Изобретение относится к устройствам для управления прядильной машиной или же рабочими органами прядильных мест, образованных прядильными камерами (роторами), питающими валиками и расчесывающими валиками лент, волокон и кроме того, ОТВОДЯЩИМИ валиками и механизмами намотки (наматывающими валиками) оттягиваемой пряжи, привод которых осуществляется управляющим устройством, электродвигателями с питанием с помощью регулируемых преобразователен частоты или напряжения .
Известны.способы управления много- двигательным приводом пневмомеханических прядильных машин, применяющие
электродвигатели постоянного тока с механическими устройствами для установки соотношения частоты вращения рабочих органов (патент ФРГ№2118775, кл1 D 01 HI/12, 1974), илиже электрр- двигателями переменного тока без возможности установки соотношений частог ты вращения (патент ЧССР № 177136, кл. D 01 Н 1/12, 1979).
Далее известен групповой электропривод рабочих органов машины, применяющий электромагнитные муфты для запрядки (авторское свидетельство ЧССР № 151696, кл.D01 Н 1/12, 1973). Также известен групповой электропривод с применением вариантов для регулирования скорости и механическими
10
15
20
связями для взаимного соединения питающих и отводящих валиков и установки частоты вращения последних (патент ФРГ № 2754785, кл. о 01 Н 1/12, )978). Известно также устройство для управления рабочими органами прядильной машины, содержащее на 1саждсш ра-, бочем месте электродвигатели питающего валика, расчесывающего валика, прядильной камеры (ротора), отводящего валика и механизма намотки, блока питания и по числу электродвигателей регулируемые преобразователи частоты или напряжения (патент США № 3780513, кл. D01 Н 1/12, 1973). Прядильные машины необходимо выпускать в универсальном исполнении, так как они применяются для перера- .ботки разных натуральных и химических материалов и для выработки разных линейных плотностей пряжи. Дпя этой цели надо приспосабливать обороты рабочих органов, т.е. питающих вали- . ков, расчесывающих валиков, также 25 Kaic и обороты отводящих валиков и наматывающих валиков, при этом после установки оптимального режима последних для определенного материала и линейной плотности пряжи необходимо ,, удерживать обороты этих рабочих органов в установленных границах.
У указанных известных устройств : « отсутствует возможность быстрого и простого изменения режимов скорости вращения рабочих органов прядильных мест для определенного материала и линейной 1гпотности пряжи, трудоемко обслуживание сложных и объемных механических связей в приводном устройстве при переходе из одного режима работы в другой, кроме того, механические связи неудобны из-за больших размеров и массы и являются источником шума.
Задача заключается в создании уст- с ройства для управления прядильной машиной и привода рабочих органов с тем, чтобы простым способом можно было оперативно изменить режим работы машины для материала и линейной плотности пряжи и, чтобы с точки зрения размеров и массы устройство было простым.
В предлагаемом устройстве для управления прядильной машиной к каждо15201564
при этом каждый электродвигатель подсоединен с помощью самостоятельной электрической цепи к электронному ключу в управляющем устройстве, соединенному через преобразователь частоты или средней величины напряжения к регулируемому выпрямителю, который присоединен к блоку питания электрическим током, причем датчики скорости присоединены к блоку входа и выхода управления микропроцессора в управляющем устройстве, который соединен Своими электрическими цепями с отдельными ключами, преобразователями и электрическими цепями регулируемых вьтрямителей.
Достоинством устройства для управления многодвигательным приводом прядильной мащины является то, что можно провести регулирование частоты вращения рабочих органов машины или прядильных мест оперативно, непрерывно, в широком масщтабе и по определенной программе управления рабочим режимом машины при применении микропроцессора и различных способов одиночного, группового или комбинированного приводов мащины. Таким способом можно упростить конструкцию машины и снизить размеры, массу и шум машины, потому что исключены механические передачи в электроприводе, требующие, кроме того, трудоемкую и точ ную тех- нологиюгих изготовления.
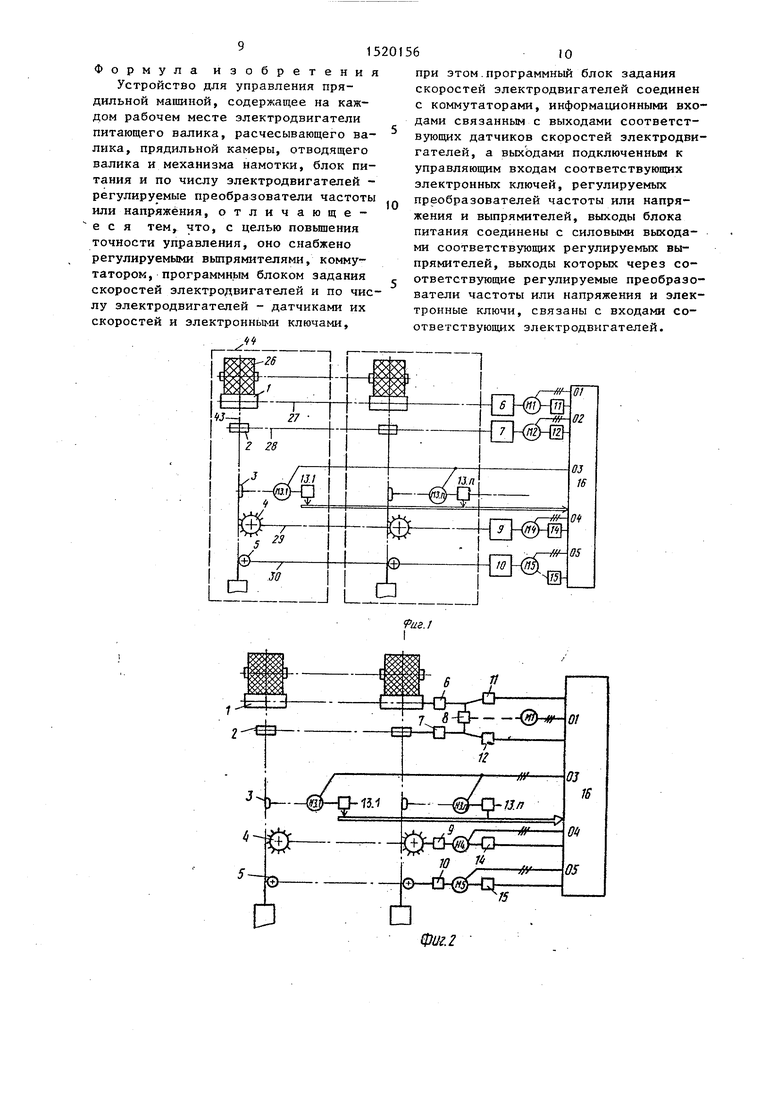
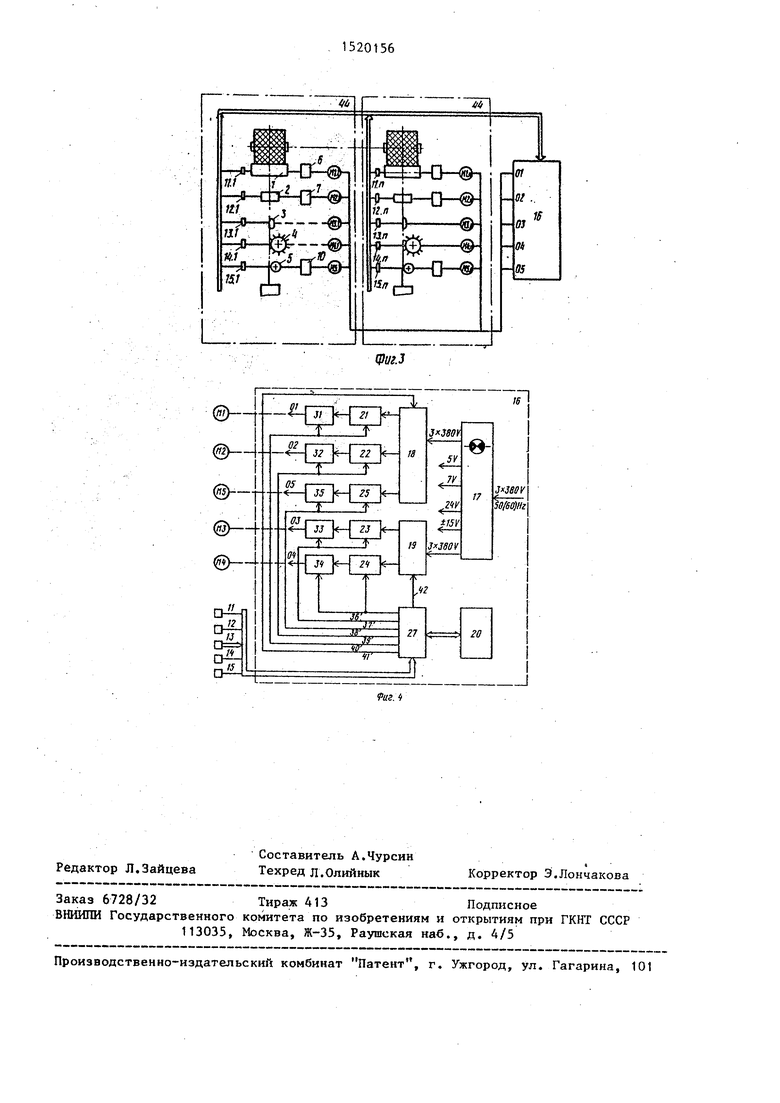
На фиг.1 структурно изображена Функциональная схема прядильной машины, у которой, к каждой группе одинаковых рабочих органов присоединен самостоятельный электродвигатель i на фиг.2 - то же, отводящий валик и наматывающий валик прядильного места на концах валов соединены при помощи механической связи, приводимой в движение при помощи общего электродвигателя; на фиг.З - структурная функциональная схема прядильной мащины с индивидуальным электродвигателем рабочих органов у каждого прядильного местам на фиг.4 - блок-схема устройства для управления рабочими органаMli.
Каждое прядильное место 8 заключа- ет в себя следующие рабочие органы: наматывающий валик 1 для намотки на35
40
50
му рабочему органу прядильного места работанной пряжи 43 на паковку 26,
или группе одинаковых рабочих органов присоединен самостоятельный электродвигатель и датчик скорости.
расположенный на общем валу 27, идущему вдоль машины через передачу 6, подсоединенную к групповому злектрорасположенный на общем валу 27, идущему вдоль машины через передачу 6, подсоединенную к групповому злектродвигателю М 1, к которому присоединен датчик 11 скорости, отводящие валики 2, расположенные также на общем валу 28, который подсоединен передачей 7 к групповому электродвигателю М 2, к которому присоединен датчик | 12 скорости, прядильный ротор 3, подсоединенный к индивидуальному двигателю М 3, к которому также присоединен датчик 13 скорости, расчесывающий валик 4, связанный общим валом 29, например, при помощи ремня через передачу 9 с групповым электродвига
рабочих органов или электродвигателей Ml - М 5 и их взаимного согласования для разньк рабочих режимов по перерабатьтанию сырья и выработки пряжи и их поддерживания в определенных границах.
Устройство 16 управления содержит блок 17 питания и защиты, на входе которого имеется напряжение 380 В, частота 50 или 60 Гц, на выходе имеется дополнительное напряжение 380В, частота 50 или 60 Гц и выводы постоянного напряжения 5, 7, 24 ±. 15 В,
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЯДИЛЬНАЯ МАШИНА | 1993 |
|
RU2068890C1 |
| Устройство для оттягивания и наматывания пряжи | 1984 |
|
SU1787917A1 |
| Устройство управления процессом намотки пряжи (его варианты) | 1985 |
|
SU1490175A1 |
| Устройство для роторного пневмомеханического прядения | 1991 |
|
SU1831525A3 |
| Привод бескольцевой прядильной машины | 1972 |
|
SU533297A1 |
| Пневмомеханическая прядильная машина | 1987 |
|
SU1601226A1 |
| Приспособление для подачи волокнистой ленты к расчесывающему валику устройства для бескольцевого прядения | 1984 |
|
SU1509435A1 |
| i .БИБЛИОТЕЧКА | 1973 |
|
SU389672A1 |
| УСТРОЙСТВО ДЛЯ БЕСКОЛЬЦЕВОГО ПРЯДЕНИЯ | 1992 |
|
RU2041980C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПРЕКРАЩЕНИЯ ПОДАЧИ ВОЛОКОН ВО ВРАЩАЮЩУЮСЯ КАМЕРУ ПРЯДИЛЬНОЙ МАШИНЫ | 1968 |
|
SU217243A1 |
Изобретение относится к текстильной промышленности. Цель изобретения - повышение точности управления. Сущность изобретения заключается в изменении скоростных режимов рабочих органов прядильных мест для выбранного материала и линейной плотности пряжи. Для этого к каждому рабочему органу прядильного места присоединен с одной стороны самостоятельный электродвигатель, связанный с управляющим устройством, с электронным ключом и преобразователем частоты и регулируемым выпрямителем, с другой стороны - датчик скорости, связанный с блоком входа и выхода управления микропроцессора, который соединен с указанными ключами, преобразователями и регулируемыми выпрямителями. 4 ил.
телем М 4, к которому также присоеди- 5 кроме того, могут быть и другие но20
30
иен датчик 14 скорости, питающие валики 5, соединенные, например, общим валом 30 через передачу 10 с групповым электродвигателем М 5, к которому присоединен датчик 15 скорости. Датчики 11-15 скорости регистрируют скорость или частоту вращения элек- . тррдвигателей М 1 - М 5 и переносят эти данные в управляющее устройство 16, с которым они соединены при помо- 25 щи соответствующей электроцепи. Электродвигатели М 1 - М 5 можно применять как постоянного, так и переменного тока (фиг.1).
Группа наматывающих валиков 1 и группа отводящих валиков 2 соединена валами 27 и 28 при помощи механической связи 8, на которую подсоединен электродвигатель М 1, при этом датчики .Ц и 12 скорости могут быть связаны с валами 27 и 28 (фиг.2). На фиг.3 структурная функциональная с-кема изображает прядильную мапшну с прядильными, местами, рабочие органы которых оснащены индивидуальными электродвигателями М 1 - М 5 и индивидуальными датчиками 11 - 15 скорости. При вариантах расположения прядильных мест на прядильной машине общим у всех является то, что привод отдельных рабочих органов прядильных мест - индивидуально или же в группе - осуществляется индивидуальными электродвигателями М 1 - М 5, к которым присоединены датчики И - 15 скорости для измерения частоты вращения электродвигателей или рабочих органов. Датчики скорости присоединены к устройству 16 управления для управления приводом электродвигателей.
Устройство 16 управления предназначено для непрерывного и оперативного регулирования частоты вращения
35
40
45
50
55
миналы напряжения, предназначенные для других элементов контроля и управления машиной. Устройство 16 управления также содержит регулируемые вьтрямители 18 и 19 с несколькими выходами и присоединенные к блоку 17 питания и преобразователи 21-25 для изменения частоты напряжения питания электродвигателей переменного тока или изменения средней величины напряжения электродвигателей постоян ного тока. Также имеются электронные ключи 31 - 35 т.е. устройства переключения, защиты и сигнализации,- предназначенные для отдельных электродвигателей или электромагнитных муфт привода рабочих органов мащины. Приведенные элементы присоединены к коммутатору (блоку входа и выхода) 27 управления микропроцессора 20, выполняющего функции программного блока задания скоростей электродвигателей.
Каждому индивидуальному электродвигателю Ml - М 5 принадлежит свой ключ 3t - 35, с которым он соединен через свою электрическую цепь 01, 02 03, 04, 05. Ключи 31-35 соединен электрической цепью со своими преобразователями 21-25 изменения часто ты или средней величины напряжения, что зависит от вида примененного электродвигателя - переменного или же постоянного тока. Преобразователи 21 - 25 или несколько преобразователей соединены с регулируемыми выпря- мителями,18 и 19, Три преобразователя 21, 22 и 25 соединены с одним регулируемым выпрямителем 18, а другие два преобразователя 23 и 24 соединены с вторым регулируемьг выпрямителем 19. Оба регулируемые выпрямители 1В и 19 присоединены к бло ку 17 питания электрическим током.
0
0
5
5
0
5
0
5
миналы напряжения, предназначенные для других элементов контроля и управления машиной. Устройство 16 управления также содержит регулируемые вьтрямители 18 и 19 с несколькими выходами и присоединенные к блоку 17 питания и преобразователи 21-25 для изменения частоты напряжения питания электродвигателей переменного тока или изменения средней величины напряжения электродвигателей постоян- ного тока. Также имеются электронные ключи 31 - 35 т.е. устройства переключения, защиты и сигнализации,- предназначенные для отдельных электродвигателей или электромагнитных муфт привода рабочих органов мащины. Приведенные элементы присоединены к коммутатору (блоку входа и выхода) 27 управления микропроцессора 20, выполняющего функции программного блока задания скоростей электродвигателей.
Каждому индивидуальному электродвигателю Ml - М 5 принадлежит свой ключ 3t - 35, с которым он соединен через свою электрическую цепь 01, 02, 03, 04, 05. Ключи 31-35 соединен электрической цепью со своими преобразователями 21-25 изменения частоты или средней величины напряжения, что зависит от вида примененного электродвигателя - переменного или же постоянного тока. Преобразователи 21 - 25 или несколько преобразователей соединены с регулируемыми выпря- мителями,18 и 19, Три преобразовате ля 21, 22 и 25 соединены с одним регулируемым выпрямителем 18, а другие два преобразователя 23 и 24 соединены с вторым регулируемьг выпрямителем 19. Оба регулируемые выпрямители 1В и 19 присоединены к блоку 17 питания электрическим током.
715
Датчики 11-15 скорости присоединены к блоку 27 входа и выхода управлении микропроцессора 20, Блок 27 входа и выхода управления микропроцессора 20 соедилен своими электрическими цепями 36 - 39 с отдельньгми ключами 31 - 35 и преобразователями 21 - 25 и далее электрическими цепями 40 и 41 с регулируемыми вьтря)ителями 18 и 19.
Управление многодвигательным приводом машины осуществляется следующим способом.
Частота вращения рабочих органов регулируется изменением частоты или средней величины постоянного напряжения электродвигателей Ml - М 5 преобразователями 21 - 25. Стабильность частоты вращения всех рабочих органов взаимно обеспечивается при помощи датчиков 11 - 15 и преобразователей 18 и 19 через блок 27 входа и выхода управления 27 микропроцессора 20. В случае массовой запрядки или ликвидации обрьгоов пряжи включение - выключение электродвигателей М 1 - М t осуществляется при помощи ключей 31 - 35 и блоков 27 входа и выхода управления микропроцессора 20 по программе, вложенной в память микропроцессора 20. Торможение электродвигателя М 3 прядильного ротора 3 осуществляется подачей постоянного тока из блока 17 питания. Торможение электродвигателей М 1, М 2и М5 и их ре- - верс в случае обрыва пряжи осуществляется путем изменения полярности постоянного напряжения у двигателей постоянного тока или переключением фаз в обмотке статоров у двигателей переменного тока. При реверсе электродвигателей М 1,М 2 с целью спи- .
жения частоты их вращения, частота преоб разователей 21 и 22 передается через ключи 31 и 32. В случае, когда
электродвигатели М 1 - М 5 установлены на машине для групп соответствую- 1ДИХ рабочих органов (фиг.2) и в устройстве привода наматывающих валиков
1 и отводящих валиков 2 установлена механическая связь В, реверсирование осуществляется при помощи электромагнитных муфт в этой механической связи 8.
Если на машине установлены постоянные соотношения частоты вращения наматывающих валиков 1, отводящих валиков 2, расчесывающих валиков 4 и питающих валиков 5, то частоту вра
6
8
щения соответствую11Ц1х электродвигателей М 1, М 2, М 4, М 5 можно регулировать при помощи одного преобразователя 21 .
Регулирование частоты врардения рабочих органов может осуществляться в виде сравнивания заданной и фактической частот вращения или сравнения
временной длительности импульсов датчиков скорости.
Прядильное место работает следующим образом. Питающие валики 5 подают ленту волокнистого материала расчесывающему валику 4, который расчесывает волокна и передает в ротор З. роторе 3 образуется пряжа, которая отводится при помощи ОТВОДЯ1ЦИХ
валиков 2 и наматывается при помощи наматывающего валика 1 на бобину 26„ Пуск машины или прядильных мест заключается в определенном порядке пуска отдельных рабочих органов. Сначала пускаются роторы 3 и после достижения ими определенных или полных оборотов начинает работу расчесывающий валик 4 и потом, после определенного времени, питающий валик 5. Для запрядки отводящие BajuiKH 2 и. наматывающие валки 1 пускаются в обратном направлении для возврата пряжи в ротор 3 и после осуществления запрядки эти отводящие валики 2 и наматывающие валики 1 включаются в направлении отвода и наматывания пряш-с - нормаль- пьй режим работы. Эти действия выполняются по точно определенной программе работы, вложенной в микропроцессор 20, строго для определенного вида перерабатываемого материала и линейной гшотности пряжи. Ренсим рабочих органов и их самостоятельных электродвигателей М 1 - М 5 управляется командами микропроцессора 20 через блок 27 входа и выхода управления и самостоятельный блок коммутации и преобразователи 21-25 соответствующих отдельных электродвигателей.
Датчики 11-15 скорости передают информацию в блок 27 входа и выхода управления микропроцессора 20, которой по этой информации и вложенной программе управляет деятельностью отдельных электродвигателей М 1 - М 5 через их ключи 31 - 35 и преобразователи 21 25.
Формула изобретения
Устройство для управления прядильной машиной, содержащее на каждом рабочем месте электродвигатели питающего валика, расчесывающего валика, прядильной камеры, отводящего валика и механизма намотки, блок питания и по числу электродвигателей - регулируемые преобразователи частоты или напряжения, отличающееся тем, что, с целью повьппения точности управления, оно снабжено регулируемыми вьшрямителями, коммутатором, программным блоком задания скоростей электродвигателей и по числу электродвигателей - датчиками их скоростей и электронными ключами,
««
. J ,
27
при этом.программный блок задания скоростей электродвигателей соединен с коммутаторами, информационными входами связанным с выходами соответствующих датчиков скоростей электродвигателей, а выходами подключенным к управляющим входам соответствуюгцих электронных ключей, регулируемых преобразователей частоты или напряжения и выпрямителей, выходы блока питания соединены с силовыми выходами соответствующих регулируемых выпрямителей, выходы которых через соответствующие регулируемые преобразователи частоты или напряжения и электронные ключи, связаны с входами соответствующих электродвигателей.
/ }3:л
Фи.2
