Изобретение относится к измерительной технике и может быть использовано для измерения положения объекта, имеющего несколько отражающих поверхностей, например для контроля положения линзы.
Цель изобретения - повышение точности измерения положения объекта за счет измерения.пространственного положения различных поверхностей объекта.
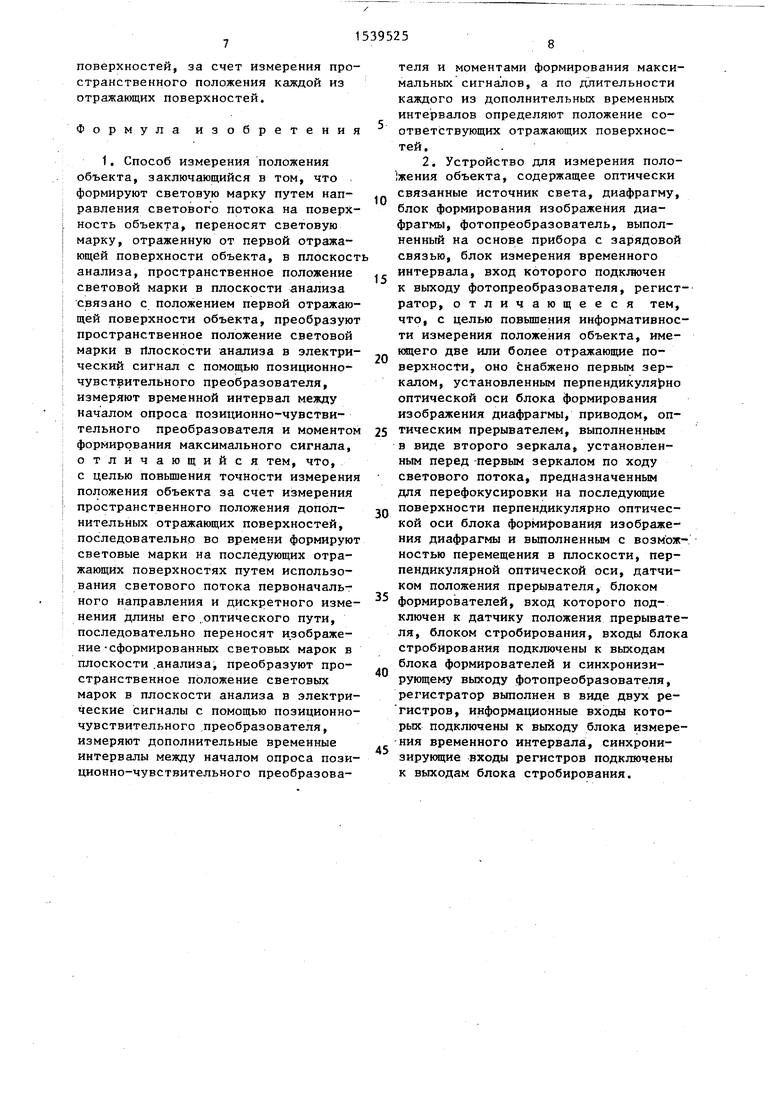
На фиг. 1 представлена функциональная схема устройства лля измере- ния положения объекта} на фиг. 2 - временные диаграммы сигналов, формируемых на выходах отдельных блоков $ на фиг. 3 - расположение изображения щелевой диафрагмы относительно светочувствительной площадки прибора с зарядовой связью.
Устройство (фиг. 1) содержит оптически связанные источник 1 света, щелевую диафрагму 2, блок 3 формирования изображения диафрагмы, выполнен- ный в виде полупрозрачного элемента 4, объектива 5, полупрозрачного элемента 6, первого зеркала 7, установленного перпендикулярно оптической оси объектива 5, привод 8, оптический прерыватель 9, связанный с приводом 8 выполненный в виде второго зеркала 10, установленного перпендикулярно оптической оси объектива 5, датчик 11 положения прерывателя, выполненный в виде светоднода 12 и фотодиода 13, оптически связанных с оптическим преобразователем 9, фотопре.образова- тель 14, выполненный в виде прибора 15 с зарядовой связью (ПЗС) и синхро- генератора 16, управляющий выход которого соединен с ПЗС 15, блок 17 измерения временного интервала, выполненный в виде амплитудного дискриминатора 18, вход которого подключен к выходу ПЗС 15, триггера 19, вход установки в О которого подключен к выходу амплитудного дискриминатора 18, вход установки 1 триггера 19 подключен к синхронизирующему выходу синхрогенератора 16, элемента И 20, входы которого подключены к выходу триггера 19 и синхронизирующему выходу синхрогенератора 16, счетчика 21, счетный вход которого подключен к выходу элемента И 20, и эле- мента 22 задержки, вход и выход которого соединены соответственно с синхронизирующим выходом синхрогенерато
0
.
g
$ 50 55
0
40
45
ра 16 и входом установки в О счетчика 21, регистратор 23, выполненный в виде регистров 24 и 25, информационные входы которых подключены к счетчику 21, блок 26 формирователей, выполненный в виде формирователей 27 и 28, входы которых подключены к фотодиоду 13, блок 29 стробирования, выполненный в виде элементов И 30 и 31, первые входы которых подключены к выходам формирователей 27 и 28, вторые входы - к синхронизирующему выходу синхрогенератора 16, а выходы соединены с синхронизирующими выходами регистров 24 и25.
Измеряется положение объекта 32, имеющего отражающие поверхности 33 и 34.
Устройство работает следующим образом.
- Источник 1 света формирует пучки лучей, направляемые на щелевую диафрагму 2. Пучки лучей, прошедшие через щелевую диафрагму 2, отражаются от полупрозрачного элемента 4, входящего в блок 3 формирования изображения диафрагмы, проходят объектив 5, полупрозрачный элемент 6, отражаются от первого зеркала 7, полупрозрачного элемента 6 и падают на отражающую поверхность 33 объекта 32. На отражающей поверхности 33 формируется изображение щелевой диафрагмы 2, Отраженные от отражающей поверхности 33 пучки лучей в обратном ходе отражаются от полупрозрачного элемента 6, первого зеркала 7, проходят полупрозрачный элемент 6, объектив 5, полупрозрачный элемент 4 и падают на светочувствительную площадку ПЗС 15, входящего в фотопреобразователь 14 и расположенного за плоскостью изображения диафрагмы 2.
На светочувствительной площадке ПЗС 15 формируется размытое изображение щелевой диафрагмы 2, положение которого пространственно связано с положением отражающей поверхности 33. При измерении пространственного положения отражающей поверхности 33 при ее повороте относительно одной из координат происходит смещение размытого изображения щелевой диафрагмы 2 относительно светочувствительной поверхности ПЗС 15.
Синхрогенератор 16 формирует сигнал опроса ПЗС 15. На выходе ПЗС 15 периодически формируется видеосигнал амплитуда которого пропорциональна распределению освещенности размытого изображения щелевой диафрагмы 2 относительно светочувствительной поверхности ПЗС 15.
В начале формирования видеосигнала синхрогенератор 16 формирует импульс, перебрасывающий триггер 19, входящий в блок 17 измерения временного интервала, в состояние 1.
Видеосигнал с ПЗС 15 поступает на вход амплитудного дискриминатора 18. При превышении видеосигналом порогового значения на выходе амплитудного дискриминатора 18. формируется импульс, перебрасывающий триггер 19 в состояние О.
Сигнал, формируемый триггером 19, поступает на первый вход элемента И 20, на второй вход которого поступают заполняющие импульсы с выхода синхрогенератора 16.
На выходе элемента И 20 периодически формируются пачки импульсов, количество которых подсчитываются счетчиком 21. После окончания опроса ПЗС 15 синхрогенератор 16 формирует импульс, который задерживается элементом 22 задержки. Задержанный по времени импульс периодически сбрасы- |вает счетчик 21 в 0м.
Таким образом, в счетчике 21 периодически накапливается результат измерения временного интервала, величина которого связана с положением отражающей поверхности 33 объекта 32
Привод 8 вращает оптический прерыватель 9. При перемещении второго зеркала 10, входящего в оптический прерыватель 8, в положение, при котором второе зеркало 10 отражает пучки лучей, прошедшие объектив 5, происходит уменьшение длины хода лучей.
При этом изображение щелевой диафрагмы 2 строится на отражающей поверхности 34 объекта 32 и в обратном ходе - на светочувствительной площадке ПЗС 15.
В счетчике 21 периодически накапливается результат измерения временного интервала, величина которого связана с положением отражающей поверхности 34.
Оптический прерыватель 9 периодически перекрывает пучки лучей, про
0
5
0
шедшие объектив 5. При этом происходит последовательная фокусировка изображения щелевой диафрагмы 2 на отражающие поверхности 33 и 34 объекта 32. Период вращения оптического прерывателя 9 равен или ниже периода опроса ПЗС 15.
На фотодиод 13, входящий в датчик 11 положения прерывателя, периодически проходит излучение светодиода 12. На выходе фотодиода 13 формируется сигнал, связанный с пространственным положением второго зеркала 10,
Сигнал с фотодиода 13 поступает на формирователи 27 и 28, входящие в блок 26 формирователей. На выходе формирователя 27 формируется сигнал при отражении пучков лучей от первого зеркала 7, на выходе формирователя 28 формируется сигнал при отражении пучков лучей от зеркала 10.
Сигналы, сформированные формирователями 27 и 28, поступают на первые 5 входы элементов И 30 и 31, входящие в блок 29 стробирования. На вторые входы элементов И 30 и 31 поступает импульс с синхрогенератора 16 в конце опроса ПЗС 15.
При отражении пучков лучей от отражающей поверхности 33 на выходе элемента И 30 формируется импульс, поступающий на синхронизирующий вход регистра 24, входящего в регистратор 23. В регистре 24 фиксируется результат измерения пространственного положения отражающей поверхности 33.
При отражении пучков лучей от отражающей поверхности 34 на выходе элемента И 31 формируется импульс, поступающий на синхронизирующий вход регистра 25. В регистре 25 фиксируется результат измерения пространст- fвенного положения отражающей поверх- 5 ности 34.
При использовании в качестве объектов линз построение изображения щелевой диафрагмы 2 может осуществляться как на отражающие поверхности линзы, так и в центры кривизны поверхностей линзы. При этом ПЗС 15 устанавливается соответственно за плоскостью или в плоскости изображения щелевой диафрагмы 2.
Использование предлагаемых способа и устройства позволяет повысить точность измерения положения объекта, имеющего несколько отражающих
0
5
0
5
поверхностей, за счет измерения пространственного положения каждой из отражающих поверхностей.
Формула изобретения
1. Способ измерения положения объекта, заключающийся в том, что формируют световую марку путем направления светового потока на поверхность объекта, переносят световую марку, отраженную от первой отражающей поверхности объекта, в плоскост анализа, пространственное положение световой марки в плоскости анализа связано с положением первой отражающей поверхности объекта, преобразуют пространственное положение световой марки в плоскости анализа в электрический сигнал с помощью позиционно- чувствительного преобразователя, измеряют временной интервал между началом опроса позиционно-чувстви- тельного преобразователя и моментом формирования максимального сигнала, отличающийся тем, что, с целью повышения точности измерения положения объекта за счет измерения пространственного положения дополнительных отражающих поверхностей, последовательно во времени формируют световые марки на последующих отражающих поверхностях путем использования светового потока первоначального направления и дискретного изменения длины его .оптического пути, последовательно переносят изображение -сформированных световых марок в плоскости .анализа, преобразуют пространственное положение световых марок в плоскости анализа в электрические сигналы с помощью позиционно- чувствительного преобразователя, измеряют дополнительные временные интервалы между началом опроса пози- ционно-чувствительного преобразова
5
теля и моментами формирования максимальных сигналов, а по длительности каждого из дополнительных временных интервалов определяют положение соответствующих отражающих поверхностей.
2. Устройство для измерения поло- Ькения объекта, содержащее оптически связанные источник света, диафрагму, блок формирования изображения диафрагмы, фотопреобразователь, выполненный на основе прибора с зарядовой связью, блок измерения временного интервала, вход которого подключен
0
к выходу фотопреобразователя, регистратор, отличающееся тем, что, с целью повышения информативности измерения положения объекта, имеющего две или более отражающие поверхности, оно снабжено первым зеркалом, установленным перпендикулярно оптической оси блока формирования изображения диафрагмы, приводом, оп5 тическим прерывателем, выполненным в виде второго зеркала, установленным перед -первым зеркалом по ходу светового потока, предназначенным для перефокусировки на последующие
д поверхности перпендикулярно оптической оси блока формирования изображения диафрагмы и выполненным с возможностью перемещения в плоскости, перпендикулярной оптической оси, датчиком положения прерывателя, блоком
5 формирователей, вход которого подключен к датчику положения прерывателя, блоком стробирования, входы блока стробирования подключены к выходам блока формирователей и синхронизирующему выходу фотопреобразователя, регистратор выполнен в виде двух регистров, информационные входы которых подключены к выходу блока измерения временного интервала, синхронизирующие входы регистров подключены к выходам блока стробирования.
0
5
Фиг. 2
г
«-V5
Фиг. J

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения расстояния до отражающей поверхности | 1987 |
|
SU1516788A1 |
| Устройство для измерения расстояния до отражающей поверхности | 1986 |
|
SU1320663A1 |
| Устройство для измерения расстояния до отражающей поверхности | 1986 |
|
SU1350500A1 |
| Фокусирующее устройство | 1987 |
|
SU1506316A1 |
| Устройство для измерения расстояний между отражающими поверхностями | 1984 |
|
SU1180697A1 |
| Устройство для контроля фокусного расстояния и линейного увеличения оптических и оптико-электронных систем | 1984 |
|
SU1383126A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕЧНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1493074A1 |
| СПОСОБ И УСТРОЙСТВО АЗИМУТАЛЬНО-УГЛОМЕСТНОЙ ИНДИКАЦИИ В ОПТИКО-ЛОКАЦИОННЫХ СИСТЕМАХ | 2015 |
|
RU2628301C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ И (ИЛИ) ДИАМЕТРА | 1998 |
|
RU2156434C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ГРАНИЦЫ ОБЪЕКТА | 2000 |
|
RU2172470C1 |
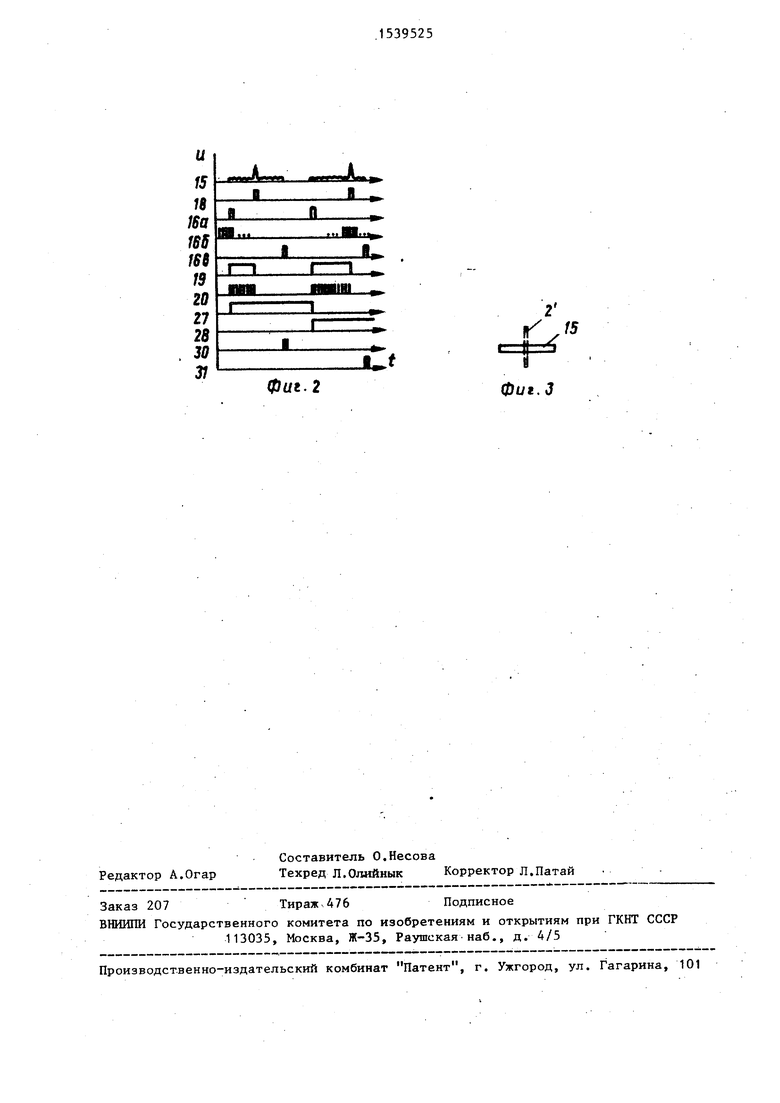
Изобретение относится к измерительной технике. Цель изобретения - повышение точности измерения положения объекта за счет измерения пространственного положения дополнительных отражающих поверхностей. Изображение щелевой диафрагмы 2 освещаемой источником 1 света, строится с помощью блока 3 формирования изображения диафрагмы, зеркала 7 на отражающей поверхности 33 объекта 32. Автоколлимационное расфокусированное изображение щелевой диафрагмы 2 строится в обратном ходе на фотопреобразователе 14, выполненном на основе прибора 15 с зарядовой связью (ПЗС) в виде световой марки. ПЗС 15 формирует периодический видеосигнал. Пространственное положение световой марки, связанное с угловым положением отражающей поверхности 33, преобразуется во временной интервал, величина которого измеряется блоком 17 измерения временного интервала. Оптический прерыватель 9, вращаемый приводом 8, периодически изменяет длину хода лучей, что приводит к перефокусировке изображения диафрагмы 2 на отражающую поверхность 34 объекта 32. Положение оптического прерывателя 9 фиксируется датчиком 11 положения прерывателя. Блок 26 формирователей и блок 17 измерения временного интервала формируют сигналы, преобразуемые блоком 29 синхронизации в синхронизирующие импульсы, по которым информация о величине углового положения отражающих поверхностей 33, 34 объекта 32 записывается в регистры 24, 25. 3 с.п. ф-лы, 3 ил.
| Способ измерения положения объекта и устройство для его осуществления | 1982 |
|
SU1067352A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
