Изобретение относится к машиностроению и может быть использовано в приводах сельхозмашин и автомобилей ,
Целью изобретения является повышение надежности работы механизма при различных условиях эксплуатации смазки эксцентрикового механизма свободного хода.
На фиг. 1 изображен предлагаемый механизм, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Эксцентриковый механизм свободного хода состоит из двустороннего эксцентрика с кулачками 1 и 3 в средней части ,обоймь1 4 с рабочими поверхностями 5, образованными полуокружностями 6 радиуса R и диаметрально расположенными прямолинейными участками 7, длина которых 1 2(0,01 - 0,05)Н, эксцентриковых втулок 8 и 9 с рабочими поверхностями 10 с вырезом вдоль оси, образующих внутренние выступы 11 и 12.
Механизм работает следующим образом .
При повороте ведущего двустороннего эксцентрика 1 с кулачками 2 и 3 в средней части относительно обоймы 4 против часовой стрелки с определенным угловым ускорением 5, эксцентриковые втулки 8 и 9 за счет сил
инерции поворачиваются на некоторый угол, смещаются в радиальном направлен; и и прижимаются рабочими поверхностями 10 к полуокружностям 6 рабочих поверхностей 5 обоймы 4. Происходит заклинивание (зацепление). При увеличении оборотов обоймы 4 против часовой стрелки рабочие поверхности 5 обоймы 4 поворачивают рабочими поверхностями 10 эксцентриковые втулки 8 и 9 на двустороннем эксцентрике 1 и кулачках 2 и 3 до тех пор, пока внутренние выступы 11 и 12 не входят в контакт друг с другом. Эксцентриковые втулки 8 и 9 устанавливаются концентрично поверхности обоймы 4 с радиальным зазором, и происходит расклинивание (расцепление).
Радиус рабочих поверхностей окружностей R( эксцентриковых втулок В и
9 меньше радиуса рабочих поверхностей окружностей R обоймы 4 на величину радиального зазора, выбираемого по ходовой или широкоходовой посадке. Величина смещения е, центра окружностей радиуса R обоймы выбирается в пределах е (0,01-0,05)Ri Величина наименьшего смещения
центра сжружностей обоймы
0.01R ограничивается тем, что в контакте рабочих поверхностей окружностей 5 обоймы 4 и рабочих поверхностей 8 эксцентриковых втулок 8 и
5 9 снижае тся надежность сцепления из- за возможностей их относительной пробуксовки.
Величина наибольшего смещения центра окружности е д,ацс обоймы ограниQ чивается ргазмером 0,05R из- за значительного угла поворота двустороннего эксцентрика 1 с кулачками 2 и 3 и значительного смещения эксцентриковых втулок 6 и 7, при ко5 тором наступает затрудненное расклинивание (расцепление). Кроме этого при значительном угле поворота эксцентрика I с кулачками 2 и 3 и максимальном е, ,при радиальном смеQ щении эксцентриковых втулок 8 и 9 происходит ударное включение, что увеличивает динамическую нагружен- ность механизма.
I
5Изобретение позволяет повысить надежность и долговечность механизма.
Формула изобретения
0Эксцентриковый механизм свободного хода, содержащий обойму, внутреннюю полумуфту в виде двустороннего эксцентрика и расположенные между ними заклинивающие элементы, о т 5 личающийся тем; что, с целью повьшения надежности, внутренняя рабочая поверхность обоймы в нормальном сечении образована двумя полуокружностями и сопряженными с ними
диаметрально расположенными прямолинейными участками, длина 1 которых определяется из выражения 1 2(0,01- 0,05)R, где R радиус полуокружности.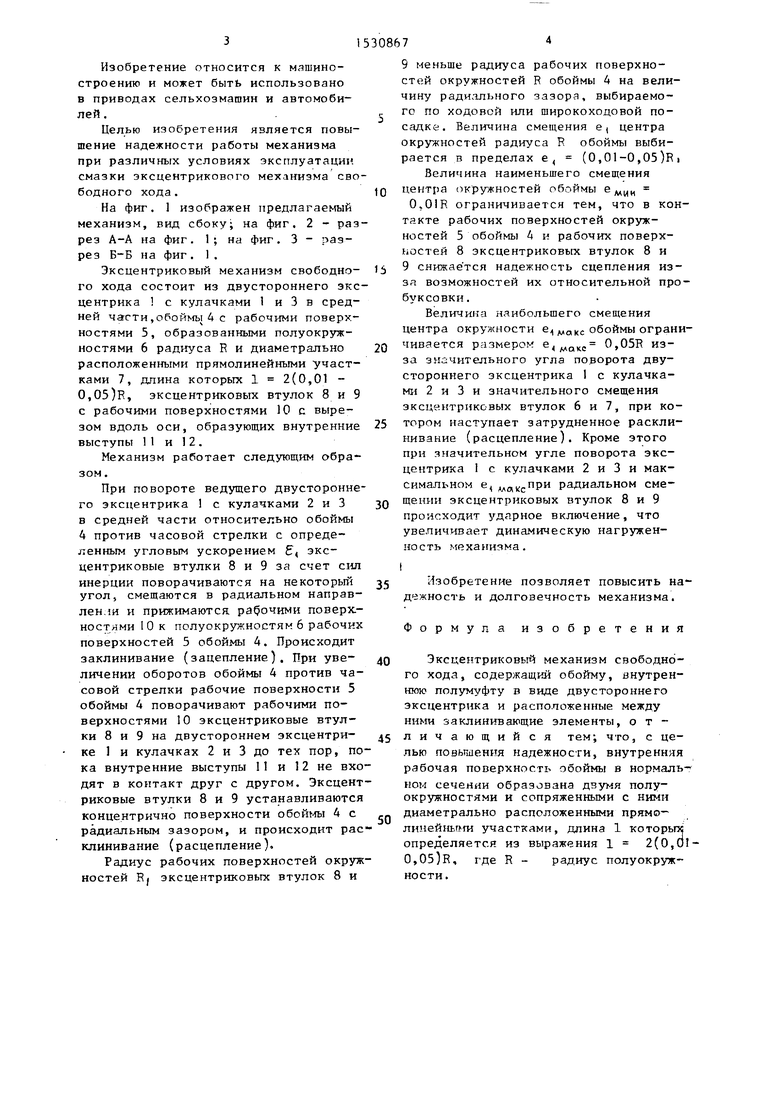
| название | год | авторы | номер документа |
|---|---|---|---|
| МУФТА СВОБОДНОГО ХОДА | 1998 |
|
RU2145009C1 |
| ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ СВОБОДНОГО ХОДА | 2002 |
|
RU2224922C2 |
| Эксцентриковая муфта свободного хода | 1990 |
|
SU1754972A1 |
| Муфта свободного хода | 1979 |
|
SU1038648A1 |
| Муфта свободного хода | 1990 |
|
SU1834999A3 |
| КЛИНОВАЯ МУФТА СВОБОДНОГО ХОДА | 2001 |
|
RU2221941C2 |
| МУФТА СВОБОДНОГО ХОДА | 1998 |
|
RU2143620C1 |
| МУФТА СВОБОДНОГО ХОДА | 2006 |
|
RU2299363C1 |
| КЛИНОВАЯ МУФТА СВОБОДНОГО ХОДА | 2001 |
|
RU2221942C2 |
| Эксцентриковый механизм свободного хода | 1981 |
|
SU1267077A2 |
Изобретение относится к машиностроению и может быть использовано в приводах сельхозмашин и автомобилей. Цель изобретения - повышение надежности работы эксцентрикового механизма свободного хода. Это достигается выполнением внутренней рабочей поверхности 5 обоймы 4 в виде полуокружностей 6 и диаметрально расположенных прямолинейных участков 7, длина которых определяется из выражения L=2/0,01 - 0,05/R, где R - радиус полуокружности. Наличие прямолинейных участков на поверхности обоймы 4 обеспечивает ликвидацию пробуксовки при заклинивании эксцентриковых втулок 8 и 9. 3 ил.
Фиг.1
ы
Ч xTLxV
| Эксцентриковый механизм свободного хода | 1976 |
|
SU1038647A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
