Изобретение относится к измерительной технике и может быть использовано в океанологии, физике плазмы, аэро- и гидродинамике, например,для исследования стратифицированной жидкости,
Цель изобретения - повышение точности измерений градиента показателя преломления (vn) прозрачных объектов.
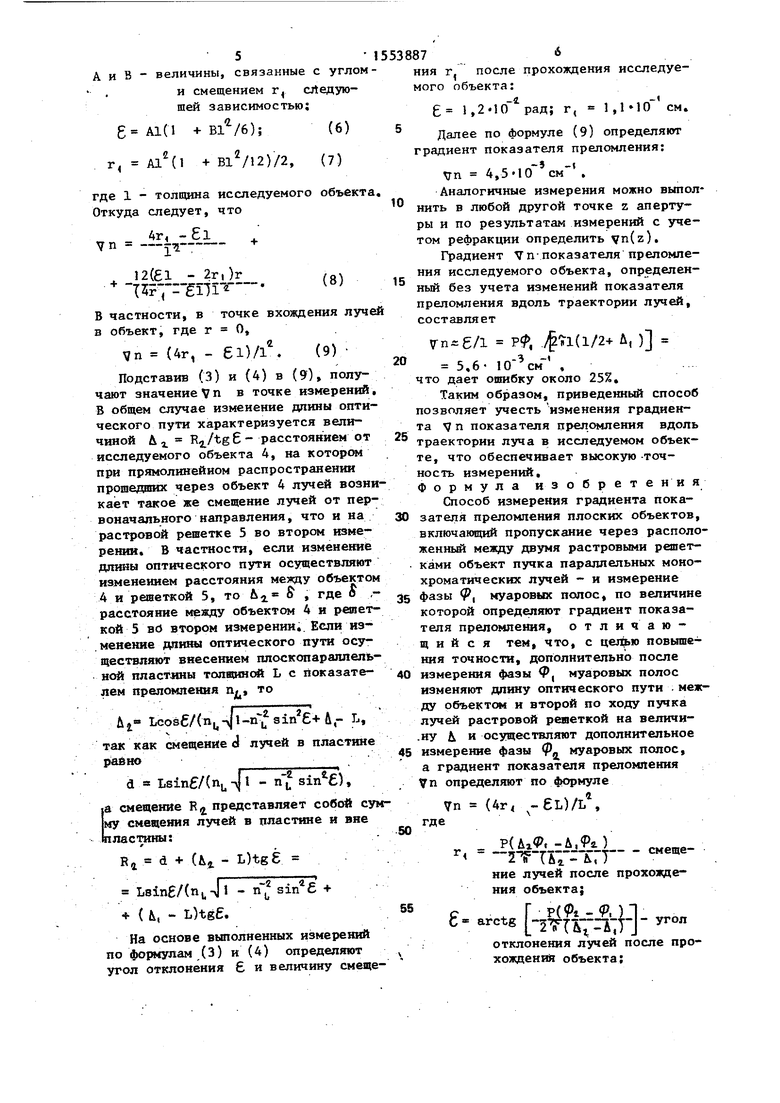
На фиг.1 изображена блок-схема одного из вариантов устройства, с помощью которого может быть реализовано изобретение; на фиг.2, 3 - муаровые картины, полученные при измерении градиента показателя преломления раствора поваренной соли.
Устройство содержит последовательно расположенные на оптической оси источник 1 света, оптическую систему 2, первую растровую решетку 3, исследуемый объект 4, вторую растровую решетку 5, регистратор 6 интенсивйости освещенности света и плоскопараллельную пластину 7 -для изменения длины оптического пути между объектом 4 и второй растровой решеткой 5. В качестве источника 1 света используется монохроматический источник в видимом диапазоне, например ртутная лампа, твердотельный или газовый лазер, Оптическая система 2 предназначена для создания параллельного пучка лучей и может включать линзы или параболические зеркала,цветовые фильтры и ограничивающую изображение источника щель. На фиг.1 оптическая система 2 состоит из рассеивающей и собирающей линз. Растровые решетки 3 и 5 представляют собой прозрачные пластины, на которые нанесены параллельные штрихи, не пропускающие свет. Пространственный период решеток, шаг решеток и расстояние между объектом 4 и второй растровой решеткой 5 выбирают с учетом
г
Я
а
«
СП С71
С
00 00
1
Чувствительности,, Угол oL поворота Штрихов растровой решетки 5 относительно штрихов растровой решетки 3 вокруг оптической оси должен лежать в пределах 14°, Это необхо- #имо для возникновения муарового эффекта. Ориентацию штрихов на растровых решетках 3 и 5 выбирают исходя из того, что измеряемый градиент Направлен перпендикулярно биссектри- с|е угла об между штрихами решеток 3 и 5.
1 Способ реализован в устройстве Следующим образом Формируемый источником 1 света и «Оптической системой 2 пучок параллельных лучей после прохождения через растровую решетку 3 направляется на исследуемый объект 4, при вы- аоде из которого лучи смещаются относительно первоначального направле- н|ия вниз на величину Гц и отклоняются на угол 6 После прохождения второй растровой решетки 5 на экра- регистратора 6 лучи формируют муаровые полосы, которые регистрируют- фотоаппаратом Пример муаровой картины, зарегистрированной при ис- с ледовании растра поваренной соли, представлен на фиг,2, Измерение фазы муаровых полос осуществляют на основе сравнения с фазой полос в той н|е точке, но в другой момент времени, когда в точке измерений градиент показателя преломления Vn 0,При наследовании Диффузии сравнивают ф;азу в момент измерений с фазой в же точке после завершения про- Цесса диффузииа
После измерения фаза Ф, муаровых полос изменяют длину оптического пути между объектом 4 и решеткой 5 на величину & ,
Изменение длины оптического пути возможно перенесением объекта 4 или р(ешетки 5 вдоль оптической оси; внесением между объектом 4 и решеткой 5 прозрачной плоскопараллельной пластины с показателем преломления,отличным от показателя преломления среды между объектом 4 и решеткой 5; разде- л|ением пучка после прохождения объекта 4 на два пучка с разной длиной оптического пути, направленных на разные растровые решетки и регистраторы и т.п. Затем измеряют фазу Ра муаровых полос, возникающую на экра15538874
не при наличии пластины 7 (представлена на фиг.З).
По двум независимым измерениям фаз $, и муаровых полос при раз- 5 ных длинах Д, и Д4 оптического пути между объектом 4 и второй растровой решеткой 5 определяет величину смещения гл лучей после прохождения исследуемого объекта и угол 5 отклонения лучей после прохождения объекта. Действительно, в приближении геометрической оптики, выполняющемся для муаровых полос
10
15
Ф«21Г
(г, + A,- tgЈ); (1)
2 i
9, (г, + &-.tgE),
(2)
20 где &,-tgЈ R - - смещение лучей
между объектом 4 и второй решеткой 5 в первом измерении;
b,tgЈ. RЈ- смещение лучей между 25объектом 4 и второй решеткой 5 во втором измерении;
Р - пространственный период параллельных штри- 30хов на растровых решетках.
Смысл соотношений (1) и (2) состоит в том, что смещение лучей на величину Гц + RI или г + Ег экви- 35 валентно изменению фазы растровой решетки на величину или Ра соответственно При этом под измеряемой фазой муаровых полос подразумевается лишь та часть фазы, которая 40 связана с отклонением и смещением лучей под действием неоднородностей. Таким образом, измерения фазы муаровых полос Ф, и Фа позволяют определить г, и Ј :
45Р ,, h((Pi }. ,,х
« --2Г- (); (3) Г р( рг ф, } - , .
б . arctg .r.J . (4)
50Известно, что для лучей, вошедших в плоский неоднородный объект в направлении, совпадающем с линиями разных значений градиента V п показателя преломления,
55,7 п А + Вг,(5)
где г - величина смещения лучей от первоначального направления внутри объекта;
15
Ф«21Г
(г, + A,- tgЈ); (1)
2 i
9, (г, + &-.tgE),
(2)
где &,-tgЈ R - - смещение лучей
между объектом 4 и второй решеткой 5 в первом измерении;
b,tgЈ. RЈ- смещение лучей между объектом 4 и второй решеткой 5 во втором измерении;
Р - пространственный период параллельных штри- хов на растровых решетках.
Смысл соотношений (1) и (2) состоит в том, что смещение лучей на величину Гц + RI или г + Ег экви- валентно изменению фазы растровой решетки на величину или Ра соответственно При этом под измеряемой фазой муаровых полос подразумевается лишь та часть фазы, которая связана с отклонением и смещением лучей под действием неоднородностей. Таким образом, измерения фазы муаровых полос Ф, и Фа позволяют определить г, и Ј :
Р ,, h((Pi }. ,,х
« --2Г- (); (3) Г р( рг ф, } - , .
б . arctg .r.J . (4)
Известно, что для лучей, вошедших в плоский неоднородный объект в направлении, совпадающем с линиями разных значений градиента V п показателя преломления,
7 п А + Вг,(5)
где г - величина смещения лучей от первоначального направления внутри объекта;
А и В - величины, связанные с углом- и смещением г, следуюшей зависимостью;
Б«А1(1 + ВГ/6); г, А1е(1 + В12/12)/2,
(6) (7)
исследуемого объекта. что
t
+ 12(61 - 2r,)r
(8)
В частности, в точке вхождения лучей в объект, где г О,
Vn (4r, - 61) А. (9)
Подставив (3) и (4) в (9), получают значение V п в точке измерений. В общем случае изменение длины оптического пути характеризуется величиной А г КгЛ§ Ј - расстоянием от исследуемого объекта 4, на котором при прямолинейном распространении прошедших через объект 4 лучей возникает такое же смещение лучей от первоначального направления, что и на растровой решетке 5 во втором измерении. В частности, если изменение длины оптического пути осуществляют изменением расстояния между объектом
20
Градиент Vn-показателя преломления исследуемого объекта, определенный без учета изменений показателя преломления вдоль траектории лучей, составляет
Р, (1/2+ Л, ) 10 3см .
25
5,6 что дает ошибку около 25%.
Таким образом, приведенный способ позволяет учесть изменения градиента V п показателя преломления вдоль траектории луча в исследуемом объекте, что обеспечивает высокую -точность измерений. Формула изобретения
Способ измерения градиента пока- 30 зателя преломления плоских объектов, включающий пропускание через располо женный между двумя растровыми решетками объект пучка параллельных монохроматических лучей - и измерение
IVIVл /wnte L , лучспп ncsi«icj/cn.nc
4 и решеткой 5, то &г & , где о ,- 35 фазы ф( „уаровых полос, по величине
расстояние между объектом 4 и решеткой 5 ad втором измерении. Если изменение длины оптического пути осуществляют внесением плоскопараллелькоторой определяют градиент показателя преломления, отличающийся тем, что, с целью повышения точности, дополнительно после
которой определяют градиент показа теля преломления, отличающийся тем, что, с целью повыш ния точности, дополнительно после
ной пластины толщиной L с показате- 40 измерения фазы Ф, муаровых полос лем преломления п, то
изменяют длину оптического пути м ду объектом и второй по ходу пучка лучей растровой решеткой на величи .ну Ь. и осуществляют дополнительно 45 измерение фазы Фа муаровых полос, а градиент показателя преломления 7п определяют по формуле
uj, ЪсозЈ/(пцЛ|1-п ц sinJЈ+A,- L,
так как смещение с лучей в пластине равно
d LsinЈ/(nu I - nfЈ ),
ia смещение R4 представляет собой сум- |му смещения лучей в пластине и вне пластины:
R d + Ц, - L)tgЈ
L8in6/( - if sin б + « { Ь, - L)tgЈ.
На основе выполненных измерений по формулам (3) и (4) определяют угол отклонения Ј и величину смещения г. после прохождения исследуемого объекта:
Ј 1, (Г рад; г, 1,(Г см.
Далее по формуле (9) определяют градиент показателя преломления:
Vn 4,5 «10 см .
Аналогичные измерения можно выполнить в любой другой точке z апертуры и по результатам измерений с учетом рефракции определить yn(z).
Градиент Vn-показателя преломления исследуемого объекта, определенный без учета изменений показателя преломления вдоль траектории лучей, составляет
Р, (1/2+ Л, ) 10 3см .
5,6 что дает ошибку около 25%.
Таким образом, приведенный способ позволяет учесть изменения градиента V п показателя преломления вдоль траектории луча в исследуемом объекте, что обеспечивает высокую -точность измерений. Формула изобретения
Способ измерения градиента пока- зателя преломления плоских объектов, включающий пропускание через расположенный между двумя растровыми решетками объект пучка параллельных монохроматических лучей - и измерение
л /wnte L , лучспп ncsi«icj/cn.nc
фазы ф( „уаровых полос, по величине
которой определяют градиент показателя преломления, отличающийся тем, что, с целью повышения точности, дополнительно после
измерения фазы Ф, муаровых полос
40 измерения фазы Ф, муаровых полос
изменяют длину оптического пути между объектом и второй по ходу пучка лучей растровой решеткой на величи- .ну Ь. и осуществляют дополнительное 45 измерение фазы Фа муаровых полос, а градиент показателя преломления 7п определяют по формуле
7n (4r4 -6D/L ,
где
- - -
ние лучей после прохождения объекта;
g, arctg . угол
отклонения лучей после прохождения объекта;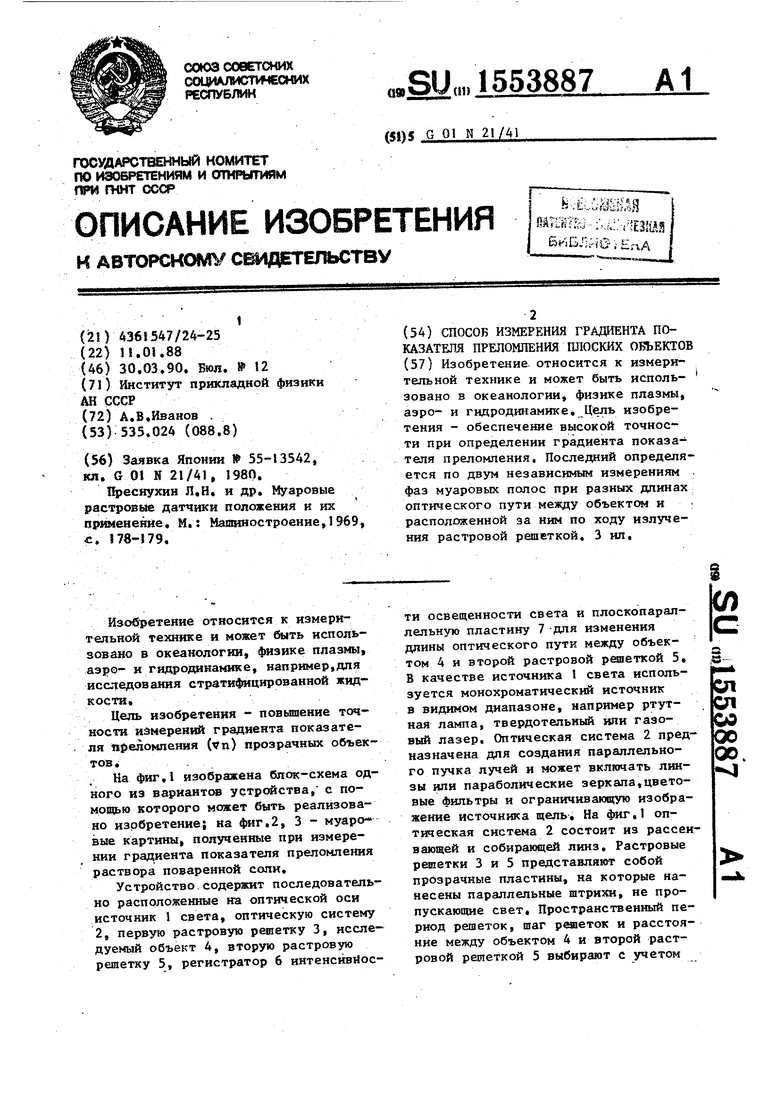

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отсчета линейных перемещений объектов | 1987 |
|
SU1569529A1 |
| Оптический способ измерения линейных перемещений | 1986 |
|
SU1404809A1 |
| Устройство для измерения градиента коэффициента преломления прозрачных сред | 1980 |
|
SU881571A1 |
| Устройство для измерения относительных перемещений двух объектов | 1984 |
|
SU1450761A3 |
| Способ определения деформаций объекта и устройство для его осуществления (его варианты) | 1983 |
|
SU1247649A1 |
| Устройство для измерения измененийКОэффициЕНТА пРЕлОМлЕНия пРОзРАчНыХСРЕд C гРАдиЕНТОМ КОэффициЕНТА пРЕ-лОМлЕНия | 1978 |
|
SU807164A1 |
| Устройство для измерения неоднородностей двулучепреломления в кристаллах | 1980 |
|
SU958922A1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384812C1 |
| Способ определения профиля показателя преломления оптических неоднородностей и устройство для его осуществления | 1990 |
|
SU1777053A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2004 |
|
RU2277695C1 |

Изобретение относится к измерительной технике и может быть использовано в океанологии, физике плазмы, аэро- и гидродинамике. Цель изобретения - обеспечение высокой точности при определении градиента показателя преломления. Последний определяется по двум независимым измерениям фаз муаровых полос при разных длинах оптического пути между объектом и расположенной за ним по ходу излучения растровой решеткой. 3 ил.
ftee.f
Редактор А.Маковская
Составитель С,Голубев Техред М.Дидык
Заказ 453
Тираж 508
БНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Корректор О.Кравцова
Подписное
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Преснухин Л.Н | |||
| и др | |||
| Муаровые растровые датчики положения и их применение | |||
| М.: Машиностроение,1969, « | |||
| Способ получения кодеина | 1922 |
|
SU178A1 |
