нои последовательности, что должно вызы-кратное превышение числа импульсов на
вать увеличение F, и соответствующей задержки импульса переполнения на выходе 56 интегратора. Импульс переполнения будет двигаться слева направо по временной диаграмме (осциллограмме), т. е. будет осуществляться поиск сигнала среди шума. При обнаружении излученного сигнала, когда опорный сигнал станет формироваться от среза принятого сигнала с частотой 56 кГц, увеличение , будет некоторое вревыходе элемента 61 (62) над порогом из восьми импульсов, достаточных для переполнения счетчика 47 с начальным кодом 8, определяет устойчивость устройства к раз- личногофода помехам в принятых сигналах. 20 Например, четыре из шестнадцати сравниваемых фронтов и срезов могут «не оказаться на месте и тем не менее демодулятор выдаст правильный сигнал. Определение знака фазового сдвига начинается с
мя продолжаться, так как фазовый сдвигзадержкой в четыре периода опорного сигсравниваемых сигналов за счет выбора начального кода, устанавливаемого на счетчике 45, такой, что импульса переноса на выходе счетчика 47 не будет. Но, начиная с второго-четвертого среза принятого сигнала, что определяется начальным кодом на счетчике 45, знак фазового сдвига изменится и возрастание I, прекратится. А именно, триггер 48, устанавливаемый в состояние «1, будет пропускать в делитель 32 интегратора суммарную импульсную последовательность, скорость (задержка сигнала в делителе 32, фиг. 3) станет уменьшаться, а передача накопленной ранее положительной скорости (задержки сигнала) из делителя 32 в делитель 35 будет невозможна, так как знак скорости (положительнала после начала его формирования (т. е., первые четыре периода опорного сигнала пропускаются и лишь последующие четыре используются для определения фазового сдвига). Тем самым исключается из сравнения
Зо участок принятого сигнала, где происходит переход с одной частоты на другую и по этой причине сигнал бывает нестабильным по фазе и амплитуде. Это дополнительно повышает эффективность демодулятора (помехоустойчивость, дальнодействие).
35 Четыре значения расстояний Г, , з, 4 вводятся в оперативную память ЭВМ 10 с помощью блока 9 по командам, содержащимся в программе ЭВМ (фиг. 1). ЭВМ вычисляет прямоугольные координаты х, у, z излучателя, компенсируя при этом поный), определяемый состоянием «1 тригге-40 стоянные фазовые погрешности и переменра 36, будет противоположен знаку мгновен-ную погрешность, зависящую от температуры,
ного ускорения (отрицательному), определяв-давления и влажности воздуха. Число опремому состоянием триггера 48 демодулято-деляемых расстояний 4 равно числу коорра (состоянием «1), т. е. на выходе сумма-динат 3 плюс 1 (четвертая координата -
тора 37 по модулю 2 будет уровень 0, за-. текущая скорость звука). Дополнительная
прещающий переключение триггера 38. Такое
блокирование передачи скорости (интегрирования скорости) позволяет избавиться от колебаний кодов скоростей и расстояний при включении устройства или резком изменении направления движения излучателя, т. е. сократить время переходного процесса в момент перерегулирования в системе автоподстройки расстояния по времени и, в конечном счете, повысить точность.
Возможность слежения за одним-единст- венным срезом принятого сигнала (на интервале, где частота 56 кГц) показывает фиг. 6. Действительно, формируя опорный сигнал от среза А, можно получить фазовый сдвиг
функция ЭВМ - контроль правильности работы устройства; значительные отклонения четвертой координаты расшифровываются как сбой.
По вычисленным координатам ЭВМ рас50 считывает параметры движения излучателя и, следовательно, органа человеческого тела, например нижней челюсти. Регистрирующие приборы 11 (графопостроитель, печатающее устройство) отображают полученную в ЭВМ информацию.
55
Формула изобретения
1. Устройство для регистрации движений нижней челюсти человека, содержащее привыходе элемента 61 (62) над порогом из восьми импульсов, достаточных для переполнения счетчика 47 с начальным кодом 8, определяет устойчивость устройства к раз- личногофода помехам в принятых сигналах. 0 Например, четыре из шестнадцати сравниваемых фронтов и срезов могут «не оказаться на месте и тем не менее демодулятор выдаст правильный сигнал. Определение знака фазового сдвига начинается с
нала после начала его формирования (т. е., первые четыре периода опорного сигнала пропускаются и лишь последующие четыре используются для определения фазового сдвига). Тем самым исключается из сравнения
участок принятого сигнала, где происходит переход с одной частоты на другую и по этой причине сигнал бывает нестабильным по фазе и амплитуде. Это дополнительно повышает эффективность демодулятора (помехоустойчивость, дальнодействие).
Четыре значения расстояний Г, , з, 4 вводятся в оперативную память ЭВМ 10 с помощью блока 9 по командам, содержащимся в программе ЭВМ (фиг. 1). ЭВМ вычисляет прямоугольные координаты х, у, z излучателя, компенсируя при этом постоянные фазовые погрешности и перементекущая скорость звука). Дополнительная
функция ЭВМ - контроль правильности работы устройства; значительные отклонения четвертой координаты расшифровываются как сбой.
По вычисленным координатам ЭВМ рассчитывает параметры движения излучателя и, следовательно, органа человеческого тела, например нижней челюсти. Регистрирующие приборы 11 (графопостроитель, печатающее устройство) отображают полученную в ЭВМ информацию.
Формула изобретения
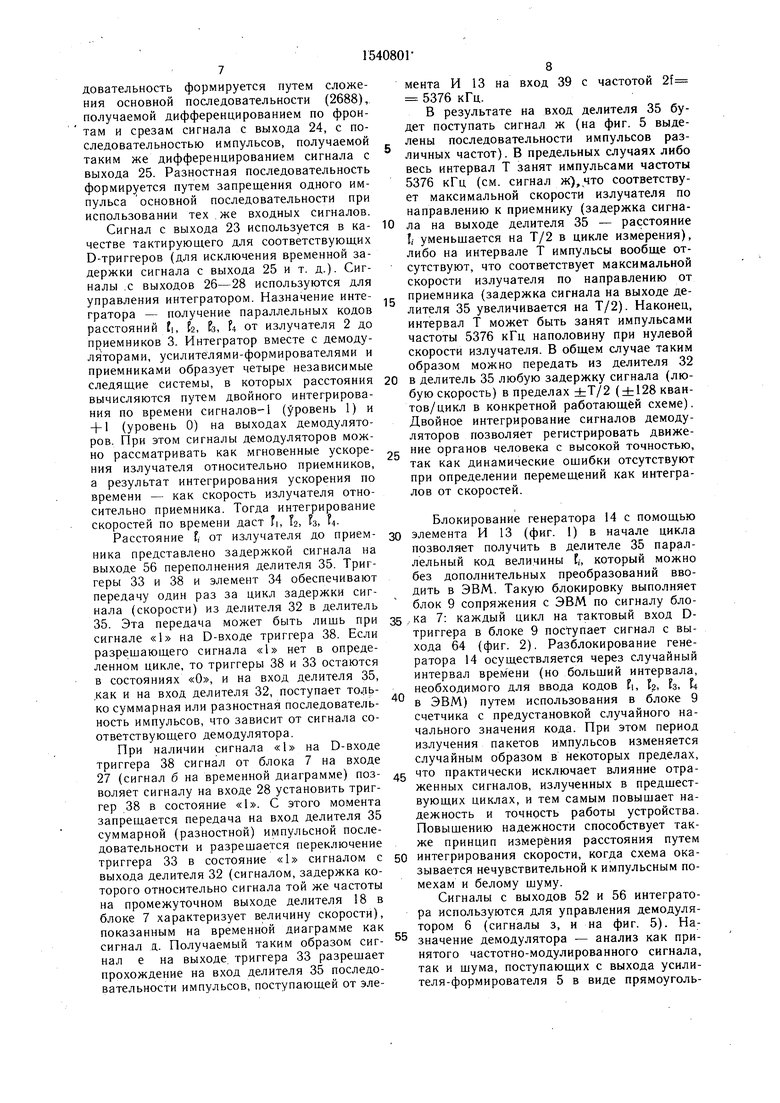
1. Устройство для регистрации движений нижней челюсти человека, содержащее при13
способление для фиксации головы с трехмерным преобразователем сигналов, усилители-формирователи и регистрирующие приборы, отличающееся тем, что, с целью повышения точности регистрации движений g нижней челюсти, в устройство введены четыре демодулятора частотно-модулированных сигналов, интегратор, блок управления, ЭВМ с блоком сопряжения, формирователь корректирующих импульсных после
ка сопряжения с ЭВМ, второй выход которого подключен к второму входу элемента И, выходом соединенного с соответствующим входом интегратора, вторые выходы которого подключены к третьим входам соответствующих демодуляторов
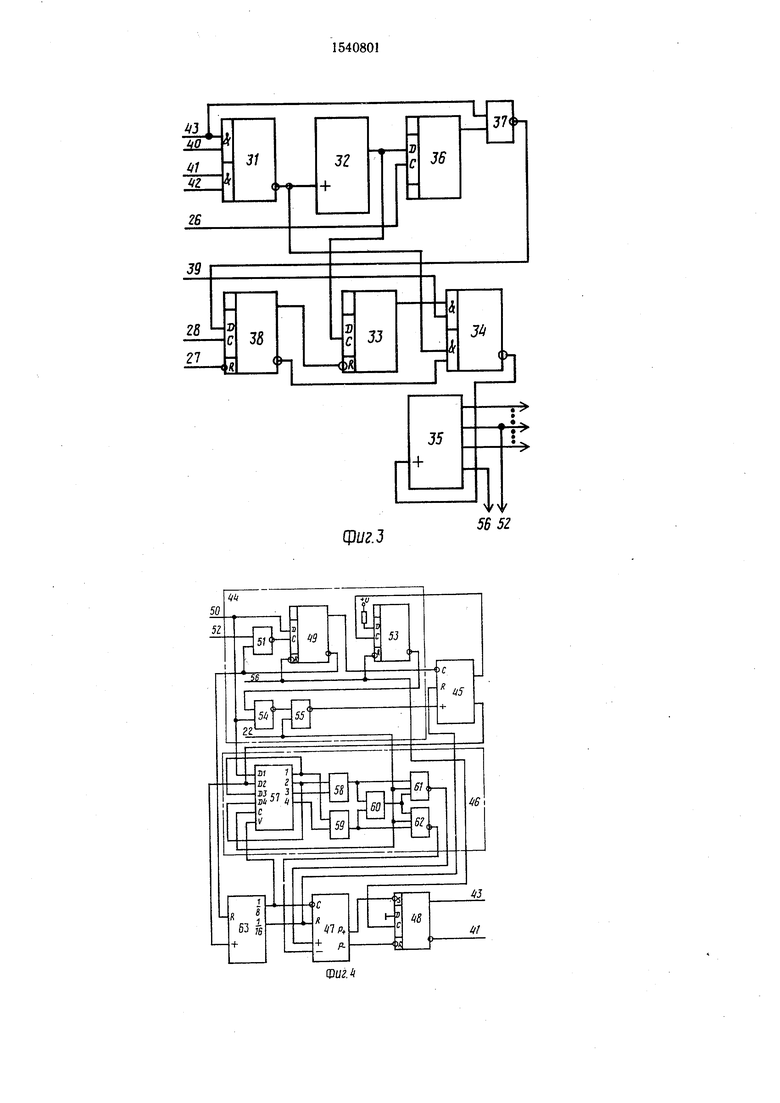
2. Устройство по п 1, отличающееся тем, что демодулятор частотно-модулированных сигналов выполнен в виде последовательно соединенных блока поиска среза принядовательностей, генератор опорных импуль- 10 того сигнала, первого счетчика, блока оп- сов усилитель мощности и элемент И, а ределения знака фазового сдвига, второго
J .. -. . -..счетчика и D-триггера, подключенного ки S-входами к выходам заема и переноса
второго счетчика, а также третьего счетчитрехмерный преобразователь выполнен в виде излучателя ультразвукового сигнала, акустически связанного с четырьмя точечными. ,„„„„„„ приемниками ультразвука, укрепленными на ка, выходы которого соединены с входами экране установленного неподвижно отно- 10 сброса и установки начального значения втог- j.-рого счетчика, счетный вход - с выходом
первого счетчика, а вход сброса - с соответствующим выходом блока поиска среза, другой вход блока определения знака фазо- 20 вого сдвига подключен к входной шине, вход начальной установки блока поиска среза и тактовый вход D-триггера соединены с соответствующим выходом переполнения интегратора вход для счетной последоваUd H tJTUM U У ЛЛЦП и jyci m. и ui л s лл «v.-.,..M,,
опорных импульсов через последовательно тельности импульсов и блока поиска среза
соединенные элементы И, блок управления и тактовый вход блока определения знака
усилитель мощности подключен к входу из-фазового сдвига подключены к соответствуюлучателя ультразвукового сигнала, а второйщему выходу блока управления, вход уставыход блока управления соединен с вторыминовки начального значения первого счетчивходами демодуляторов, третий выход черезка соединен с другим выходом блока поформирователь корректирующих импульс-30 иска среза, а вход сброса - с выходом
ных последовательностей подключен к соот-третьего счетчика, четвертый вход блока поветствуюшему входу интегратора и четвер-иска среза подключен к промежуточному
тый выход соединен с вторым входом бло-выходу соответствующего узла интегратора
Л С, У С I ел . nuvyiv ----сительно приспособления для фиксации головы, причем выходы приемников ультразвука через соответствующие последовательно соединенные усилители-формирователи и демодуляторы подключены к соответствующим входам интегратора, выходы которого через последовательно соединенные блок сопряжения с ЭВМ и ЭВМ подключены к регистрирующим приборам,выход генератора
1540801
14
ка сопряжения с ЭВМ, второй выход которого подключен к второму входу элемента И, выходом соединенного с соответствующим входом интегратора, вторые выходы которого подключены к третьим входам соответствующих демодуляторов
2. Устройство по п 1, отличающееся тем, что демодулятор частотно-модулированных сигналов выполнен в виде последовательно соединенных блока поиска среза принятого сигнала, первого счетчика, блока оп- ределения знака фазового сдвига, второго
и S-входами к выходам заема и переноса
второго счетчика, а также третьего счетчи. ,„„„„„„ ка, выходы которого соединены с входами сброса и установки начального значения втоФ /г.з
5552
a J
5 г
,I
Г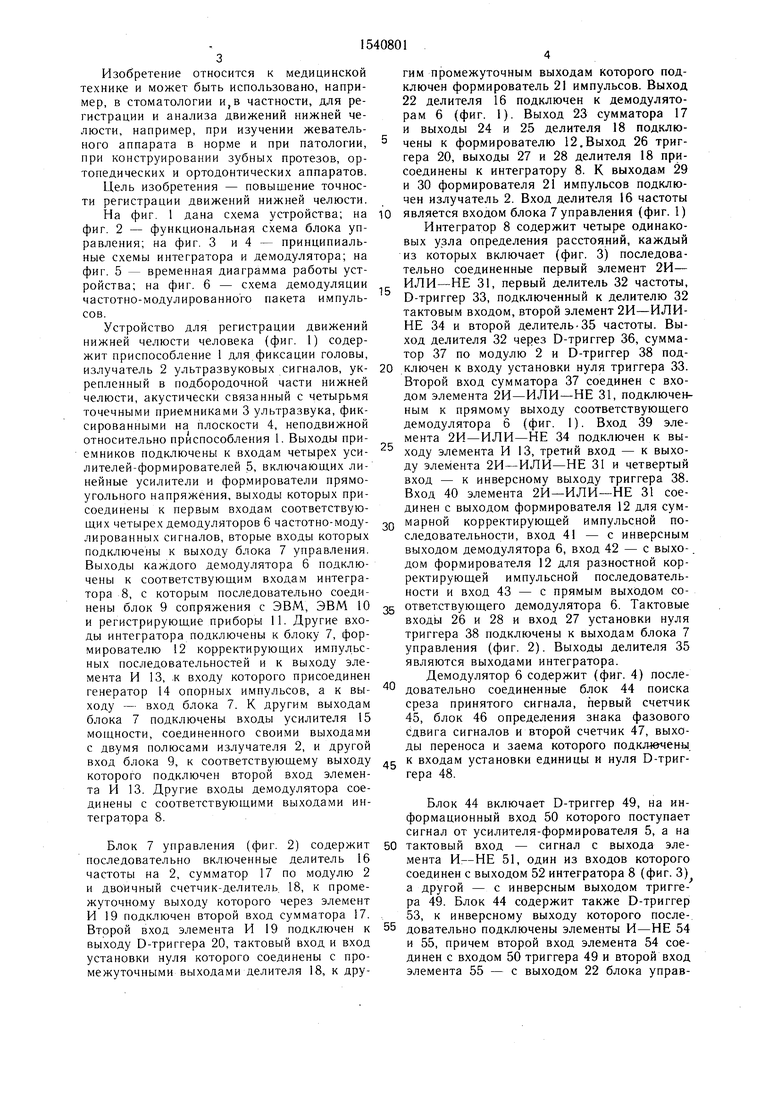



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания информации | 1984 |
|
SU1275492A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1042047A1 |
| Устройство для считывания графической информации | 1972 |
|
SU475638A2 |
| Устройство для считывания графической информации | 1979 |
|
SU960869A2 |
| Устройство для считывания графической информации | 1975 |
|
SU976455A1 |
| Устройство для считывания графической информации | 1979 |
|
SU877584A1 |
| Способ контроля положения объекта относительно опорного луча и устройство для его осуществления | 1987 |
|
SU1674368A1 |
| СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ДИСКРЕТНОЙ ИНФОРМАЦИИ ПО РАДИОКАНАЛАМ ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1994 |
|
RU2079855C1 |
| КВАЗИКОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР СИГНАЛОВ КВАДРАТУРНОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2582331C1 |
| Устройство для считывания графической информации | 1974 |
|
SU669363A2 |


Изобретение относится к медицинской технике и позволяет повысить точность и надежность регистрации движений нижней челюсти в трех направлениях. Сигнал с генератора 14 опорных импульсов поступает через последовательно соединенные элемент И 13, блок 7 управления и усилитель 15 мощности на излучатель 2 ультразвукового сигнала, который укреплен на подбородке. Ультразвуковой сигнал принимают четыре приемника 3, фиксированные на плоскости 4, неподвижной относительно приспособления 1 для фиксации головы. Сигналы с выходов приемников 3 через последовательно соединенные усилители-формирователи 5 и демодуляторы 6 частотно-модулированных сигналов поступают на вход интегратора 8. Сигналы с выхода интегратора 8, пропорциональные расстояниям от излучателя 2 до приемников 3, поступают через блок 9 согласования с ЭВМ на ЭВМ 10 и далее на регистрирующие приборы 11. Блок 7 управляет работой блоков, а также формирователя 12 корректирующих импульсных последовательностей. Сигнал с выхода блока 9 поступает также на второй вход элемента И 13, выход которого соединен с входом интегратора 8. 1 з.п. ф-лы, 6 ил.
2 JIRTIJUIJTJTJ-:
0 1I
ж
цигл
a a a hi(ni
L
фиг. 5
I
в„
i
8
| Гаврилов Е | |||
| И., Щербаков А | |||
| С | |||
| Ортопедическая стоматология | |||
| - М.: Медицина, 1984 | |||
| Устройство для считывания информации | 1984 |
|
SU1275492A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
