Известны устройства для слежения за углом поворота элемента изображения, в которых применяется разделение светового потока от элемента изобрал ения, например, с помощью призмы и последующего сравнения интенсивности этих частей. Общим недостатком таких устройств является то, что они, как правило, анализируют положение точечного элемента изображения, т. е. элемента, имеющего продольный размер, приблизительно равный поперечному. Это исключает применение указанных систем для анализа сложных изображений, имеющих взаимопересечения, так как в точках взаимопересечения направление дальнейшего слежения становится неопределенным и может зависеть от различных случайных причин, например от внешних возмущений.
По сравнению с ранее известными предложенный фотоэлектрический датчик угла поворота линейного элемента изображения обеспечивает разделение светового потока и получение сигнала рассогласования. Это достигается за счет использования в нем двух взаимно перпендикулярно ориентированных поляризаторов и вращающегося анализатора.
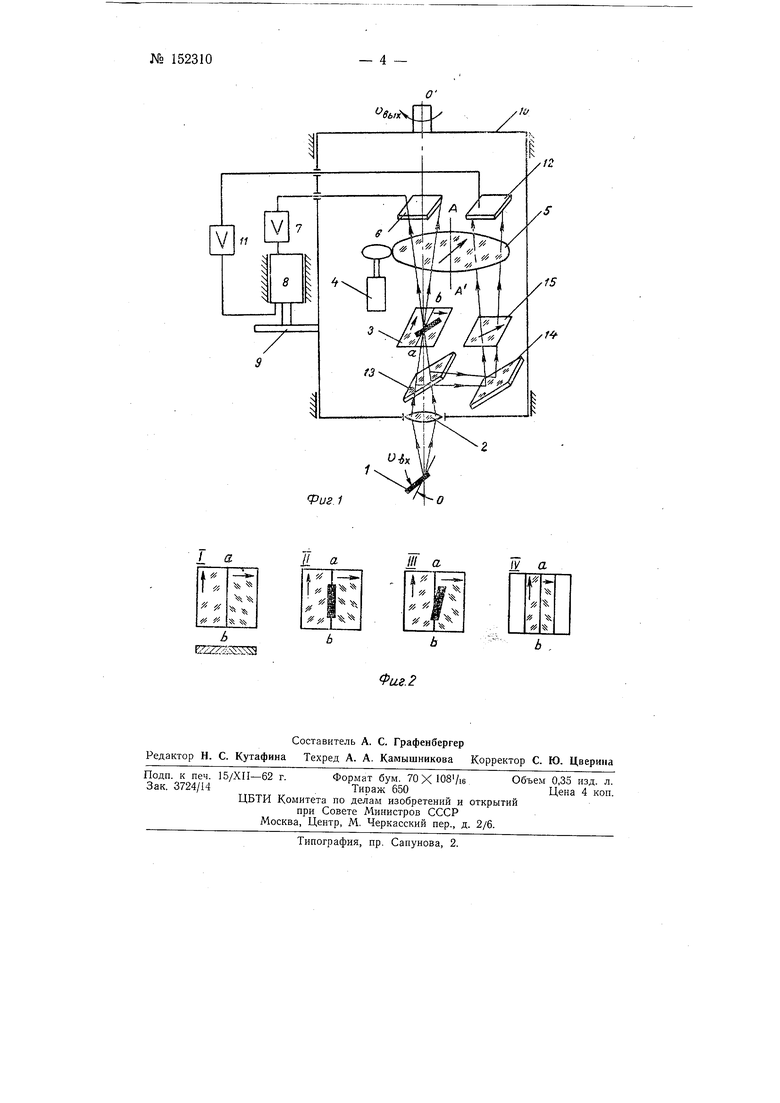
На фиг. 1 изображена предлагаемая система; на фиг. 2 - схема устройства поляризатора для разделения светового потока от элемента изображения и различные положения последнего относительно поляризатора.
Линейный элемент изображения 1, смещенный относительно оси вращения ОО на угол v., проектируется объективом 2 в плоскости поляризатора 3. Поляризатор представляет собой две поляроидные
№ 152310- 2 -
пластинки, совмещенные торцами по линии аЬ так, что плоскости поляризации обеих пластинок перпендикулярны друг другу. На фиг. 1 и фиг. 2(1) стрелками на поляризаторе указано направление плоскостей поляризации пластинок. Пройдя поляризатор, световой пучок от элемента изображения 1 в случае, если последний проектируется на линию раздела аЬ, будет состоять из двух взаимно перпендикулярно поляризованных частей. При этом, если один конец элемента изображения / совпадает с осью вращения ОО, то интенсивности поляризованных световых пучков будут равны только тогда, когда весь элемент изображения спроектируется на поляризатор симметрично относительно линии раздела аЬ, т. е. угол рассогласования равен нулю. В случае несимметричности проекции элемента изображения в плоскости поляризатора относительно линии раздела один из поляризованных пучков будет иметь больщуго интенсивность, чем другой.
Оба поляризованных световых пучка проходят через вращающийся вокруг оси АА с помощью двигателя 4 анализатор 5 и попадают на фотосопротивление 6. При наличии угла рассогласования v. максимумы интенсивности света, попадающего на фотосопротивление 6 после прохождения анализатора 5, будут приходиться на моменты совпадения плоскостей поляризации анализатора 5 и одной из половин поляризатора 5. Зависимость колебаний интенсивности света, падающего на фотосопротивление 6, от времени выражается формулами:
|: + -±-j;(1)
/ц - А COS2 ( ) ,(2)
где: /1 - интенсивность света, поляризованного перпендикулярно линии
раздела аЬ; III - интенсивность света, поляризованного параллельно линии
раздела аЬ А - амплитуда колебаний интенсивности света, поляризованного
параллельно линии раздела аЬ В - амплитуда колебаний интенсивности света, поляризованного
перпендикулярно линии раздела аЬ; Т - период вращения анализатора; t - время.
Так как фотосопротивление 6 реагирует на свет независимо от его поляризации, то фототок будет пропорционален полной интенсивности светового пучка:
J ( г j+5cos( )A + Asin(y /),(3)
где: / - полная интенсивность светового пучка, падающего на фотосопротивление 6
Д Л - В - разность амплитуд колебаний интенсивности пучков, поляризованных параллельно и перпендикулярно линии раздела,а6 поляризатора 3.
Из соотнощения (3) видно, что переменная составляющая суммар/ 2 ного потока Л sin ( - i j имеет частоту, равную удвоенной частоте f
вращения анализатора, и фазу, соответствующую знаку разности А.
Если элемент изображения проектируется на поляризатор 3 несимметрично линии аЬ, то А фЕ и в спектре частот колебаний света, падающего на фотосопротивление 6, присутствует частота 2/. Если же элемент изображения спроектирован на поляризатор 3 симметрично относительно линии ab, то А В и А 0, т. е. переменная составляющая отсутствует. Снятый с фотосопротивления 6 сигнал рассогласования с частотой 2f и фазой, соответствующей знаку угла рассогласования v g., через цепь усилителей 7 поступает на асинхронный двигатель 8, который через редуктор 9 поворачивает фотоэлектронную головку 10 вокруг оси 00 до исчезновения сигнала рассогласования, т. е. до достижения параллельности линии аЬ поляризатора 3 и элемента изображения /.
Питание сетевой обмотки двигателя 8 производится опорным напряжением, снимаемым через усилитель // с дополнительного фотосопротивления 12. Световой поток, падаюи1ий на фотосопротивлепие 12, является частью общего светового потока от элемента изображения /, отводимой с помощью полупрозрачной пластины 13 и зеркала 14. Прежде чем попасть на фотосопротивление 12, этот световой поток поляризуется поляризатором 15 с плоскостью поляризации, повернутой на 45° относительно линии аЬ поляризатора 3, п затем проходит через анализатор 5. Колебания интенсивности света, падающего на фотосопротивление 12, не зависят от ориентации изображения на поляризаторе 3 и всегда имеют частоту 2 /. Фототок с частотой колебаний 2 / подается через усилитель // на сетевую обмотку двигателя 8.
Для возможности слежения по изображению, имеющему взаимопересечения, достаточно на поляризатор 5 поместить диафрагму, как изображено на фиг. 2 (IV). Диафрагма выравнивает интенсивности световых пучков, падающих на поляризатор 3 от линии, пересекающей основную, и эти пучки не дают дополнительного сигнала рассогласования.
Предлагаемая фотоэлектронная поляризационная следящая система может быть применена в различных плоскокопировальных устройствах, а также в качестве датчика для ввода графических данных в электронные вычислительные мащины как непрерывного, так и дискретного действия.
Предмет изобретения
Фотоэлектрический датчик угла поворота линейного элемента изображения с разделением светового потока, принимаемого от элемента изображения, отличающийся тем, что для разделения светового потока и получения сигнала рассогласования в нем используются два взаимно перпендикулярно ориентированных поляризатора и вращающийся анализатор.
- 3 -№ 152310
fus1
lu

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ программного управления фотокопировальными работами | 1961 |
|
SU151173A1 |
| ЭЛЕКТРОННО-ОПТИЧЕСКИЙ ДАТЧИК УГЛА МЕЖДУ ДВУМЯ СВЕТЯЩИМИСЯ ОБЪЕКТАМИ | 1964 |
|
SU164963A1 |
| Эллипсометр | 1988 |
|
SU1695145A1 |
| Автокаллиматор для измерения углов | 1976 |
|
SU555281A1 |
| ПЕРФЛЕКТОМЕТР | 1973 |
|
SU370456A1 |
| ЭЛЛИПСОМЕТР | 2008 |
|
RU2384835C1 |
| СПЕКТРАЛЬНЫЙ ЭЛЛИПСОМЕТР | 2003 |
|
RU2247969C1 |
| МАГНИТООПТИЧЕСКИЙ ДЕФЕКТОСКОП | 1999 |
|
RU2156489C1 |
| Оптическое поляризационное устройство для зондирования атмосферы | 1977 |
|
SU673016A1 |
| Способ считывания информации с магнитного носителя с полосовой доменной структурой и устройство для его осуществления | 1983 |
|
SU1094861A1 |
I/ a
t a.
2iZ ;3S3S3
III a
a
