1 Y
1
с ос
4
Ы
а
.Ј
Изобретение относится к об 1асти тех ничеекот обсгуживания почвижного сое тава в частности к об мсти диа ностиро вания автомоби гей экспрессным методом Не ib июбретенияповышение том
нос г и измерения м юв установки управ
1яемы коне п тем искчючения noipein ностей Hi за отк юнения фактической тра екториг) изижения i ране портного ере итва or за 1аннои
На чертеже изображено устройство общий ви i
С те к i состоит и гевой неподвижной п юны 1ки I которая своими угтами чета новлена на ей юн торите гьные ытчики 2 с жесткой коор шпацией их размещения от носите н.но сторон п юггыдки / и / и правой Ю1ВИЖНОИ и ючга 1ки 2 имеющей с вобо гд че ре мсше ния в поперечном направпнии
игтчика 4 |ишины перемещении и измери тельною кктронного б гока 5 Пр г т.лина по шижнои п кчна IKH 3 превышает
1лин не по шижнои п юта IKH 1 на ве шчин / равную 1 5 шамстрам пятна контакта колеса автомоби ш с п гота -)кс пери мента гьно с га нов те но что 1акое ве:иче tine игины и юны Ш1 явгяется достаточным для прео ю гения сиг инерции и етановге ния равномерного перемещения п гочы г.ки При проезн автомоби тя через с тс HI перчонача гыго правое ко геео пае зжает и по ВИЖНУЮ п ющ ГТ.КУ 3 1Ьн о ие чзгн м сиг у во п она начина1т сремсиа1 сн с не кот рым уемрсчисм и го че pi it пеме пиния пятна минута и п югца У т пр они спич еиг пнсргии юкоя vi tin i i гпаяки ее скорость vc ганав тивас к я i | яннои и пропорцио iaи мои скопом и к т к ния к ) 1сч по ней В . мен ог ы его рост п юта 1ки уемювигся гевое когсео пае зжает на п юта I
Тр к кюрия гвижения опрс к гнсгс напр IB гением пнккснти качения гевого ко
гееа ка гягче гос я го непо шижнои п го гпадке 1 При отк гонении траектории шг жения автомоби гя or направгения прямо линейного шг жения на п ю ветичин на т же вс гичин еме1Титея и п гоша гка 3 так как она связана через мост с правым ко к еом ге с траекторией гвижения neper, ней части автомоби тя Допо жиге гг но п го ша гка 3 месгится на / ю ветичиги и з з несовпагения п госкости качения ко ч с а с н играв гением ею перемещения но п го та 1ке в зависимости от г юв vnanoBKn чправтяемых ко гее автомоби т ч (мог. деи ствием боковых сиг вода) Поперечное смещение н югца 1ки 3 Henoc.pt те г зс нн( конт ротируется гатчпком 4 который по г, к почен к измерите тьном бток 5 Одновременно
1атчики 2 перетаюг информацию в б к к 5 г и рассчитывается траектория движения
гевого ко гееа на i гине /
Раече г оемтгеств гяется егепюгцим обра
SOM
Коор игнаты центра (центра пятна кон такта ко гееа с п гота г.кои) а и н еоответ етвенно равны
а
+ А ) /
10
Ь(А Ч Л /г
(} А,-. А 4. ,-Н,
т ае а и в
5
А,
о
0
5
координаты текущею пгаче ния траектории 1вижения ге вого ко гееа но тоща 1ке
реакция си г oi веса npiixo ягцск с я н i i зое г о ге о а ч г оуоби гя
веч , прихо trti ми i г в к ге о з б г констрч ь гитт. ни и j г
ме гры
Из иокманги га чика 4 «,а, ткн) ю иг х ник т н мсщммч п ю на IHI H вы IK гея CHIHI apah иизчюичг значение ко р тин и в в граектс ч ча к ния т в но KOHL С1 neicHUt ix б НОВОМУ прнпчн НОМУ paiki)TTii ) rut т ене i та золения |( 1C С
Ф(р 411 Ш И Ю I l
j
1 Способ КОНТрО 15 | I) vIlhOiKH
мв гяе viT,ix ко гее т ране п т н ) i p p i 1 ючакнцииси в опре те Hiinn i IOL УС i ночки yi i IB ко гее ве иг тат
ггоперечш го п смещения IHVI рик гьюи п юта ни по i т.иатв1 ом бокових с и з кисте 1О1 тз.кта котееа е п lOiiu1 г MIK прг mr ц го пен транспортом i ,н j.i в oi tuh но щит ч тем ч г е цс i ю новы не ия ioi нос ги т з ере ния путем иск 1ючС| ин г i | п
0 но til н за о кюнсния ф ктикекои р иг- тори изижения тр чпоргнс к ср г IHI от з ганнои при уетановивн еме я шн/i-i гм гране п рг ною ере и тва опре и 1яют теку щ i коо шпаты его траектории 1виж ния г гы уста1 овки управляемых ко кч опре ц т-гют но разюсти показанни меж у ве и чин ж поперечною смещения измерите гьнои г то та дки и снктонением в попер ном на г пав гении траектории движения ijanenipr ною ре icTBu от за ганнои
Q 2 ScTjofi TBo контро 1я у г гон установки управляемых ко тес транспортного i ре ств (одержащес т.ье ей юи змеритетьные п югца 1ки о ага из коте)рых винотнена под зижнои в поперечной п юекости авижения 1ранепортн( г ) средства и кинематически
5 связана е датчиком поперечных переме гцснии сое антенным с з гект роизмерит(ль ным б оком onp° u тения углов ciaHOBKK управ гяем1/1х котес oi шчающееся тем что
5
51534364
с целью повышения точности измеренияний датчика поперечных перемещении и пока
путем исключения not решностей из за откло-заний, полученных при стремлении вели
нения фактической траектории движениячины поперечного смещения фактической
транспортного средства от заданной, др траектории движения трат порт HOI о t ре i
гая площадка выполнена неподвижной ства от заданной, при этом неподвижная
и снабжена силоизмерительными датчикамиплощадка расположена на галении не ме
с жесткой фиксацией их размещения отнонее одного диаметра пятна контакта колес
сительно сторон площадки и измерительнымтранспортного средства с площадкой ог
блоком для определения разности пока а-передней стороны подвижной плоЩа IKH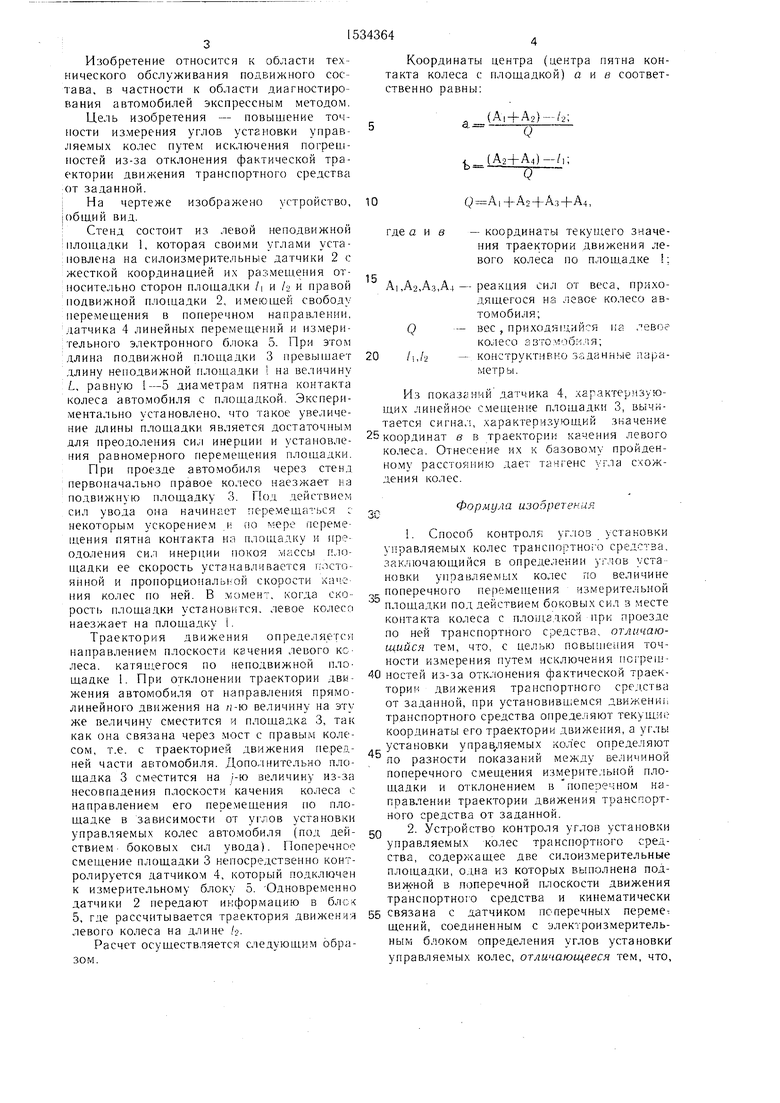
| название | год | авторы | номер документа |
|---|---|---|---|
| Молотилка зерноуборочного комбайна | 1988 |
|
SU1544246A1 |
| Устройство для определения глубины заделки семян | 1988 |
|
SU1535415A1 |
| Трехфазный стабилизированный преобразователь напряжения | 1989 |
|
SU1624425A1 |
| Гидроциклон для классификации и обогащения тонкозернистых материалов | 1988 |
|
SU1544496A1 |
| Способ контроля элементного состава нефтепродуктов и каменноугольных масел | 1987 |
|
SU1534379A1 |
| Самоблокирующийся дифференциал | 1988 |
|
SU1533894A1 |
| Установка для изготовления кирпичных панелей | 1986 |
|
SU1518132A1 |
| Устройство звукоизоляции | 1987 |
|
SU1534500A1 |
| Электропечь сопротивления | 1989 |
|
SU1686293A1 |
| Устройство для очистки сточных вод от взвешенных частиц | 1988 |
|
SU1554937A1 |
Изобретение относится к техническому обслуживанию подвижного состава, в частности к экспресс-диагностированию автомобилей. Цель изобретения - повышение точности измерения путем исключения погрешностей из-за отклонения фактической траектории движения транспортного средства от заданной. Способ измерения углов установки управляемых колес автомобиля по величине перемещения измерительной площадки под действием боковых сил, возникающих в месте контакта колес автомобиля с поверхностью площадки, предусматривает определение текущих координат траектории движения и по разности показаний между величиной поперечного смещения площадки и отклонением в траектории движении транспортного средства определение углов установки колес. Устройство по этому способу состоит из двух площадок: подвижной 3, имеющей свободу перемещения в поперечном направлении и неподвижной 1, которая своими углами установлена на силоизмерительные датчики 2, датчик линейных перемещений 4 и измерительного электронного блока 5. При продвижении транспортного средства по площадкам производится определение координат движения транспортного средства и величины перемещения подвижной площадки в поперечном направлении. По разности этих параметров определяют углы установки управляемых колес. 1 ил.
| Прялка для изготовления крученой нити | 1920 |
|
SU112A1 |
