двух тест-объектов в периодический видеосигнал, а сигнал формируют из двух видеосигналов.
2, Способ по П.1, отлича ю- щ и и с я тем, что проводят пространственную фильтрацию изображений двух тест-объектов в плоскости ана10
15
лиза.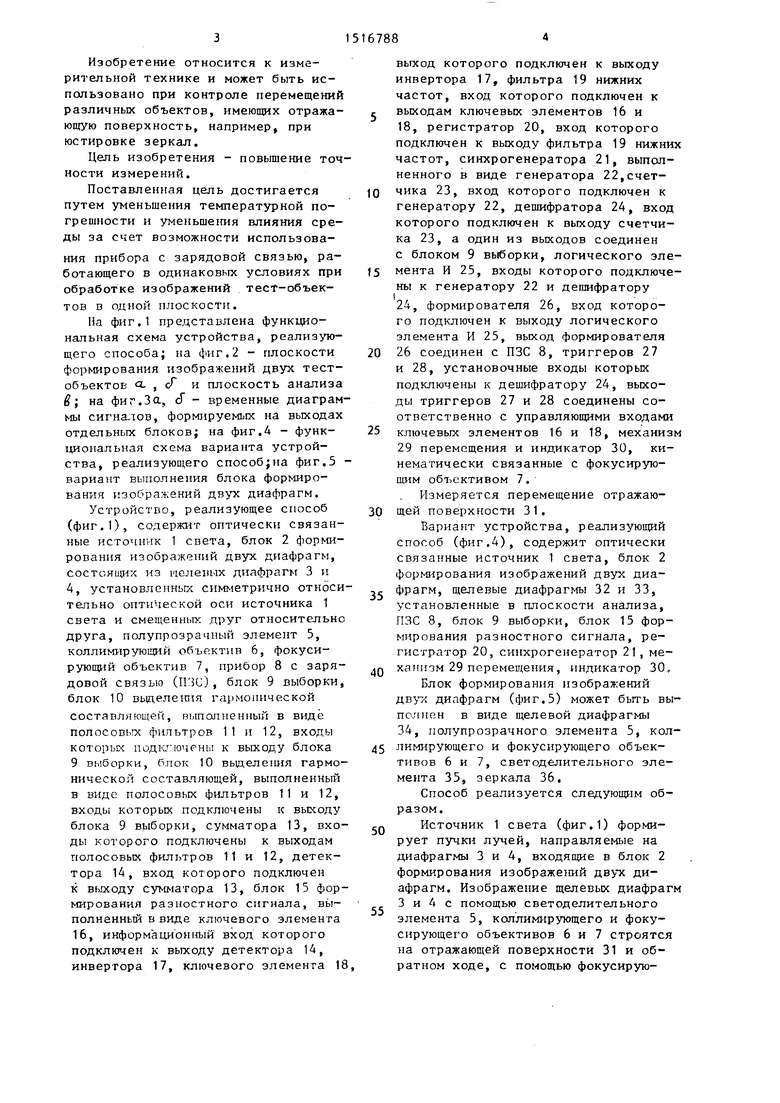
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения расстояния до отражающей поверхности | 1986 |
|
SU1350500A1 |
| Фокусирующее устройство | 1987 |
|
SU1506316A1 |
| Устройство для измерения расстояния до отражающей поверхности | 1986 |
|
SU1320663A1 |
| Способ измерения положения объекта и устройство для его осуществления | 1988 |
|
SU1539525A1 |
| Способ измерения расстояния до отражающей поверхности и устройство для его осуществления | 1985 |
|
SU1539527A1 |
| Способ контроля децентрировки элемента оптической системы | 1984 |
|
SU1290122A1 |
| Способ измерения коэффициэнта передачи модуляции оптической системы | 1991 |
|
SU1774207A1 |
| Устройство для измерения рабочего отрезка объективов | 1981 |
|
SU1004796A1 |
| Способ контроля качества изображения оптических и оптико-электронных систем | 1986 |
|
SU1520373A1 |
| Устройство для измерения рабочего отрезка объективов | 1982 |
|
SU1049768A1 |
Изобретение относится к измерительной технике и может быть использовано при контроле перемещений объектов, имеющих отражающую поверхность. Цель изобретения - повышение точности измерений достигается путем уменьшения температурной погрешности и уменьшения влияния среды за счет возможности использования прибора с зарядовой связью, работающего в одинаковых условиях при обработке изображений тест-объектов в одной плоскости. Источник 1 света освещает щелевые диафрагмы 3,4, изображения которых с помощью полупрозрачного элемента 5 коллимирующего и фокусирующего объективов 6,7 строятся на отражающей поверхности 31, а в обратном ходе - на поверхности прибора 8 с зарядовой связью (ПЗС). ПЗС 8 опрашивается синхрогенератором 21. Гармонические составляющие видеосигнала выделяются блоком 10 выделения гармонической составляющей, селектируются и усредняются по времени блоком 15 формирования разностного сигнала, управляемого синхрогенератором 21. Разностный сигнал регистрируется регистратором 20. При смещении отражающей поверхности 31 от среднего положения происходит одновременное фокусирование и расфокусирование двух изображений щелевых диафрагм 3,4 на поверхности ПЗС 8. Регистратор 20 фиксирует сигнал, знак которого связан с направлением перемещения отражающей поверхности. 1 з.п. ф-лы, 5 ил.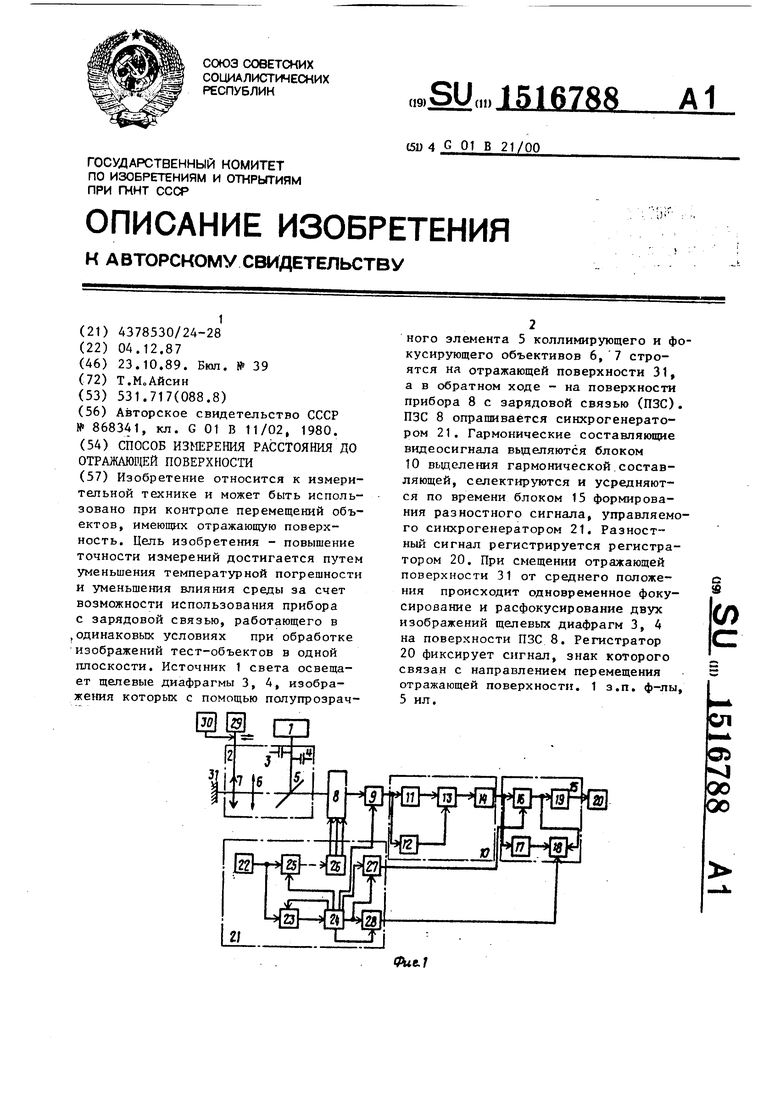
а
и
G S 5
Фиг. 2
УУ /1Л.
фие.З
Фиг Л
Фие.
Редактор Е.Папп
Составитель В.Чулков
Техред Л.Кравчук Корректор В.Гирняк
Закаэ 6373/39
Тираж 683
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
п
Подписное
| Устройство для бесконтактного измерения расстояний | 1980 |
|
SU868341A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
