Известны системы связанного регулирования двух параметров, содержащие датчики положения регулирующих органов, индикатор знака отклонения регулируемого параметра от заданного значения, блок правления и два исполнительных устройстваДля обеспечения необходимого запаса устойчивости предлагаемой системы датчики положения регулирующих органов подсоединяют через запоминающее устройство, фиксирующее поочередно отклонения регулирующих органов от заданного значения, и переключатель к схеме перекрестной блокировки.
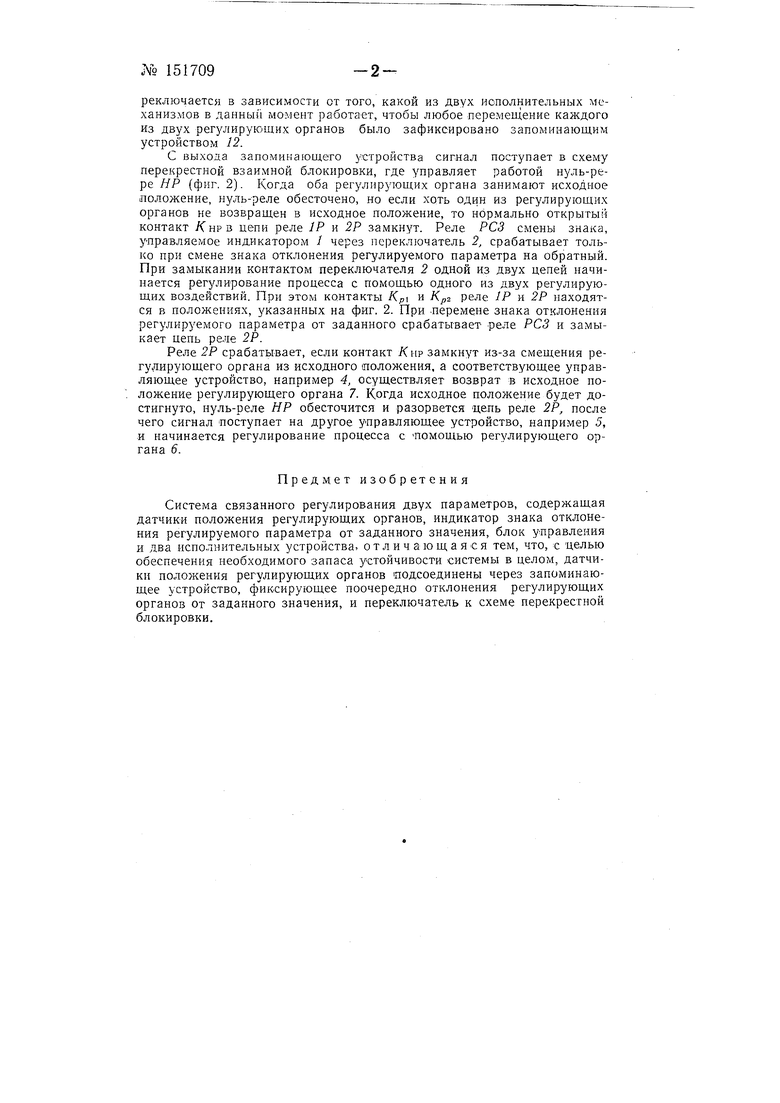
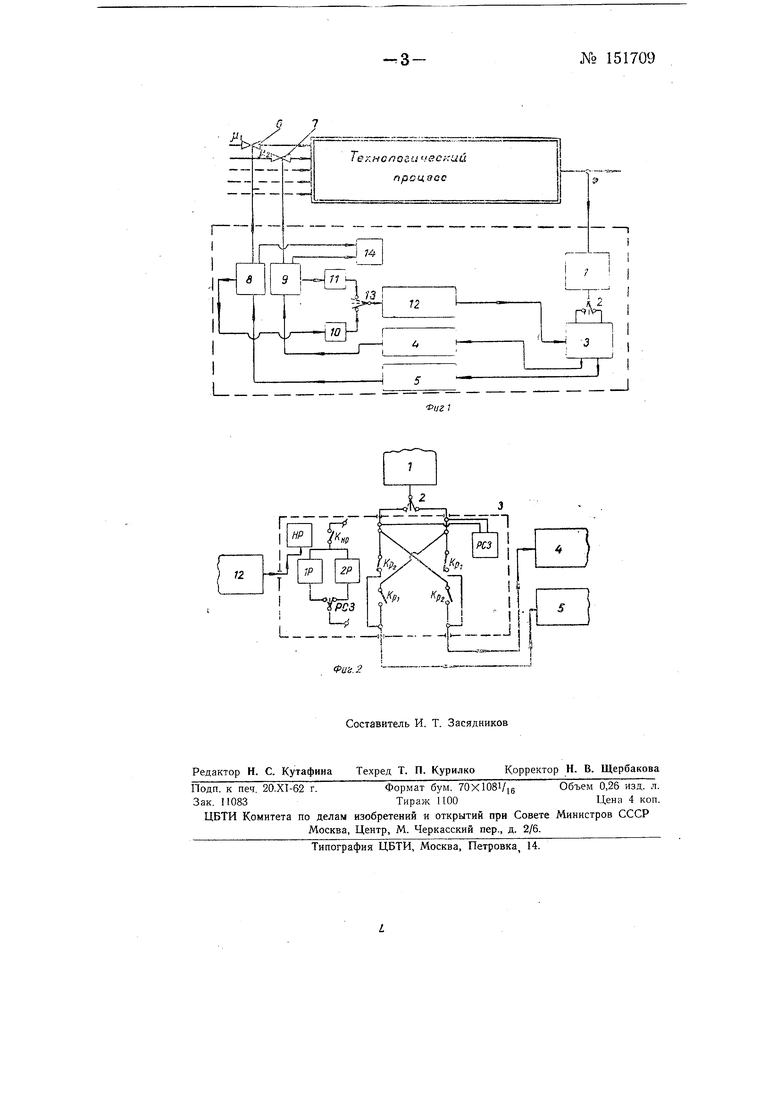
На фиг. I изображена блок-схема -предложенного устройстра; ьа фиг. 2 -схема перекрестной взаимной блокировки.
Регулируемый параметр ф подается на вход индикатора 1 знака отк:1онения регулируемого параметра от заданного значения, на выходе которого имеется переключатель 2, управляемый- индикатором / в зависимости от знака отклонения регулируемого параметра. Если отклонение равно нулю, то на вход схемы 3 перекрестной взаимной блокировки сигнал через переключатель 2 не поступает (контакт в среднем положении). При наличии отклонения регулируемого параметра сигнал поступает на одно из двух управляющих устройств 4 и 5, которые связаны с обоими регулирующими органами 5 и 7 через исполнительные механизмы И и 9. Устройства 4 и 5 поочередно, в зависимости от знака отклонения регулируемого параметра, осуществляют регулирующие воздействия 1 и i. Чтобы при переходе с одного регулирующего воздействия на другое исключить накопление воздействия нарастающим итогом, введена внутренняя обратная связь по величине регулирующих воздействий, состоящая из датчиков 10 и 11 положения регулирующих органов, запоминающего устр,ойства 12, связанного с датчиками через переключатель / и со схемой 5 перекрестной взаимной блокировки. Переключатель 13 управляется дифференциальным реле 14, которое пе№ 151709-2
реключается в зависимости от того, какой из двух исполнительных механизмов в даннын момент работает, чтобы любое перемещение каждого из двух регулирующих органов было зафиксировано запоминающим устройством 12.
С выхода запоминающего устройства сигнал поступает в схему перекрестной взаимной блокировки, где управляет работой нуль-рере HP (фиг. 2). Когда оба регулирующих органа занимают исходное положение, нуль-реле обесточено, но если хоть один из регулирующих органов не возвращен в исходное положение, то нормально открытый контакт /С HP в цепи реле JP и 2Р замкнут. Реле РСЗ смены знака, управляемое индикатором / через переключатель 2, срабатывает только при смене знака отклонения регулируемого параметра на обратный. При замыкании контактом переключателя 2 одной из двух цепей начинается регулирование процесса с помощью одного из двух регулирующих воздействий. При этом контакты /Cpi и реле IP и 2Р находятся в положениях, указанных на фиг. 2. При -перемене знака отклонения регулируемого параметра от заданного срабатывает реле РСЗ и замыкает цепь ре.ле 2Р.
Реле 2Р срабатывает, если контакт КНР замкнут из-за смещения регулирующего органа из исходного положения, а соответствующее управляющее устройство, например 4, осуществляет возврат в исходное положение регулирующего органа 7. Когда исходное положение будет достигнуто, нуль-реле HP обесточится и разорвется цель реле 2Р, после чего сигнал поступает на другое управляющее устройство, например 5, и начинается регулирование процесса с помощью регулирующего органа 6.
Предмет изобретения
Система связанного регулирования двух параметров, содержащая датчики положения регулирующих органов, индикатор знака отклонения регулируемого параметра от заданного значения, блок управления и два исполнительных устройства, отличающаяся тем, что, с целью обеспечения необходимого запаса устойчивости системы в целом, датчики положения регулирующих органов подсоединены через запоминающее устройство, фиксирующее поочередно отклонения регулирующих органов от заданного значения, и переключатель к схеме перекрестной блокировки.