(Л
СП
оо
Ю Ч
сд
о
Изобретение относится к виброизолирующим устройствам, которые могут быть ис- юльзованы, например, в подвесках судо- зых силовых установок.
Цель изобретения - расширение диапазона воспринимаемых нагрузок за счет пространственного корректирования жесткости с различными коэффициентами жесткости по осям.
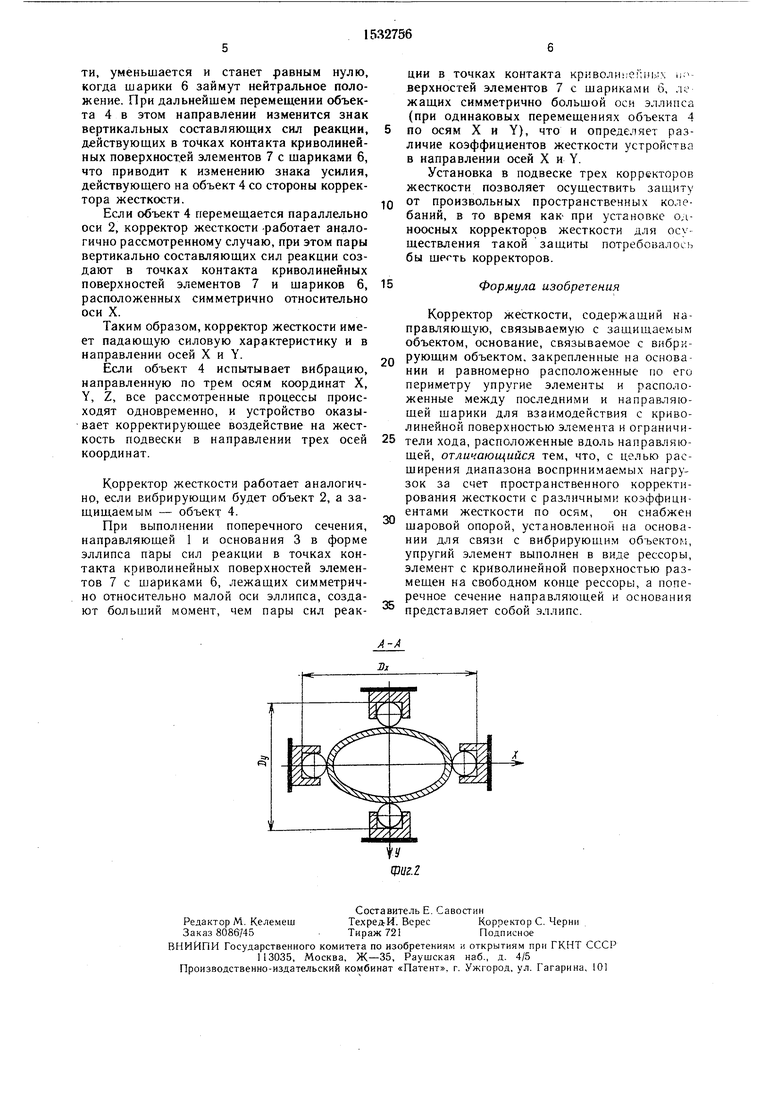
На фиг. 1 изображен корректор жесткости, общий вид; на фиг. 2 - разрез А-А На фиг. 1.
Корректор жесткости содержит направля- дую 1, связываемую с защищаемым объектом 2, основание 3, связываемое с вибрирующим объектом 4, закрепленнные на основании 3 и равномерно расположенные по его периметру упругие элемен- УЫ, выполненные в виде рессоры 5, и рас- |положенные между рессорами 5 и направляющей 1 шарики 6 для взаимодействия с криволинейной поверхностью элемента 7 и ограничители 8 хода, расположенные вдоль Направляющей 1.
Корректор жесткости содержит также Ыаровую опору 9, установленную на основании 3 для связи с вибрирующим объектом 4. Элемент 7 с криволинейной поверхностью размещен на свободном конце рессоры 5, а поперечное сечение напраьляю- щей 1 представляет собой чллипс
Корректор жесткости работает следующим образом.
В момент, когда шарики 6 находятся Ј нейтральном положении, горизонтальные составляющие усилий, передаваемых рессора Ми 5 через элементы 7 с криволинейной Поверхностью и шарики 6 на направляющую 1, взаимно компенсируются, а вертикальные составляющие этих усилий равны нулю. Корректор жесткости при этом находится в состоянии неустойчивого ргвнове- сия. При смещении объекта 4 и связанных с ним элементов 3, 9, 5, 7 в направлении оси Z шарики 6 перекатываются по направляющей 1 также в направлении оси Z, а точки контакта криволинейны : поверхностей элемента 7 с шариками 6 смещаются вверх относительно центров шарикоь 6. При этом в точках контакта криволинейных поверхностей элементов 7 с шариками 6 возникают вертикальные составляющие усилий реакций, передаваемых рессорами 5. Направление этих усилий таково, что они способствуют перемещению объекта 4 в направлении OCH.Z. Чем больше отклонение корректора от положения равновесия, тем больше величина этих усилий. Перекатывание шариков 6 по криволинейной поверхности элементов 7 между ограничителями 8 хода происходит без проскальзывания, так как точки контакта криволинейных поверхностей элементов 7 в пределах угла трения.
Когда нижние ограничители 8 хода достигнут шариков 6, последние вынуждены проскользнуть по направляющей 1 в направлении оси Z. Если теперь объект 4 начнет
перемещаться в противоположном направлении, шарики б перекатываются по направляющей 1 и элементами 7 с криволинейной поверхностью в обратном направлении. При этом величина вертикальных составляю- щих усилий реакции уменьшается и станет равной нулю, когда корректор займет нейтральное положение. При дальнейшем перемещении объекта 4 вниз точки контакта криволинейных поверхностей элементов 7 с шариками 6 перемещаются вниз относитель- но центров шариков, а вертикальные составляющие усилий реакций сменяют знак и направлены вниз, а величина их пропорциональна величине отклонения корректора от положения равновесия. Таким образом, кор- ректор жесткости в направлении оси Z имеет падающую силовую характеристику, т. е. отрицательный коэффициент жесткости.
При вибрации объекта 4 в направлении оси Z шарики 6 перекатываются по направляющей 1 и криволинейным поверхностям элементов 7 между ограничителями 8 хода, не касаясь их, и устройство оказывает корректирующее воздействие на жесткость подвески в направлении оси Z. Проскальзывание шариков по направляющей 1 происходит при перестройке корректора на изменяющуюся нагрузку, когда ограничители 8 хода в циклах колебаний достигают шариков 6.
При смещении объекта 4 в направлении оси X основание 3 поворачивается вокруг шарнира 9 по часовой стрелке. Это вызывает перекатывание шариков 6 корректора жесткости по направляющей 1 и криволинейным поверхностям элементов 7. причем шарики на фиг. 2 справа от оси Y перекатываются по направляющей 1 вниз от нейтрального положения, а шарики слева от оси Y - вверх. При этом в точках контакта криволинейных поверхностей элементов 7 с шарика ми 6 возникают вертикальные составляю- пне сил реакций, направленные в правой половине чертежа вниз, а в левой половищ чертежа - вверх. Момент, создаваемый этими парами сил, стремится повернуть основание 3 по часовой стрелке. На объект 4 через шарнир 9 передает усилие, способствующее перемещению этого
объекта в направлении оси X. Чем больше
смещение этого объекта в направлении оси X, тем больше величина вертикальных составляющих усилий реакции в точках контакта криволинейных поверхностей элементов 7 с шариками 6 и тем большее уилие прикладывается к шарниру 9 в направлении оси X. Если теперь объект 4 начнет перемещаться в обратном направлении, усилие, действующее на него ее стороны корректора жесткоети, уменьшается и станет равным нулю, когда шарики 6 займут нейтральное положение. При дальнейшем перемещении объекта 4 в этом направлении изменится знак вертикальных составляющих сил реакции, действующих в точках контакта криволинейных поверхностей элементов 7 с шариками 6, что приводит к изменению знака усилия действующего на объект 4 со стороны корректора жесткости.
Если объект 4 перемещается параллельно оси 2, корректор жесткости -работает аналогично рассмотренному случаю, при этом пары вертикально составляющих сил реакции создают в точках контакта криволинейных поверхностей элементов 7 и шариков б, расположенных симметрично относительно оси X.
Таким образом, корректор жесткости имеет падающую силовую характеристику и в направлении осей X и Y.
Если объект 4 испытывает вибрацию, направленную по трем осям координат X, Y, Z, все рассмотренные процессы происходят одновременно, и устройство оказывает корректирующее воздействие на жесткость подвески в направлении трех осей координат.
Корректор жесткости работает аналогично, если вибрирующим будет объект 2, а защищаемым - объект 4.
При выполнении поперечного сечения, направляющей 1 и основания 3 в форме эллипса пары сил реакции в точках контакта криволинейных поверхностей элементов 7 с шариками 6, лежащих симметрично относительно малой оси эллипса, создают больший момент, чем пары сил реакции в точках контакта криволинейных ,, верхностей элементов 7 с шариками 6, ло жащих симметрично большой оси эллипса (при одинаковых перемещениях объекта 4
по осям X и Y), что и определяет различие коэффициентов жесткости устройства в направлении осей X и Y.
Установка в подвеске трех корректоров жесткости позволяет осуществить защиту
от произвольных пространственных колебаний, в то время как- при установке одноосных корректоров жесткости для осд ществления такой защиты потребовалось бы шегть корректоров.
15
Формула изобретения
Корректор жесткости, содержащий направляющую, связываемую с защищаемым объектом, основание, связываемое с вибриРУЮШ-ИМ объектом, закрепленные на основании и равномерно расположенные по его периметру упругие элементы и расположенные между последними и направляющей шарики для взаимодействия с криволинейной поверхностью элемента и ограничители хода, расположенные вдоль направляющей, отличающийся тем, что, с целью расширения диапазона воспринимаемых нагрузок за счет пространственного корректирования жесткости с различными коэффициентами жесткости по осям, он снабжен шаровой опорой, установленной на основании для связи с вибрирующим объектом, упругий элемент выполнен в виде рессоры элемент с криволинейной поверхностью размещен на свободном конце рессоры, а поперечное сечение направляющей и основания представляет собой эллипс.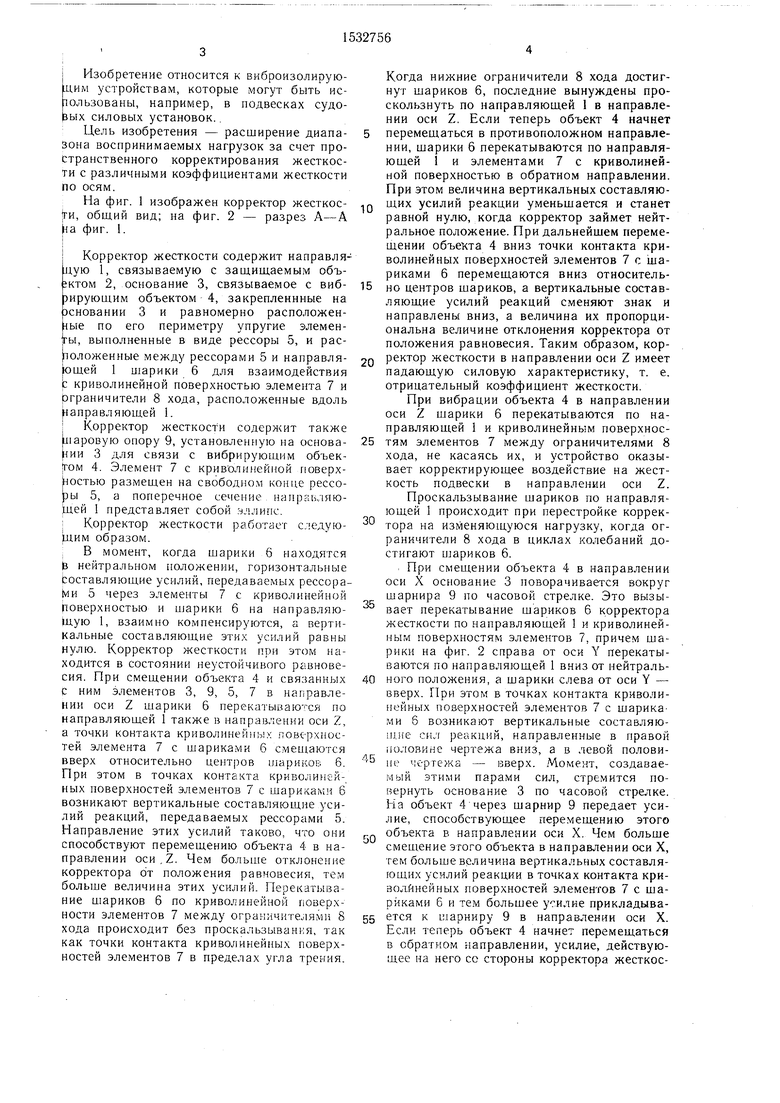
| название | год | авторы | номер документа |
|---|---|---|---|
| Корректор жесткости | 1988 |
|
SU1567821A1 |
| Корректор жесткости | 1981 |
|
SU1059321A1 |
| Шагающий корректор жесткости | 1985 |
|
SU1305471A1 |
| Компенсатор жесткости | 1986 |
|
SU1411216A1 |
| Корректор жесткости | 1984 |
|
SU1293407A1 |
| Корректор жесткости | 1984 |
|
SU1320562A1 |
| Виброизолирующее устройство | 1986 |
|
SU1427110A1 |
| УСТРОЙСТВО ПРИВОДА ВИБРАЦИОННОГО ТИПА, УСТРОЙСТВО ДВУХМЕРНОГО ПРИВОДА, УСТРОЙСТВО КОРРЕКЦИИ РАЗМЫТОСТИ ИЗОБРАЖЕНИЯ, СМЕННЫЙ ОБЪЕКТИВ, УСТРОЙСТВО ЗАХВАТА ИЗОБРАЖЕНИЯ И АВТОМАТИЧЕСКИЙ ПРЕДМЕТНЫЙ СТОЛИК | 2013 |
|
RU2587153C1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| Шагающий компенсатор жесткости | 1983 |
|
SU1097844A1 |
Изобретение относится к виброизолирующим устройствам, которые могут быть использованы, например, в подвесках судовых силовых установок. Целью изобретения является расширение диапазона воспринимаемых нагрузок за счет пространственного корректирования жесткости с различными коэффициентами жесткости по осям. Выполнение в корректоре жесткости шаровой опоры 9, установленной для связи с вибрирующим объектом 4, и поперечного сечения направляющей 1 и основания 3 в форме эллипса обеспечивает при действии нагрузки защиту объекта от произвольных пространственных колебаний с различными коэффициентами жесткости по осям и позволяет осуществить установку в подвеске трех данных корректоров жесткости вместо шести одноосных. 2 ил.
| 0 |
|
SU297771A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Виброзащитные системы с квазинулевой жесткостью /Под ред | |||
| К М | |||
| Рагульскиса, 1, 1986 г., с 9, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
