|СЛ N5 СЛ
о: 
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный индуктивный переключатель | 1988 |
|
SU1499414A1 |
| УСТРОЙСТВО ДЛЯ МАГНИТОТЕРАПИИ И ДАТЧИК НА ПАЛЕЦ ДЛЯ РЕГИСТРАЦИИ КРОВЕНАПОЛНЕНИЯ СОСУДОВ | 1992 |
|
RU2072877C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОБРЫВОВ В ЦЕПИ СВЕТОСИГНАЛЬНЫХ ЛАМП | 1990 |
|
RU2012059C1 |
| Датчик устройства для счета мелких деталей | 1987 |
|
SU1418778A1 |
| ИНДУКТИВНЫЙ ДАТЧИК | 1993 |
|
RU2105970C1 |
| Устройство для определения положения верхней мертвой точки поршня дизеля | 1985 |
|
SU1268995A1 |
| УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ ГАЗОНАСЫЩЕННЫХ СЛОЕВ НА ТИТАНОВЫХ СПЛАВАХ | 2000 |
|
RU2216728C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ДИФФЕРЕНЦИАЛЬНОГО ДАТЧИКА | 2005 |
|
RU2324149C2 |
| ФАЗОГЕНЕРАТОРНЫЙ ДАТЧИК КОНТРОЛЯ ФЕРРИТОВЫХ ОБЪЕКТОВ | 2020 |
|
RU2781802C2 |
Изобретение относится к контрольно-измерительной технике и может быть использовано в средствах очувствления промышленных роботов по расстоянию, а также для точного контроля положения обрабатываемых деталей или узлов механизмов как в нормальных, так и в экстремальных условиях эксплуатации. С целью повышения информативности за счет диагностирования его работоспособности в процессе эксплуатации, в датчик положения, содержащий последовательно включенные генератор 1, индуктивный датчик 2, демодулятор 3, триггер 4 и выходной усилитель 5, введены индуктивный датчик 6, резисторы 7 - 9, конденсаторы 10 - 12, ключи 13, 14 и шины 15, 16 управления. Поочередно подключая RC-цепи к индуктивному датчику 6, можно производить диагностику датчика положения при любом положении контролируемой детали относительно индуктивного датчика 2. 3 ил.
qiue.i
; Изобретение относится к коитрольно- : измерительной технике и может быть ис : пользовано в средствах очувствления I промьштенных роботов по расстоянию, а с также для точного контроля положения : обрабатываемых деталей или узлов ме- j ханизмов как в нормальных, так и в экстремальных условиях эксплуатации. Цель изобретения - повьшение инфор-ю ; мативности датчика за счет диагности- рования его работоспособности в про- I цессе эксплуатации.
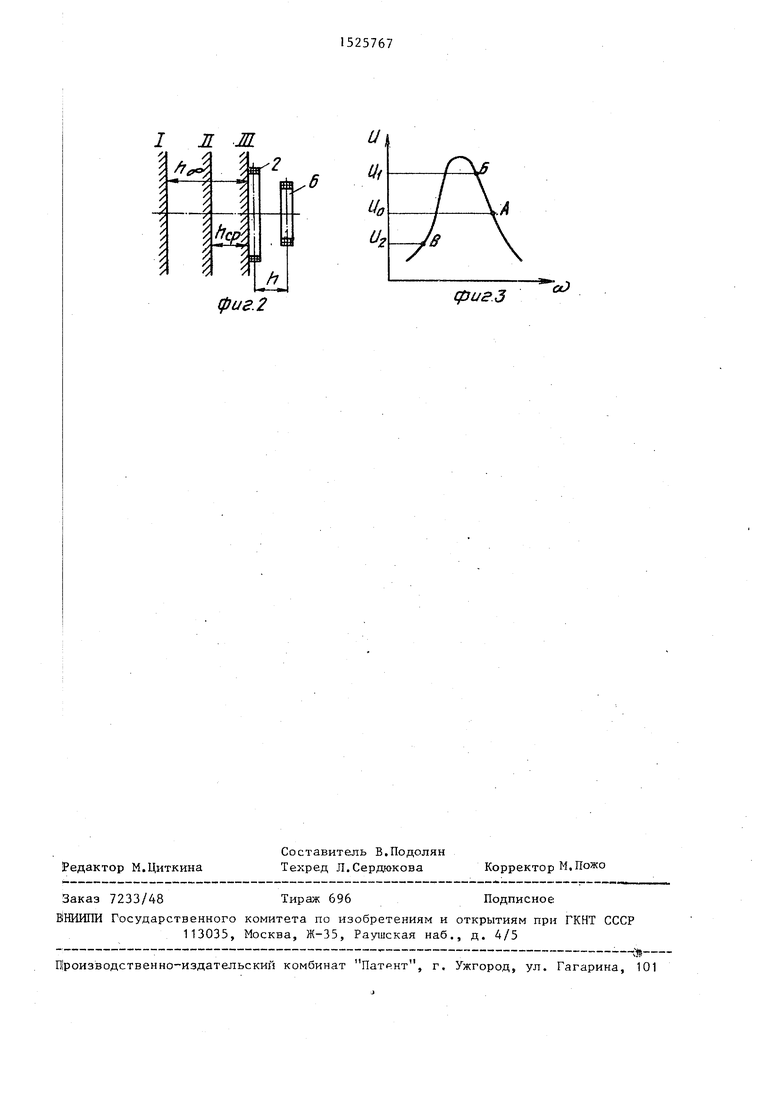
I На фиг.1 приведена блок-схема датчика положения; на фиг ,2 - схема рас; 15 положения дополнительного индуктивного датчика относительно основного; на фиг.З - амплитудно-частотная характеристика (АЧХ) датчика.
Устройство содержит последователь- 20 но включенные генератор 1, индуктивный датчик 2, демодулятор 3, триггер А, выходной усилитель 5, дополнительный индуктивный датчик 6, резисторы 7 - 9, конденсаторы 10 - 12, ключи 13, 14, 25 шины IS, 16 управления. Резистор 7, конденсатор 10, резистор 8, конденсатор 11 и электронный ключ 13, а также резистор 9, конденсатор 12 и электронньш ключ 14 образуют 0 три последовательно соединенные цепи, каждая из которых подключена параллельно датчику.6 а управляющие входы ключей 13, 14 являются входами 15, 16 датчика положения. Датчик 6 индук- 5 тивно связан с датчиком 2 и располо- жен осесимметрично с. ним. Датчик положения работает, следующим образом,
Запитываемый генератором 1 первый дО датчик 2 создает электромагнитное поле, которое при появлении в его
зоне электропроводящей контролируемой детали наводит в последней вихревые токи, которые, в свою очередь, внося 45 активное R и реактивное Хц сопротивления в датчик 2, меняют высокочастотное напряжение генератора 1, которое детектируется демодулятором 3, подается на триггер 4, порог ера- ,Q батывания которого выбирается равным напряжению, соответствующему определенному расстоянию срабатывания (фиг,2). Напряжение с триггера 4 подается на выходной усилитель 5, который обеспечивает необходимое напряжение и мощность для дальнейшего испол113о-. вания в соответствующих исполнительных устройствах. Контурная катушка дат55
чика 6, располагаемая осесимметрично с контурной катушкой датчика 2 (фиг. 2), индуктивно, связанная с ней и нагруженная на сопротивление Z, вносит в катушку датчика 2 комплексное сопротивление Z ц, описываемое выражением
,2
вн
г + JOL + ZH
(1)
где СО несув;ая частота генератора
1;
М - взаимоиндуктивность, определяемая геометрией контурных катушек дат.чиков 2, 6 и расстоянием между ними;
г - активное сопротивление контурной катушки датчика 6;
LQ - индуктивность контурной катушки датчика 6;
Z ц - комплексное сопротивление нагрузки, равное
Z; R + j X,(2)
где R - активное эквивалентное сопротивление нагрузки; X - реактивное эквивалентное сопротивление нагрузки.
Подставив значение Z„ из (2) в (1) и выделив активную и реактивную Х р составляющие, получим:
Га + R
(г + R) + (COLi + X)
(coMf ;
(3)
ВН
иЬг + X г
(гг + R)
+ («Ъ„ ч- Х)
((OM).j,
(4)
Из анализа выражений (3) и (4) следует, что соответствующим выбором электрических и геометрических параметров контурных катущек датчиков 2, 6, а также величин эквивалентных активного и реактивного сопротивлений нагрузки можно обеспечить вносимые датчиком 6 в датчик 2. сопротивления, эквивалентные вносимым сопротивлениям электропроводящей поверхностью.
Значения сопротивления первого резистора 7 и емкости конденсатора 10 обеспечивают вносимое сопротивление в контурную катушку датчика 2, равное вносимому сопротивлению контролируемой детали при ее максимально возможном приближении к торцу детали (фиг,2, поз.Ш), При этом емкостное сопротивлепие --- больше индуктивного oOL , .2
Т.е. рабочая точка А (фиг.З) находится на правом склоне АЧХ контура, состоя- щего из элементов 1,, R., и С(. Электронный ключ 13, управляемый напряжением U|.np, , подаваемым с внешнего устройства, подключает цепь R, С параллельно контурной катушке датчика 6. 10 Значения С выбраны таким образом, что влияние катушки датчика 6 на катушку датчика 2 увеличивается (фиг.З, рабочая точка Б), При подклюконтролируемой детали - при макси
мально приближенной к датчику 2 и расстоянии срабатывания. Это дает возможность, поочередно подключая цепи R, С-г. и R, С к датчику 6, производить диагностику датчика п любом положении контролируемой де тали относительно датчика 2.
Формула изобретен
Датчик положения, содержащий п следовательно вютюченные индуктив
чении R, и С 5 к контурной -катушке дат-15 датчик, генератор, демодулятор и чика 6 (при соответствующем выборе номиналов R и Cj) влияние второй катушки датчика 6 на катушку датчика 2 уменьшается (фиг.З, рабочая точка В). ,
Таким образом, если контролируемая детадь находится вне зоны чувствительности датчика или на расстоянии, больтриггер, отличающийся что, с целью повьш1ения информатив ности за счет диагностирования ег работоспособности в процессе эксп 20 атации, в него введены дополнител ный индуктивный датчик, выполненн с возможностью установки в поле взаимодействия с индуктивным датч ком, первый, второй и третий рези
триггер, отличающийся тем, что, с целью повьш1ения информативности за счет диагностирования его работоспособности в процессе эксплу- 20 атации, в него введены дополнительный индуктивный датчик, выполненный с возможностью установки в поле взаимодействия с индуктивным датчиком, первый, второй и третий резисто;шем hj.p , при подключении R и Cg, обеспечивающих вносимое сопротивление, 25 ры, первые выводы которых подключены равное или большее вносимого сопротив- к первым выводам соответственно перво ления контролируемой детали на рассто- го, второго и третьего конденсаторов, янии срабатывания, происходит сраба- первый и второй ключи, сигнальные тывание датчика. Диагностика работо- входы которых подключены к вторым вы- способности датчика при нахождений 30 водам соответственно второго и тре- контролируемой детали на расстоянии от датчика, меньшем , осуществляется подключением цепочки R, Сэ с помощью электронного ключа 14. При
этом номинальные значения R и С 35 нительного индуктивного датчика под- выбираются так, чтобы обеспечить вели- ключей к вторым выводам резисторов и чину вносимого сопротивления равным или большим разности вносимых сопротивлений при двух разньо: положениях
тьего конденсаторов, первая и вторая шины управления, подключенные к управляющим входам соответственно первого и второго ключа, первый вьшод допол -,
его второй вывод подключен к второму выводу первого конденсатора и выходам ключей.
,
15257676
контролируемой детали - при максимально приближенной к датчику 2 и на расстоянии срабатывания. Это дает возможность, поочередно подключая цепи R, С-г. и R, С к датчику 6, производить диагностику датчика при любом положении контролируемой детали относительно датчика 2.
Формула изобретен ия
Датчик положения, содержащий по- следовательно вютюченные индуктивный
15 датчик, генератор, демодулятор и
триггер, отличающийся тем что, с целью повьш1ения информативности за счет диагностирования его работоспособности в процессе эксплу- 20 атации, в него введены дополнительный индуктивный датчик, выполненный с возможностью установки в поле взаимодействия с индуктивным датчиком, первый, второй и третий резисто;25 ры, первые выводы которых подключены к первым выводам соответственно перво го, второго и третьего конденсаторов, первый и второй ключи, сигнальные входы которых подключены к вторым вы- 30 водам соответственно второго и тре-
ры, первые выводы которых подключены к первым выводам соответственно перво го, второго и третьего конденсаторов, первый и второй ключи, сигнальные входы которых подключены к вторым вы- водам соответственно второго и тре-
тьего конденсаторов, первая и вторая шины управления, подключенные к управляющим входам соответственно первого и второго ключа, первый вьшод допол -,
нительного индуктивного датчика под- ключей к вторым выводам резисторов и
его второй вывод подключен к второму выводу первого конденсатора и выходам ключей.
I Л Ж
фиг. 2
сриг.З
