А-Ало8ернутв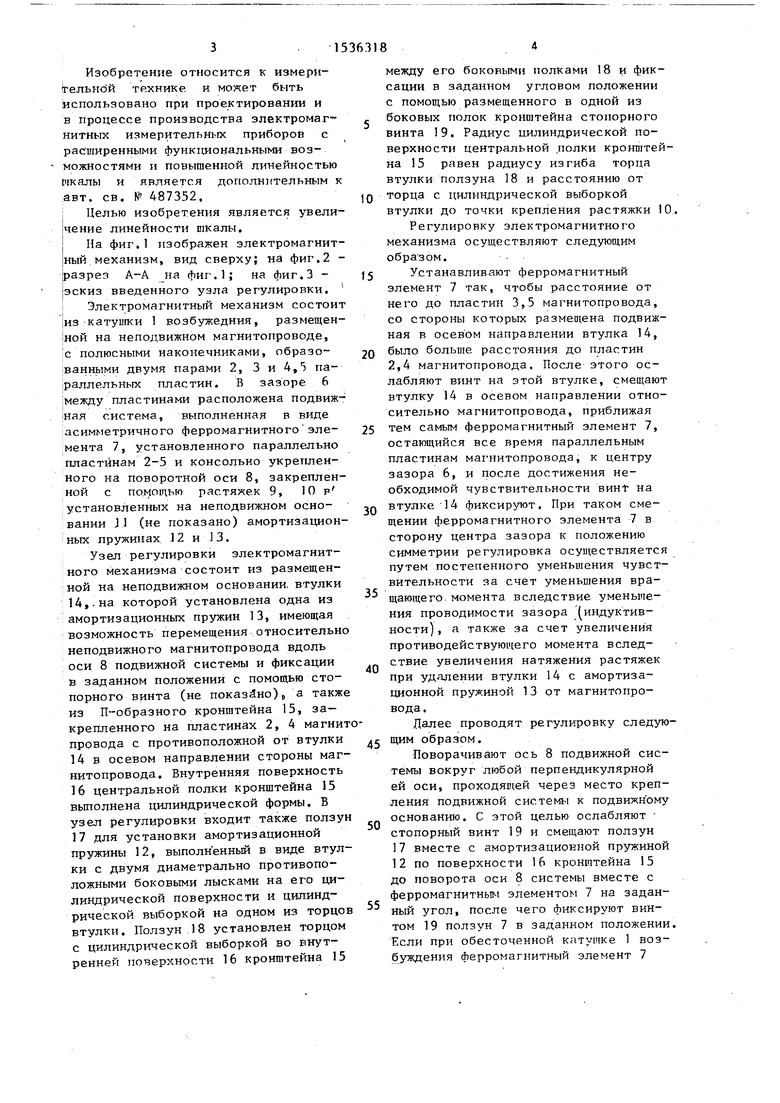
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный прибор | 1981 |
|
SU1046689A1 |
| Электромагнитный прибор | 1981 |
|
SU1002969A1 |
| Электромагнитный измерительный механизм | 1972 |
|
SU487352A1 |
| Электромагнитный ваттметр | 1982 |
|
SU1081549A1 |
| Электромагнитный прибор | 1986 |
|
SU1383208A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| Электромагнитный измерительный механизм | 1986 |
|
SU1354117A1 |
| Электроизмерительный прибор и способ крепления его подвижной части | 1987 |
|
SU1432408A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1991 |
|
RU2046353C1 |
| Подвижная система электромеханическогоизМЕРиТЕльНОгО пРибОРА | 1977 |
|
SU828090A1 |
Изобретение относится к измерительной технике и может быть использовано при проектировании и в процессах производства электромагнитных измерительных приборов с расширенными функциональными возможностями и повышенной линейностью шкалы. Целью изобретения является увеличение линейности шкалы, что достигается путем поворота оси, проходящей через место крепления подвижной системы. Для этого использован П-образный кронштейн 15, на внутренней поверхности которого смонтирован ползун 17. В процессе регулировки используют ползун 17 вместе с амортизационной пружиной 12, перемещая его по поверхности 16 кронштейна 15 до поворота оси 8 подвижной системы вместе с ферромагнитным элементом 7 на заданный угол. После этого ползун 17 фиксируют в заданном положении. 3 ил.
14
фиг-Z
Изобретение относится к измерительной технике и может быть использовано при проектировании и в процессе производства электромагнитных измерительных приборов с расширенными функциональными возможностями и повышенной линейностью чкалы и является дополнительным к авт. св. fr 487352.
Целью изобретения является увели- чение линейности шкалы.
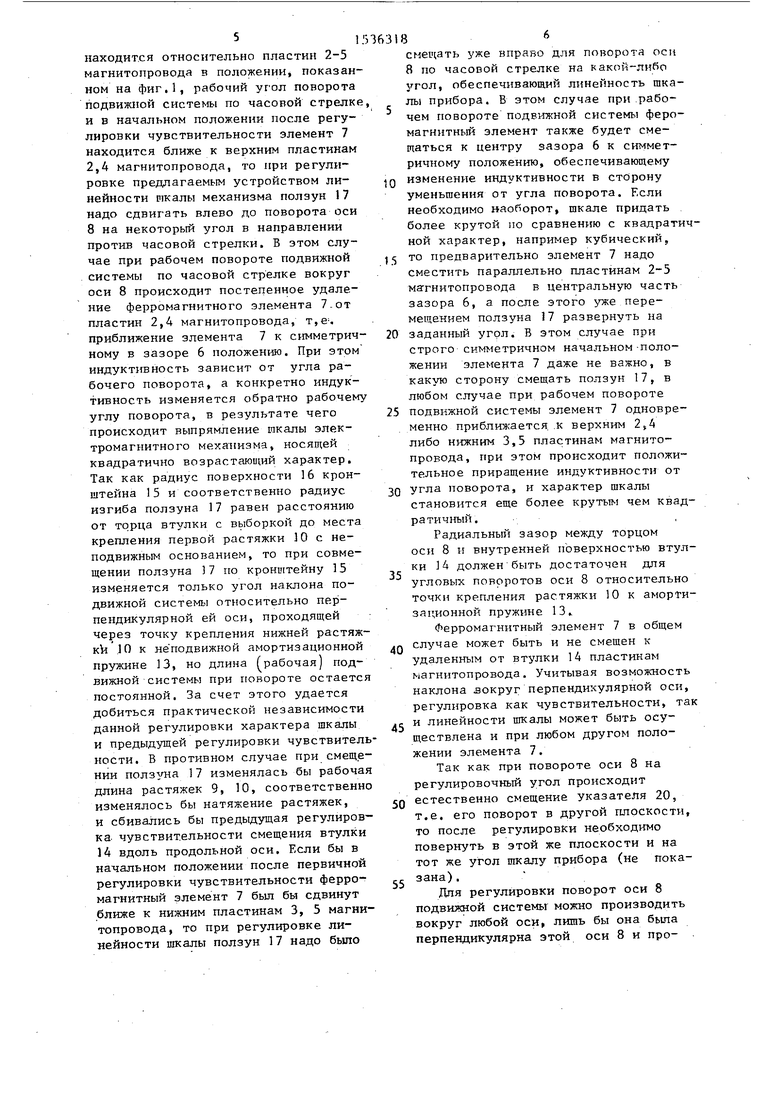
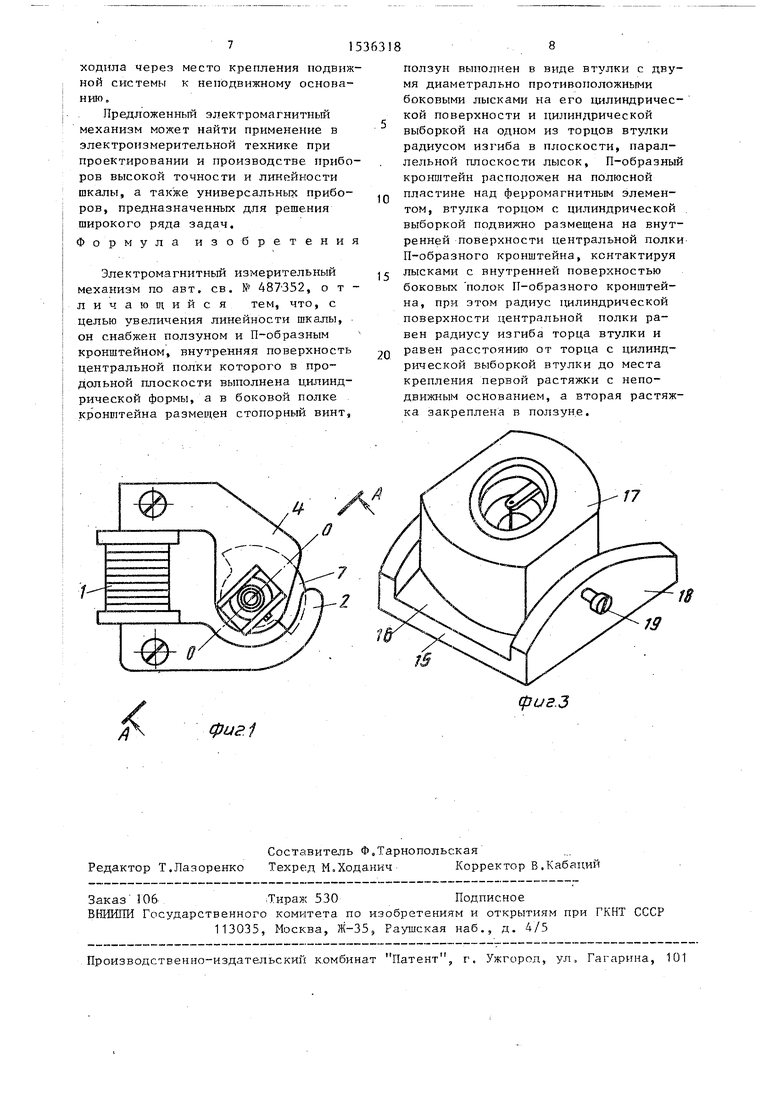
На фиг.1 изображен электромагнитный механизм, вид сверху; на фиг.2 - разрез А-А на фиг . 1; на фиг.З - |Эскиз введенного узла регулировки.
Электромагнитный механизм состоит из катушки 1 возбужедния, размещенной на неподвижном магнитопроводе, с полюсными наконечниками, образованными двумя парами 2, 3 и 4,5 параллельных пластин. В зазоре 6 между пластинами расположена подвижная система, выполненная в виде асимметричного ферромагнитного элемента 7, установленного параллельно пластинам 2-5 и консольно укрепленного на поворотной оси 8, закрепленной с помощью растяжек 9, Юр установленных на неподвижном основании J1 (не показано) амортизационных пружинах 12 и 13.
Узел регулировки электромагнитного механизма состоит из размещенной на неподвижном основании втулки 14,.на которой установлена одна из амортизационных пружин 13, имеющая возможность перемещения относительно неподвижного магнитопровода вдоль оси 8 подвижной системы и фиксации в заданном положении с помощью стопорного винта (не показано), а также из П-образного кронштейна 15, закрепленного на пластинах 2, 4 магнитпровода с противоположной от втулки 14 в осевом направлении стороны магнитопровода. Внутренняя поверхность
16центральной полки кронштейна 15 выполнена цилиндрической формы. В узел регулировки входит также ползун
17для установки амортизационной пружины 12, выполненный в виде втулки с двумя диаметрально противоположными боковыми лысками на его цилиндрической поверхности и цилиндрической выборкой на одном из торцов втулки. Ползун 18 установлен торцом с цилиндрической выборкой во внутренней поверхности 16 кронштейна 15
5
0
5
0
5
0
5
0
5
между его боковыми полками 18 и фиксации в заданном угловом положении с помощью размещенного в одной из боковых полок кронштейна стопорного винта 19. Радиус цилиндрической поверхности центральной полки кронштейна 15 равен радиусу изгиба торца втулки ползуна 18 и расстоянию от торца с цилиндрической выборкой втулки до точки крепления растяжки 10.
Регулировку электромагнитного механизма осуществляют следующим образом.
Устанавливают ферромагнитный элемент 7 так, чтобы расстояние от него до пластин 3,5 магнитопровода, со стороны которых размещена подвижная в осевом направлении втулка 14, было больше расстояния до пластин 2,4 магнитопровода. После этого ослабляют винт на этой втулке, смещают втулку 14 в осевом направлении относительно магнитопровода, приближая тем самым ферромагнитный элемент 7, остающийся все время параллельным пластинам магнитопровода, к центру зазора 6, и после достижения необходимой чувствительности BHHt на втулке 14 фиксируют. При таком смещении ферромагнитного элемента 7 в сторону центра зазора к положению симметрии регулировка осуществляется путем постепенного уменьшения чувствительности за счет уменьшения вращающего момента вследствие уменьшения проводимости зазора индуктивности) , а также за счет увеличения противодействующего момента вследствие увеличения натяжения растяжек при удалении втулки 14 с амортизационной пружиной 13 от магнитопровода.
Далее проводят регулировку следующим образом.
Поворачивают ось 8 подвижной системы вокруг любой перпендикулярной ей оси, проходящей через место крепления подвижной системы к подвижному основанию. С этой целью ослабляют стопорный винт 19 и смещают ползун 17 вместе с амортизационной пружиной 12 по поверхности 16 кронштейна 15 до поворота оси 8 системы вместе с ферромагнитным элементом 7 на заданный угол, после чего фиксируют винтом 19 ползун 7 в заданном положении. Если при обесточенной катушке 1 возбуждения ферромагнитный элемент 7
51
находится относительно пластин 2-5 магнитопровода в положении, показанном на фиг,1, рабочий угол поворота подвижной системы по часовой стрелке и в начальном положении после регулировки чувствительности элемент 7 находится ближе к верхним пластинам 2,4 магнитопровода, то при регулировке предлагаемым устройством ли- нейности шкалы механизма ползун 17 надо сдвигать влево до поворота оси 8 на некоторый угол в направлении против часовой стрелки. В этом случае при рабочем повороте подвижной системы по часовой стрелке вокруг оси 8 происходит постепенное удаление ферромагнитного элемента 7 от пластин 2,4 магнитопровода, т,е. приближение элемента 7 к симметрич- ному в зазоре 6 положению. При этом индуктивность зависит от угла рабочего поворота, а конкретно индуктивность изменяется обратно рабочему углу поворота, в результате чего происходит выпрямление шкалы электромагнитного механизма, носящей квадратично возрастающий характер. Так как радиус поверхности 16 кронштейна 15 и соответственно радиус изгиба ползуна 17 равен расстоянию от торца втулки с выборкой до места крепления первой растяжки 10 с неподвижным основанием, то при совмещении ползуна 17 по кронштейну 15 изменяется только угол наклона подвижной системы относительно перпендикулярной ей оси, проходящей через точку крепления нижней растяжки 10 к неподвижной амортизационной пружине 13, но длина рабочая) подвижной системы при повороте остается постоянной. За счет этого удается добиться практической независимости данной регулировки характера шкалы и предыдущей регулировки чувствительности. В противном случае при смещении ползуна 17 изменялась бы рабочая длина растяжек 9, 10, соответственно изменялось бы натяжение растяжек, и сбивались бы предыдущая регулировка чувствительности смещения втулки 14 вдоль продольной оси. Если бы в начальном положении после первичной регулировки чувствительности ферро- магнитный элемент 7 был бы сдвинут ближе к нижним пластинам 3, 5 магнитопровода, то при регулировке линейности шкалы ползун 17 надо было
Q 5 0 5 0 0 0
5
86
смещать уже вправо для поворота оси 8 по часовой стрелке на какой-либо угол, обеспечивающий линейность шкалы прибора. В этом случае при рабочем повороте подвижной системы феро- магнитный элемент также будет сметаться к центру зазора 6 к симметричному положению, обеспечивающему изменение индуктивности в сторону уменьшения от угла поворота. Если необходимо наоборот, шкале придать более крутой по сравнению с квадратичной характер, например кубический, то предварительно элемент 7 надо сместить параллельно пластинам 2-5 матнитопровода в центральную часть зазора 6, а после этого уже перемещением ползуна 17 развернуть на заданный угол. В этом случае при строго симметричном начальном положении элемента 7 даже не важно, в какую сторону смещать ползун 17, в любом случае при рабочем повороте подвижной системы элемент 7 одновременно приближается к верхним 2,4 либо нижним 3,5 пластинам магнитопровода, при этом происходит положительное приращение индуктивности от угла поворота, и характер шкалы становится еще более крутым чем квадратичный.
Радиальный зазор между торцом оси 8 и внутренней поверхностью втулки 14 должен быть достаточен для угловых поворотов оси 8 относительно точки крепления растяжки 10 к амортизационной пружине 13.
Ферромагнитный элемент 7 в общем случае может быть и не смещен к удаленным от втулки 14 пластинам магнитопровода. Учитывая возможность наклона вокруг перпендикулярной оси, регулировка как чувствительности, так и линейности шкалы может быть осуществлена и при любом другом положении элемента 7.
Так как при повороте оси 8 на регулировочный угол происходит естественно смещение указателя 20, т.е. его поворот в другой плоскости, то после регулировки необходимо повернуть в этой же плоскости и на тот же угол шкалу прибора (не показана) .
Для регулировки поворот оси 8 подвижной системы можно производить вокруг любой оси, лишь бы она была перпендикулярна этой оси 8 и профиг1
фиг.З
| Электромагнитный измерительный механизм | 1972 |
|
SU487352A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
