шр.ние наглядности, расширение дидактических и демонстрационных возможностей. Учебный прибор содержит планетарный механизм в виде неподвижного зубчатого колеса, сателлита 15 и водила 13 и устройство 22 отображения изменения вектора скорости и радиуса- вектора исследуемой точки. Привод механизма ручной и включает две пары зубчатых передач, одна из которых 11, 12 служит для вращения водила 13, а вторая зубчатая передача 16, 17 - для вращения вала 19 с кривошипом 18. Устройство 22 отображения включает корпус, жестко связанный с наружной
осью 24, которая шарнирно установлена на сателлите 15 в исследуемой точке, и упругие ленточные указатели, подпружиненные на внутренней оси корпуса устройства 22 и выдвигающиеся из корпуса под углом 90° друг к другу. Один указатель предназначен для демонстрации вектора скорости, а другой для демонстрации радиуса-вектора. Свободный конец второго указателя связан с поводком 29, шарнирно соединенным с кривошипом 18, причем торец поводка 29 демонстрирует мгновенный центр скоростей, 1 з.п, ф-лы, 8 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| УЧЕБНЫЙ ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ ПЛАНЕТАРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧИ С ПОМОЩЬЮ КОДОСКОПА | 2004 |
|
RU2279716C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 1993 |
|
RU2117835C1 |
| Импульсный вариатор скорости | 1984 |
|
SU1237840A1 |
| Устройство для демонстрации планетарного редуктора с помощью кодоскопа | 1991 |
|
SU1781690A1 |
| Учебный прибор по механике | 1991 |
|
SU1770971A1 |
| Механизм перемещения иглы швейной машины | 1989 |
|
SU1656023A1 |
| Учебное пособие по электротехнике | 1986 |
|
SU1410087A1 |
| Смеситель | 1983 |
|
SU1151288A1 |
| УЧЕБНЫЙ ПРИБОР ДЛЯ ДЕМОНСТРАЦИИ РАБОТЫ ПЛОСКИХ МЕХАНИЗМОВ | 1972 |
|
SU436379A1 |
| Бесступенчатая передача | 1986 |
|
SU1364804A1 |

Изобретение относится к учебным демонстрационным приборам по физике и может быть использовано для демонстрации изменения величин и направлений вектора скорости и радиуса-вектора точек тела, совершающего плоское движение, при изучении курса "Теоретическая механика", раздел "Кинематика" в высших и средних учебных заведениях. Цель изобретения - повышение наглядности, расширение дидактических и демонстрационных возможностей. Учебный прибор содержит планетарный механизм в виде неподвижного зубчатого колеса, сателлита 15 и водила 13 и устройство 22 отображения изменения вектора скорости и радиуса вектора исследуемой точки. Привод механизма ручной и включает две пары зубчатых передач, одна из которых 11, 12 служит для вращения водила 13, а вторая зубчатая передача 16, 17 - для вращения вала 19 с кривошипом 18. Устройство 22 отображения включает корпус, жестко связанный с наружной осью, которая шарнирно установлена на сателлите 15 в исследуемой точке, и упругие ленточные указатели, подпружиненные на внутренней оси корпуса устройства 22 и выдвигающиеся из корпуса под углом 90° друг к другу. Один указатель 27 предназначен для демонстрации вектора скорости, а другой - для демонстрации радиуса-вектора. Свободный конец второго указателя связан с поводком 29, шарнирно соединенным с кривошипом 18, причем торец поводка 29 демонстрирует мгновенный центр скоростей. 1 з.п. ф-лы, 7 ил.
Изобретение относится к учебным демонстрационным приборам по физике и может быть использовано для демонстрации изменения, величин и направлений вектора скорости и радиуса-век- тора точек тела, совершающего плоское движение, при изучении курса Теоретическая механика, раздел Кинематика в высших и средних учебных заведениях.
Целью изобретения является повышение наглядности, расширение дидактических и демонстрационных возможностей,,
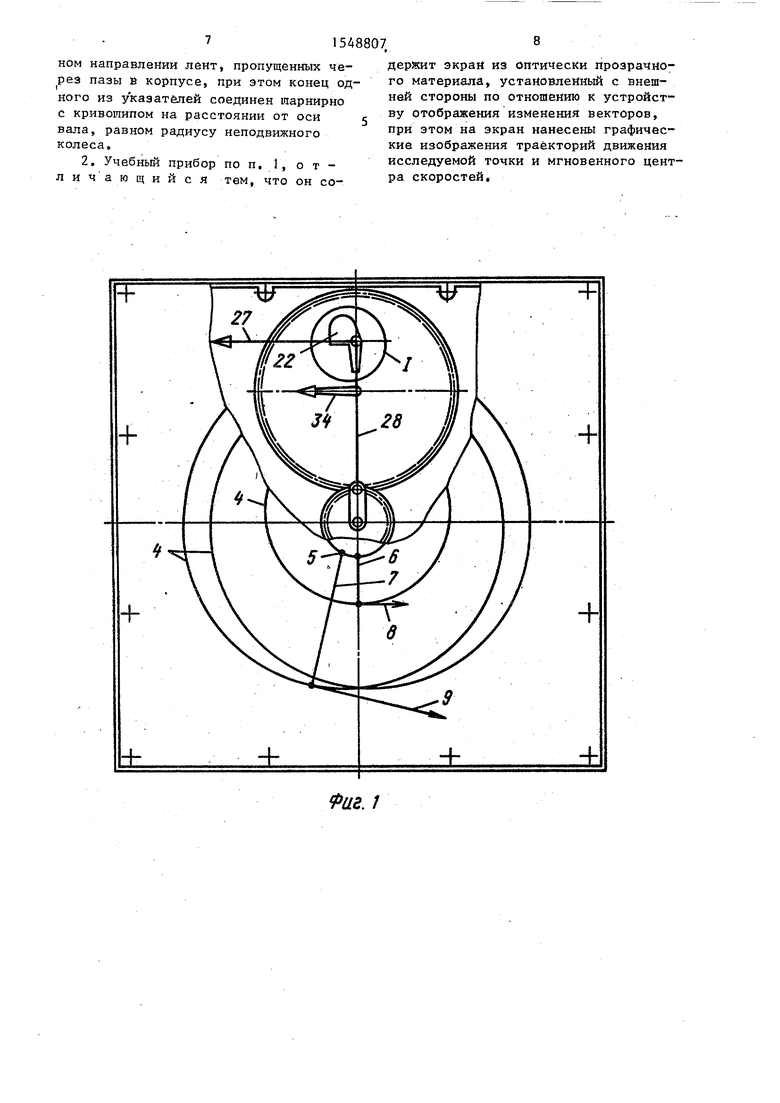
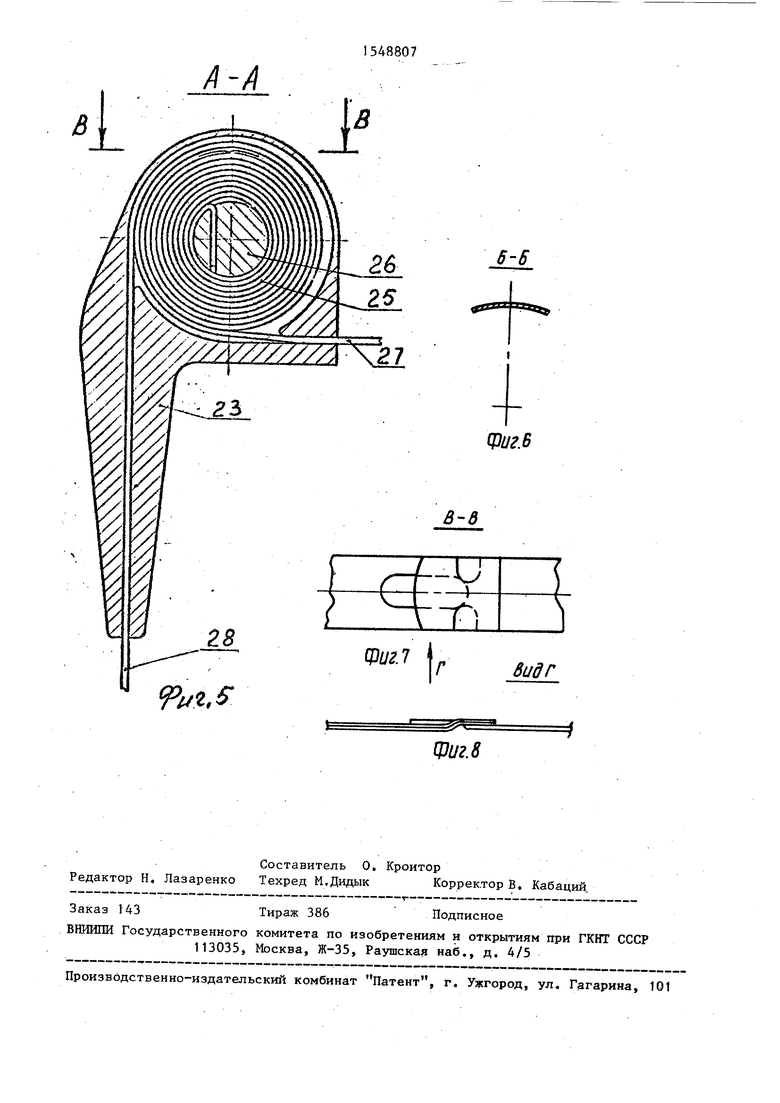
Ка фигв I изображен учебный прибор для демонстрации распределения скоростей точек тела при плоском движении, вид спереди; на - то же, вид сбоку в разрезе; на фиг, 3 - узел I на фиг.1; на фиг, 4 - то же, вид сбоку; на фиг 5 - разрез А-А на фиг.4; на фиг4 6 - разрез Б-Б на фигв4; на фиг,7 - разрез В-В на фиг.5 на фиг, 8 - вид Г на фиг„7.
Учебный прибор для демонстрации распределения скоростей точек тела при плоском движении представляет собой планетарный механизм с внешним зацеплением и включает в свой состав корпус 1 с задней панелью 2 и про- зравным экраном 3 с нанесенными на нем траекторией движения исследуемой точки - эпициклоидой 4, траекторией движения мгновенного центра скоростей - центроидой 5, графическими изображениями промежуточных (случайных положений радиуса - векторами 6 и 7 и в-екторами 8 и 9 скорости исследуемой точки. Экран 3 установлен с лицеп-ой стороны корпуса 1„
5
0
5
0
5
0 I
5
Привод механизма ручной и включает силовую панель 10, две пары зубчатых передач с одинаковым передаточным отношением, одна из которых 11 и 12 служит для вращения водила 13, шарнирно соединенного с осью 14 сателлита 15 „ Вторая зубчатая передача 16 и 17 служит дляiвращения кривошипа 18 через вал 19, с которым жестко связаны ведомое зубчатое колесо 17 и кривошип 1 8„
Неподвижное зубчатое колесо 20 жестко связано с силовой панелью 10 посредством втулки 21.
Устройство 22 отображения изменения вектора скорости и радиуса-вектора включает корпус 23, жестко связанный с наружной осью 24, заводную плоскую пружину 25, внутренний конец которой защемлен на оси 26, жестко закрепленной в корпусе, а наружний конец механически связан с двумя профилированными по длине для придания жесткости упругими ленточными указателями 27 и 28, желобообразного профиля, которые под действием плоской пружины втягиваются вовнутрь корпуса устройства ь вместе накручиваются на пружину, причем указатели имеют приблизительно равную длину и по пазам выходят из корпуса под углом 90° друг
к другу. Один из указателей 27 заканчивается стрелкой и предназначен для демонстрации вектора скорости. Второй указатель 28, предназначенный для демонстрации радиуса-вектора свободным коштом жестко связан с поводком 29, шарнирно соединенным с кривошипом 18, причем торец поводка 29 демонстрирует мгновенный центр скоростей, так как
5
кривошипы 18 и водило 13 параллельн друг другу, а расстояние между осям поводка 29 и вала 19 равно радиусу неподвижного зубчатого колеса 20. Корпус 23 устройства 22 имеет удлиненную направляющую часть, из которой выходит указатель радиуса-вектора 28, находящийся под действием плоской пружины 25, что обеспечивае необходимую ориентацию устройства 2 шарнирно соединенного наружной осью 24 с сателлитом 15 в исследуемой точке, что в свою очередь обеспечивет правильную ориентацию в плоскост вектора скорости 27 и радиуса-вектора 28.
На корпусе 23 содержатся следующие графические изображения: контрастная точка 30, демонстрирующая исследуемую точку сателлита 15, и две риски 31 и 32, демонстрирующие начала вектора скорости и радиуса- вектора соответственно.
Устройство 22 закрывается крышко 33, жестко связанной с осью 24, шарнирно соединенной с сателлитом 15.
Кроме того, прибор снабжен стрелкой 34, закрепленной на оси сателлита 15, указывающей направление вра щения центра сателлита 15,
Прибор работает следующим образо
При вращении рукоятки приводного механизма обе пары его зубчатых передач обеспечивают синхронное вращение параллельных водила 13 и кривошипа 1 При этом сателлит 15 обкатывается по неподвижному зубчатому колесу 20, исследуемая точка 30 (наружная ось 24), описывает изображенную на прозрачном экране 3 эпициклоиду 4, а мгновенный центр скоростей (ось поводка 29) - центроиду 5.
При изменении положения точки 30 наружная ось 24 относительно точки положения оси поводка 29 изменяется расстояние между этими точками, а следовательно, и длина радиуса-вектора. При уменьшении длины радиуса- вектора указатель 28 втягивается вовнутрь устройства 22 под действием усилия плоской пружины 25 и синхронно втягивать за собой указатель 27 вектора скорости, так как оба указателя намотаны на одну и ту же плоскую пружину и соединены с ней в одной точке. При увеличении длины радиуса- сектора указатель 28 вытягивает из
д 5
0
5
0
5
0
5
0
корпуса указатель вектора скорости, преодолевая усилие пружичы 25.
Таким образом, за время полного цикла (3 оборота сателлита 15 вокруг неподвижного колеса при соотношении их диаметров 1/3) длина радиуса-вектора, а следовательно, и вектора скорости меняется от своего максимального значения (фиг.1 и 2) s когда исследуемая точка 30 находится на максимальном расстоянии от мгновенного центра скоростей (проекция оси поводка 29) до своего минимального значения при сближении этих точек.
Устройство 22 обеспечивает не только изменение длины указателя 27 (вектора скорости) и указателя 28 (радку- са-вектора), но и необходимую их ориентацию во время движения, так как указатель радиуса-вектора, находясь в напряженном состоянии, под действием плоской пружины 25 ориентирует корпус 23 устройства 22, а с ним и указатель вектора 27 скорости в нужном направлении в любой точке траектории t Отсутствие провисания указателя вектора скорости обеспечивается упругостью спрофилированной по длине ленты. Формула изобретения i
ном направлении лент, пропущенных че- ез пазы в корпусе, при этом конец одного из указателей соединен иарнирно с кривошипом на расстоянии от оси с вала, равном радиусу неподвижного колеса.
8
держит экран из оптически прозрачного материала, установленный с внешней стороны по отношению к устройству отображения изменения векторов, при этом на экран нанесены графические изображения траекторий движения исследуемой точки и мгновенного центра скоростей.
фиг.З
ФигМ
Фиг. 8
| Демонстрационные приборы по теоретической механике/Под ред„ проф„ Н.В | |||
| Бутенина | |||
| - Л,: Военный инженерный Краснознаменный институт им, А0Ф, Можайского, 1980, с. |
