Изобретение относится к радиотехнике и может быть использовано в системах телекоммуникации и цифровой передачи данных в составе радиотехнических комплексов.
Наиболее близким по технической сущности и достигаемому результату (прототипом) является демодулятор сигналов двукратной фазовой телеграфии (авторское свидетельство СССР SU 1392630 А1 «Демодулятор сигналов двукратной фазовой телеграфии». Московский авиационный институт им. Серго Орджоникидзе, В.Е. Мартиросов). Достоинства указанной схемы заключаются в повышенной помехоустойчивости при значительных скоростях передачи информации и больших диапазонах начальных частотных расстроек в условиях постоянного значения коэффициента петлевого усиления устройства, что достигается использованием специальной дополнительной цифровой ветви управления (блок 13 прототипа) частотой подстраиваемого генератора. Устройство работает следующим образом. При отсутствии входного сигнала демодулятора на вход блока поиска и фиксации фазового рассогласования (блок 13 прототипа) поступает нулевое напряжение, реверсивный счетчик включен на счет в одном направлении и на выходе ЦАП формируется непрерывно повторяющееся линейно нарастающее напряжение, которое через сумматор модулирует частоту подстраиваемого генератора, осуществляя таким образом поиск входного сигнала демодулятора по частоте.
При появлении сигнала на входе демодулятора на выходе фазовых детекторов появляются сдвинутые по фазе на 90° напряжения биений с линейно изменяющейся частотой. Амплитудные компараторы (блоки 3 и 4 прототипа) совместно с коммутаторами полярности (блоки 5 и 6 прототипа) осуществляют выпрямление напряжений биений. При сближении частот входного и опорного колебаний биения прекращаются, на выходе фазовых детекторов и соответственно коммутатора сигналов (блок 8 прототипа) возникают изменяющиеся по уровню постоянные напряжения. В момент превышения выходного напряжения коммутатора сигналов над опорным уровнем, задаваемым источником опорного напряжения (блок 15 прототипа), осуществляется останов однонаправленного счета реверсивного счетчика, прекращается режим поиска и демодулятор переходит в режим синхронной работы.
В данном устройстве происходит фиксация фазовых рассогласований колебаний на первом и втором фазовых детекторах на уровнях, соответствующих задаваемому напряжению с выхода источника опорного напряжения (блок 15 прототипа).
При изменении фазы на 90°, 180° или 270° входного сигнала демодулятора, находящегося в синхронном режиме работы, напряжения на выходах первого и второго фазовых детекторов сохраняют свое значение, но могут изменять свою полярность. Сигнал на выходе коммутатора сигналов остается неизменным за счет управляющегося воздействия с выходов амплитудных компараторов и с выхода элемента ИСКЛЮЧАЮЩЕЕ ИЛИ (блок 7 прототипа). Таким образом, обеспечивается нечувствительность подстраиваемого генератора к информационной манипуляции фазы входного сигнала демодулятора.
В качестве недостатка схемы прототипа можно отметить неэффективное использование разрядности ЦАП. Младшие разряды ЦАП предназначены для установки дискретных (ненулевых) уровней фазы выходного колебания подстраиваемого генератора относительно фазы входного сигнала. При этом полосы захвата и удержания синхронного режима работы устройства определяются воздействием только старших разрядов ЦАП. Это ограничивает значения полос захвата и удержания синхронного режима работы устройства и снижает точность установа дискретов фазы при задании фиксированного фазового рассогласования в процессе демодуляции входного сигнала.
Вторым существенным недостатком устройства является длительное время вхождения в синхронный режим работы при значительной начальной частотной расстройке, которое определяется фиксированной и ограниченной по значению сверху частотой следования счетных импульсов ЦАП.
Кроме того, у данного устройства точность и стабильность установа значений дискретов фазы снижается при наличии дестабилизирующих факторов, воздействующих на коэффициент петлевого усиления устройства, таких как паразитные изменения амплитуд входного колебания и колебания с выхода подстраиваемого генератора или изменение коэффициентов передач фазовых детекторов (ФД), что характерно при использовании устройства на повышенных рабочих частотах.
Предлагаемая схема квазикогерентного демодулятора сигналов квадратурной фазовой манипуляции обладает следующими достоинствами:
- Все разряды ЦАП используются для синхронизации устройства по частоте. При этом минимальный дискрет напряжения с выхода ЦАП соответствует полному размаху напряжения сигнала с выхода ФД. Это обеспечивает расширение полос захвата и удержания синхронного режима работы устройства при заданной разрядности ЦАП.
- Скорость вхождения в синхронный режим работы зависит от текущего значения частоты биений на выходах ФД и, соответственно, тем выше, чем больше частотное рассогласование. Это обеспечивает минимальное и практически фиксированное значение времени вхождения в синхронный режим работы при любых значениях начальной частотной расстройки.
- Устройство защищено от воздействия дестабилизирующих факторов на коэффициент петлевого усиления, так как производится его установка и стабилизация с помощью блока установки и стабилизации петлевого усиления БУСПУ.
Квазикогерентный демодулятор сигналов квадратурной фазовой манипуляции содержит подстраиваемый генератор 1, фазовращатель 2 на π/2, первый и второй фазовые детекторы 3 и 4, коммутатор 5 полярности сигнала, первый и второй компараторы напряжений 6 и 7, формирователь импульсов 8, первую линию 9 временной задержки, логическую схему «ИСКЛЮЧАЮЩЕЕ ИЛИ» 10, реверсивный счетчик 11, цифроаналоговый преобразователь (ЦАП) 12, первый сумматор 13, первый перемножитель сигналов 14, второй сумматор 15, интегратор 16, первый масштабирующий делитель напряжения 17, блок 18 установки и стабилизации петлевого усиления (БУСПУ) и блок 19 управления фазой (БУФ). Блок БУСПУ содержит первый и второй блоки возведения текущего значения напряжения во вторую степень 20 и 21, третий сумматор 22, блок возведения текущего значения напряжения в 
Устройство работает в двух режимах: режим первоначальной синхронизации и режим синхронной работы.
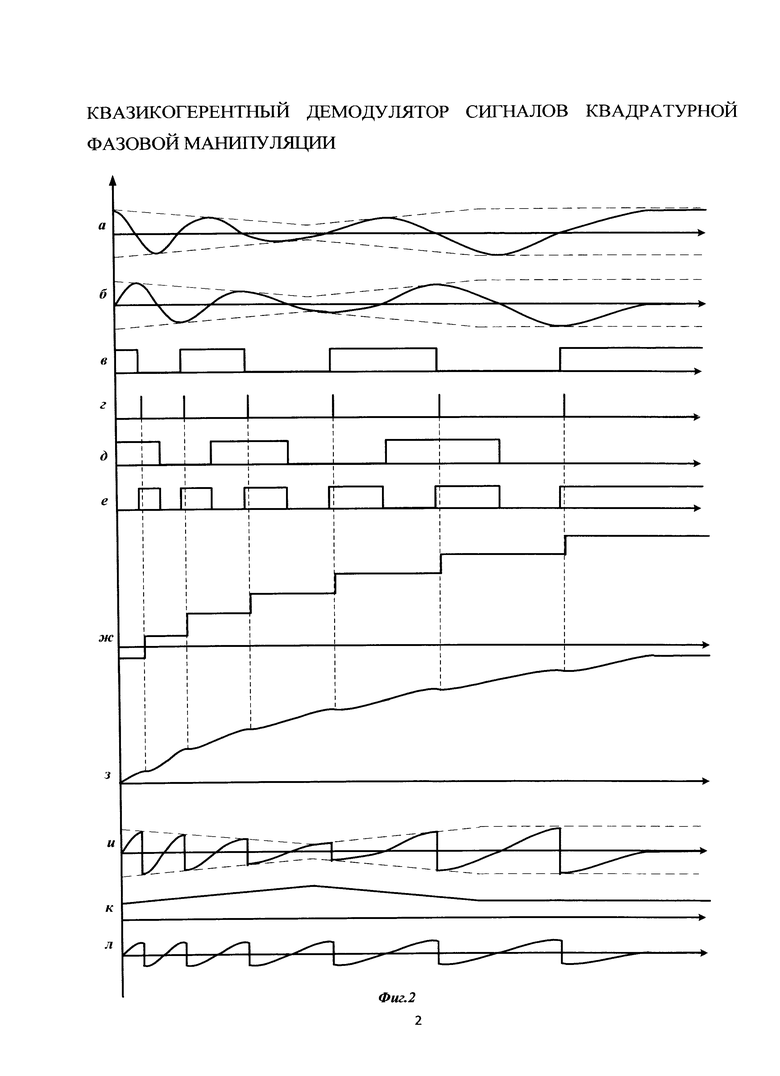
1. В режиме первоначальной синхронизации при включении устройства на выходах первого 3 и второго 4 фазовых детекторов возникают квадратурные составляющие биений с частотой, соответствующей начальной частотной расстройке Δω=ωс-ω0, где ωс - частота колебаний входного сигнала, ω0 - частота колебаний подстраиваемого генератора 1 при исходном значении управляющего напряжения Up (p - регулирующее). На фиг. 2, 3 показаны эпюры напряжений в точках схемы устройства.
Выходной сигнал второго фазового детектора 4 показан на фиг. 2а, фиг. 3а, а выходной сигнал первого фазового детектора 3 на фиг. 2б, фиг. 3б для случаев ωс больше ω0 и ωс меньше ω0 соответственно. Первый 6 и второй 7 компараторы напряжений (КН) из выходных сигналов фазовых детекторов формируют логические сигналы, показанные на фиг. 2в, д и фиг. 3в, д. Фиг. 2в соответствует выходному сигналу второго компаратора 7, фиг. 2д - выходному сигналу первого компаратора 6 при ωс больше ω0; аналогично на фиг. 3в и фиг. 3д для выходных сигналов второго 7 и первого 6 компараторов при ωс меньше ω0. Формирователь импульсов 8 формирует короткие импульсы в моменты времени, соответствующие заднему фронту выходного импульсного сигнала второго компаратора 7. На фиг. 2г и фиг. 3г показаны эти импульсы, прошедшие через первую линию 9 временной задержки. Выходной сигнал логической схемы «ИСКЛЮЧАЮЩЕЕ ИЛИ» 10 при ωс больше ω0 показан на фиг. 2е, а при ωс меньше ω0 - на фиг. 3е. Из эпюр фиг. 2г, е и фиг. 3г, е следует, что код, записанный в реверсивном счетчике 11, и, следовательно, выходное напряжение ЦАП 12 возрастают при ωс больше ω0 и уменьшаются при ωс меньше ω0. Эпюры выходного напряжения ЦАП 12 показаны на фиг. 2ж (при ωс больше ω0) и 3ж (при ωс меньше ω0).
Таким образом, при появлении сигнала на входе системы выходное напряжение ЦАП 12 ступенчато нарастает (при ωс больше ω0) или ступенчато уменьшается (при ωс меньше ω0), в результате чего частота подстраиваемого генератора 1 изменяется в сторону уменьшения текущего частотного рассогласования Δω.
При снижении текущего частотного рассогласования Δω до величины, соответствующей полосе захвата аналоговой ветви управления частотой ПГ, включающей в себя первый фазовый детектор 3, коммутатор полярности сигнала 5, первый перемножитель сигналов 14, второй сумматор 15, интегратор 16 и первый сумматор 13 происходит установление синхронного режима работы модулятора.
Выходной сигнал коммутатора 5 полярности сигнала для случая ωс больше ω0 показан на фиг. 2л, а для случая ωс меньше ω0 показан на фиг. 3л.
Выходной сигнал первого сумматора 13 для случая ωс больше ω0 показан на фиг. 2л, а для случая ωс меньше ω0 показан на фиг. 3з.
Формирование счетных импульсов для реверсивного счетчика на основе колебаний разностной частоты с выхода фазовых детекторов внутри цифровой ветви управления частотой ПГ (включающей блоки 6, 7, 8, 9, 10, 11, 12 и 13) приводит к значительному сокращению времени вхождения в синхронный режим работы квазикогерентного демодулятора. При этом использование всей разрядности реверсивного счетчика в процессе синхронизации устройства по частоте приводит к расширению полос захвата и удержания синхронного режима работы устройства.
Для корректного функционирования устройства и повышения точности и стабильности демодуляции входного сигнала демодулятором необходимо обеспечить согласование локальных дискриминационных характеристик цифровой и аналоговой ветвей управления частотой ПГ. Единичный дискрет ΔUЦАП, формируемого на выходе ЦАП ступенчатого напряжения, должен соответствовать полному размаху напряжения сигнала на выходе коммутатора полярности, равному 2А0. Для этой цели опорное напряжение Uoп цифроаналогового преобразователя используется для формирования единичных аналоговых ступеней напряжения с выхода ЦАП (ΔUЦАП=Uoп/2q, где q - разрядность ЦАП) и для вычисления в первом масштабирующем делителе напряжения 17 нормализованного (требуемого) значения амплитуды сигнала фазового рассогласования с выхода фазового детектора (A0=Uoп/2q+1). Далее с помощью блока установки и стабилизации петлевого усиления 18 реально возникающее значение амплитуды сигнала фазового рассогласования приводится к нормализованному (требуемому) значению (А0=Uоп/2q+1).
Установка и стабилизация требуемого коэффициента петлевого усиления аналоговой ветви управления осуществляется в текущем масштабе времени и происходит следующим образом. Квадратурные составляющие биений с частотой Δω с выходов первого и второго фазовых детекторов 3 и 4 подаются на входы первого и второго блоков возведения текущего значения напряжения во вторую степень 20 и 21 соответственно. На фиг. 2а, б и фиг. 3а, б соответственно для случаев ωс больше ω0 и ωс меньше ω0 показаны сигналы с выходов фазовых детекторов при изменяющихся амплитудах сигналов на входе устройства и с выхода ПГ или изменяющихся коэффициентах передачи фазовых детекторов. Выходные сигналы блоков 20 и 21 подаются на первый и второй входы второго сумматора 22. Сигнал с выхода второго сумматора 22 поступает на вход блока возведения текущего значения напряжения в 
Если ввести обозначения: Uкос, Uсин - напряжение на выходе второго и первого фазовых детекторов соответственно (кос - косинусное, син -синусное). Ареал - мгновенное текущее значение амплитуды выходного сигнала первого фазового детектора, Uoп - опорное напряжение ЦАП, A0 -номинальное (требуемое) значение амплитуды с выхода первого фазового детектора, kст - коэффициент коррекции значения коэффициента петлевого усиления (ст - стабилизации), e(t) - амплитуда напряжения на выходе коммутатора полярности 5, e*(t) - сигнал на выходе блока 14, то выполняемую в БУСПУ процедуру коррекции значения коэффициента петлевого усиления системы можно описать следующими соотношениями:
1. 
2. A0=Uoп/2q+1.
3. kcт=A0/Ареал.
4. e*(t)=e(t)·kст.
Вследствие изложенного, реализуется сопряжение коэффициентов передачи аналоговой ветви управления частотой ПГ (ее локальная дискриминационная характеристика приведена на фиг. 2л, фиг. 3л) и цифровой ветви управления (ее локальная дискриминационная характеристика приведена на фиг. 2ж, фиг. 3ж). Это обеспечивает «сшивание» и «линеаризацию» (см. эпюры фиг. 2з, фиг. 3з) глобальной дискриминационной характеристики заявляемого устройства, что обеспечивает корректную работу демодулятора в условиях наличия изменений и флуктуации амплитуд колебаний входного сигнала и сигнала ПГ или при изменении коэффициентов передачи фазовых детекторов, то есть при наличии дестабилизирующих факторов, воздействующих на коэффициент петлевого усиления устройства.
После завершения процесса синхронизации устройство переходит в режим синхронной работы.
2. В режиме синхронной работы устройства осуществляется процесс демодуляции входного колебания, в результате которого получаются оценки α* и β* значений символов переданных информационных последовательностей α и β. Для устранения влияния манипуляция фазы входного сигнала на формируемое в демодуляторе опорное колебание подстраиваемого генератора в первом сумматоре 13 предусмотрен четвертый вход, на который подается первая специальная подставка напряжения, абсолютной величиной равная А0 и манипулированная по полярности во втором перемножителе 25 потоком демодулируемых оценок символов входного сигнала α*=±1. Кроме того, в устройство введен второй сумматор 15, на второй вход которого подается формируемая перемножителями 28 и 29 вторая специальная подставка напряжения, абсолютной величиной равная (√2/2)А0 и манипулированная по полярности потоком символов формируемой в перемножителе 27 вспомогательной последовательности γ=α*·β*=±1. Использование вспомогательной последовательности γ=α*·β*=±1 необходимо для обеспечения корректной работы демодулятора на интервале значений фазовых рассогласований (π/2;3π/2), на котором, вследствие использования в структуре демодулятора коммутатора полярности, происходит инверсия знака сигнала фазового рассогласования в ветви аналогового управления частотой подстраиваемого генератора.
В данном устройстве точки устойчивого равновесия фазового портрета (соответствующие синхронному режиму работы) располагаются с периодом π. Это обусловлено использованием в аналоговой ветви управления частотой ПГ коммутатора полярности и наличием в схеме устройства интегратора. Фазовый портрет системы при положительной и отрицательной полярности первой специальной подставки напряжения показан соответственно на фиг. 4в и фиг. 4г. Фазовый портрет системы при устранении из структуры коммутатора полярности для случаев положительной и отрицательной полярности первой специальной подставки напряжения изображен на фиг. 4а и фиг. 4б соответственно. С помощью первой специальной подставки напряжения в качестве точек устойчивого равновесия системы устанавливаются точки, соответствующие фазовым рассогласованиям между колебанием ПГ и входным колебанием величиной -45°, 135° (точки A1 и A1* на фиг. 4в) либо 45°, 225° (точки А2 и А2* на фиг. 4г).
Путем управления знаком первой специальной подставки напряжения, поступающей на четвертый вход первого сумматора, осуществляется компенсация воздействия на подстраиваемый генератор манипуляции фазы входного колебания устройства на π радиан. Она производится следующим образом: при изменении полярности символа модулирующей последовательности а во входном сигнале демодулятора на выходе второго фазового детектора происходит резкое изменение значения напряжения на равное по абсолютной величине и противоположное по знаку, вследствие чего на выходе ФИ будет сформирован счетный импульс, PC в зависимости от состояния управляющего входа увеличит или уменьшит свое значение на 1 и выходное напряжение ЦАП соответствующим образом изменится на величину единичного дискрета ΔUЦАП. При этом происходит изменение знака первой специальной подставки напряжения, поскольку управляющим воздействием на ее знак является оценка полярности выхода второго фазового детектора 4, получаемая с выхода второго компаратора напряжений 7. За счет этого напряжение на выходе первого сумматора остается на прежнем уровне и обеспечивается нечувствительность подстраиваемого генератора к информационной манипуляции фазы входного сигнала демодулятора. Наличие второй линии задержки необходимо для совмещения моментов времени появления на входах первого сумматора измененных значений выходного напряжения ЦАП и напряжения первой специальной подставки.
Путем управления знаком второй специальной подставки напряжения осуществляется компенсация воздействия на подстраиваемый генератор манипуляции фазы входного колебания устройства на π/2 радиан. При изменении полярности символа модулирующей последовательности β во входном сигнале демодулятора на выходе первого фазового детектора происходит резкое изменение значения напряжения на равное по абсолютной величине и противоположное по знаку, вследствие чего на первом входе второго сумматора также изменяется величина напряжения на противоположное по знаку значение. При этом происходит изменение знака подаваемой на второй вход второго сумматора второй специальной подставки напряжения, поскольку в управляющем воздействии на ее знак присутствует оценка полярности выхода первого фазового детектора 3 получаемая с выхода первого компаратора напряжений 6. За счет этого напряжения на выходах второго и третьего сумматоров остаются на прежних уровнях и обеспечивается нечувствительность подстраиваемого генератора к информационной манипуляции фазы входного сигнала демодулятора.
При этом совокупность бинарных логических сигналов, получаемых с выходов первого и второго компараторов напряжений, отражает все четыре дискрета информационной манипуляции фазы входного сигнала демодулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЛОБАЛЬНО ЛИНЕАРИЗОВАННАЯ СИСТЕМА СИНХРОНИЗАЦИИ | 2014 |
|
RU2554535C1 |
| КВАЗИКОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР СИГНАЛОВ БИНАРНОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2566813C1 |
| СИНТЕЗАТОР ЧАСТОТ | 2015 |
|
RU2595629C1 |
| КВАЗИКОГЕРЕНТНЫЙ МОДУЛЯТОР СИГНАЛОВ КВАДРАТУРНОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2581646C1 |
| КВАЗИКОГЕРЕНТНЫЙ МОДУЛЯТОР СИГНАЛОВ БИНАРНОЙ ФАЗОВОЙ МАНИПУЛЯЦИИ | 2014 |
|
RU2567002C1 |
| Демодулятор сигналов фазовой телеграфии | 1986 |
|
SU1392631A1 |
| Демодулятор сигналов частотной телеграфии | 1987 |
|
SU1497756A1 |
| Демодулятор сигналов частотной телеграфии | 1986 |
|
SU1392627A1 |
| Модулятор сигналов фазовой телеграфии | 1986 |
|
SU1392628A1 |
| Устройство фазовой автоподстройки частоты | 1988 |
|
SU1663768A1 |



Изобретение относится к радиотехнике и может быть использовано в системах телекоммуникации и вой передачи данных в составе радиотехнических комплексов. Технический результат - комплексное (одновременное) улучшение основных параметров квазикогерентного демодулятора, а именно: расширение полос захвата и удержания синхронного режима работы, сокращение времени вхождения в синхронный режим работы, повышение помехоустойчивости при наличии дестабилизирующих факторов, воздействующих на коэффициент петлевого усиления устройства. Устройство содержит подстраиваемый генератор 1, фазовращатель 2 на π/2, первый и второй фазовые детекторы 3 и 4, коммутатор 5 полярности сигнала, первый и второй компараторы напряжений 6 и 7, формирователь импульсов 8, первую линию 9 временной задержки, логическую схему «ИСКЛЮЧАЮЩЕЕ ИЛИ» 10, реверсивный счетчик 11, цифроаналоговый преобразователь (ЦАП) 12, первый сумматор 13, первый перемножитель сигналов 14, второй сумматор 15, интегратор 16, первый масштабирующий делитель напряжения 17, блок 18 установки и стабилизации петлевого усиления (БУСПУ) и блок 19 управления фазой (БУФ). Блок БУСПУ содержит первый и второй блоки возведения текущего значения напряжения во вторую степень 20 и 21, третий сумматор 22, блок возведения текущего значения напряжения в 
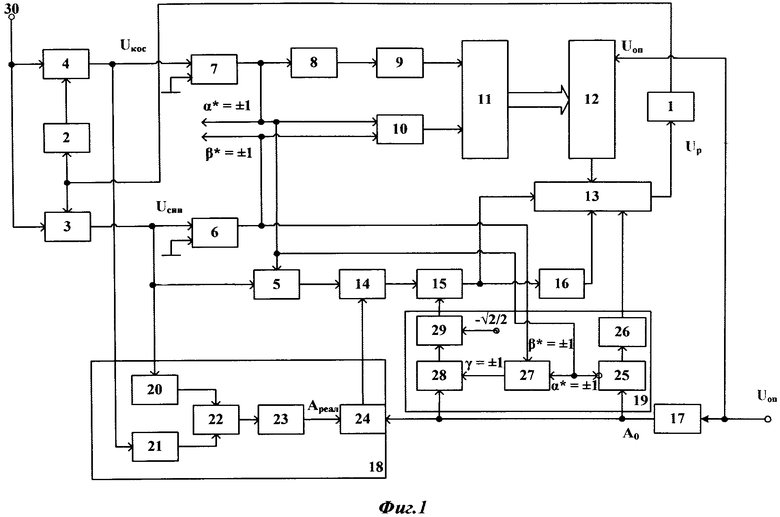
1. Квазикогерентный демодулятор сигналов квадратурной фазовой манипуляции, содержащий последовательно включенные реверсивный счетчик, цифроаналоговый преобразователь, первый сумматор, подстраиваемый генератор, первый фазовый детектор, второй вход которого соединен со входом демодулятора, и коммутатор полярности, а также последовательно включенные фазовращатель на π/2, вход которого соединен с выходом подстраиваемого генератора, и второй фазовый детектор, второй вход которого соединен со входом демодулятора, отличающийся тем, что в устройство введены последовательно соединенные второй компаратор напряжений, первый вход которого подключен к выходу второго фазового детектора, второй вход соединен с общей шиной, а выход является первым выходом демодулятора квадратурной фазовой манипуляции, формирователь импульсов и первую линию временной задержки, выход которой соединен со счетным входом реверсивного счетчика, а также последовательно соединенные первый компаратор напряжений, первый вход которого подключен к выходу первого фазового детектора, второй вход соединен с общей шиной, а выход является вторым выходом демодулятора квадратурной фазовой манипуляции, и логическую схему «исключающее или», второй вход которой соединен с выходом второго компаратора напряжений, а выход подключен к управляющему входу реверсивного счетчика, а также введены последовательно включенные блок установки и стабилизации петлевого усиления (БУСПУ), первый перемножитель сигналов, второй вход которого соединен с выходом коммутатора полярности сигнала, второй сумматор, выход которого, кроме того, подключен ко второму входу первого сумматора, и интегратор, выход которого подключен к третьему входу первого сумматора, а также введены первый масштабирующий делитель напряжения, на вход которого подается опорное напряжение цифроаналогового преобразователя, и блок управления фазой (БУФ), содержащий последовательно соединенные второй перемножитель сигналов, первый вход которого соединен с выходом первого масштабирующего делителя напряжения, а второй вход подключен к выходу второго компаратора напряжений, и вторую линию задержки, выход которой подключен к четвертому входу первого сумматора, а также содержащий последовательно соединенные третий перемножитель сигналов, на входы которого поступают сигналы с выхода первого и второго компараторов напряжений, четвертый перемножитель сигналов, второй вход которого подключен к выходу первого масштабирующего делителя напряжения и пятый перемножитель сигналов, на второй вход которого поступает постоянное напряжение, соответствующее фазовому рассогласованию, равному π/4, и выход которого подключен ко второму входу второго сумматора.
2. Демодулятор по п. 1, отличающийся тем, что блок установки и стабилизации петлевого усиления (БУСПУ) содержит последовательно включенные первый блок возведения текущего значения напряжения во вторую степень, вход которого соединен с выходом первого фазового детектора, третий сумматор, блок возведения текущего значения напряжения в 
| Устройство фазовой автоподстройки частоты | 1988 |
|
SU1663768A1 |
| Устройство дискретной задержки | 1984 |
|
SU1234956A1 |
| US 6909331 B2, 21.06.2005. | |||

