Фиг.1
Изобретение относится к оптико-механическому приборостроению, в частности к эндоскопии, и может быть использовано для исследования внутренних труднодоступных полостей.
Целью изобретения является повышение точности выявления дефектов.
На фиг. 1 показана структурная схема устройства; на фиг. 2 - схема преобразования с датчиком зазора.
Эндоскоп содержит корпус 1 с окуляром 2, диоптрийным кольцом 3, фокусирующим кольцом 4, полупрозрачным зеркалом 5 и ручкой 6 управления, световод 7 подсветки и информационный световод 8. Световод 7 подсветки проходит от источника света (не показан) блока 9 питания через вспомогательную гибкую трубку 10, кор и рабоч ю гибкую трубку 11 к объективу 12, установленному в управляемой головке 13. Информационный световод 8 проходит от объектива 12 через трубку 1 1 и корпус 1 к окуляру 2. В корпусе 1 расположен фоточунствительный элемент 14, последовательно соединенный с фотодетектором 15 и компаратором 16. На управляемой головке 13 коаксиально установлен датчик 17 зазора преобразователя 18, связанного через второй компаратор 19 с одним из входов схемы 20 совпадения. При этом к другому входу схемы 20 совпадения подключен выход компаратора 16, а к выходу - регистратор 21
Датчик 17 (азора может быть выполнен (фиг. 1), например, в виде катушки индуктивности, а преобразователь 18 (фиг. 2) - в виде последовательно включенных генерато ра 22. к контуру которого подключена катушка 17, силителя 23 и амплитудного детектора 24.
Один конец трубки 11 закреплен в корпусе 1, а на другом расположена головка 13. Концы трубки 10 закреплены на кор- пчсе 1 и в блоке 9 питания, который служит для подсветки и питания электронной системы.
Диоптрийная настройка окуляра 2, связанного с диоптрийным кольцом 3, производится путем вращения последнего. Фокусировка эндоскопа осуществляется путем перемещения объектива 12 относительно торца световода 8 вращением кольца 4. Изгиб трубки 1 1 производится ручкой 6 управления, которая связана с головкой 13, например, управляющими тросами. Световоды 7 и 8 выполнены, например, в виде жгутов оптических волокон.
Эндоскоп работает следующим образом.
Включают блок 9 питания и вводят трубку 11 в исследуемую полость (не изображена). При этом световой поток проходит от источника света блока 9 питания по световоду 7 подсветки до исследуемой поверхности, отражается от нее и распространяется
0
0
по информационному световоду 8 в направлении окуляра 2. В результате на выходном торце световода 8 формируется мозаичное изображение поверхности исследуемого объекта, разрешающая способность которого определяется числом волокон в жгуте световода 8. Полученное изображение наблюдают с помощью окуляра 2, добиваясь четкости путем вращения колец 3 и 4. С помощью ручки 6 наводят эндоскоп на желаемый участок исследуемой поверхности объекта внутри полости и обеспечивают сканирование светового потока. Выявление реальных дефектов при контроле поверхности исследуемого объекта осуществляется
5 путем перемещения головки 13 вместе с объективом 12 и датчиком 17 по отношению к исследуемому объекту или перемещением исследуемого объекта по отношению к головке 13, например, вращения исследуемого объекта с помощью штатного валоповорот- ного устройства турбоагрегата со скоростью вращения порядка 3 об/мин при контроле простых по форме деталей и со скоростью вращения порядка 0,1 об/мин при контроле более сложных по форме деталей. При на5 личии дефектов (трещин, раковин и т. д.) или затемнений происходит модуляция отраженного светового потока.
Модулированный световой поток, частично отражаясь от полупрозрачного зеркала 5, попадает на фоточувствительный элемент 14
0 и далее на фотодетектор 15 и компаратор 16. С последнего информация о наличии дефектов или затемнений на исследуемой поверхности поступает в виде двоично-кодированного сигнала на вход схемы 20 совпадения.
5
Одновременно указанные дефекты или изменения зазора между головкой 13 и исследуемым объектом вызывают изменения картины вихревых токов, наводимых на исслео дуемой поверхности датчиком 17. В результате происходит изменение амплитуды сигнала генератора 22. Этот сигнал поступает через усилитель 23 на амплитудный детектор 24 и далее на компаратор 19. С последнего информация о наличии дефектов или
5 изменении зазора между головкой 13 и исследуемым объектом поступает в виде двоично- кодированного сигнала на другой вход схемы 20 совпадения. Только при одновременном поступлении сигналов на оба входа схемы 20 совпадения на выходе ее формируется сигнал, несущий информацию о наличии дефектов на исследуемой поверхности, который фиксируется с помощью регистратора 21.
Таким образом, преимуществом предло5 женного устройства является то, что сигналы, несущие «ложную информацию, т. е. информацию не о дефектах, а о затемнениях или об изменениях зазора между головкой 13 и
0
исследуемым объектом, через схему 20 совпадения не проходят и не регистрируются. В результате повышается точность выявления дефектов исследуемой поверхности.
При эксплутации турбин это позволяет исключить необоснованные остановы турбоагрегатов, связанные с выявлением «лож- ных дефектов.
Формула изобретения
Эндоскоп, содержащий корпус с окуляром, диоптрийным кольцом, фокусирующим кольцом, полупрозрачным зеркалом и ручкой управления, информационный световод и световод подсветки, рабочую и вспомогательную гибкие трубки, управляемую головку с объективом, блок питания с источником света, последовательно соединенные фоточувствительный элемент, фотодетектор и компаратор, а также регистратор, при этом один конец рабочей трубки скреплен в корпу0
0
се, а на другом ее конце расположена управ ляемая головка, концы вспомогательной трубки закреплены на корпусе и блоке питания, объектив оптически связан световодом подсветки, размещенным в рабочей и вспомогательной гибких трубках с источником света и информационным световодом, размещенным в рабочей гибкой трубке через полупрозрачное зеркало с окуляром и фоточувствительным элементом, причем окуляр связан с диоптрийным кольцом, объектив с фокусирующим кольцом, а ручка управления - с управляемой головкой, отличающийся тем, что. с целью повышения точности выявления дефектов, он дополнительно снабжен последовательно соединенными преобразователем с датчиком зазора и вторым компсратором, а также схемой совпадения, к входам которой подключены выходы первого и второго компараторов, а к выходу - регистратор, причем датчик за эора установлен на управтяемой головке коаксиально ей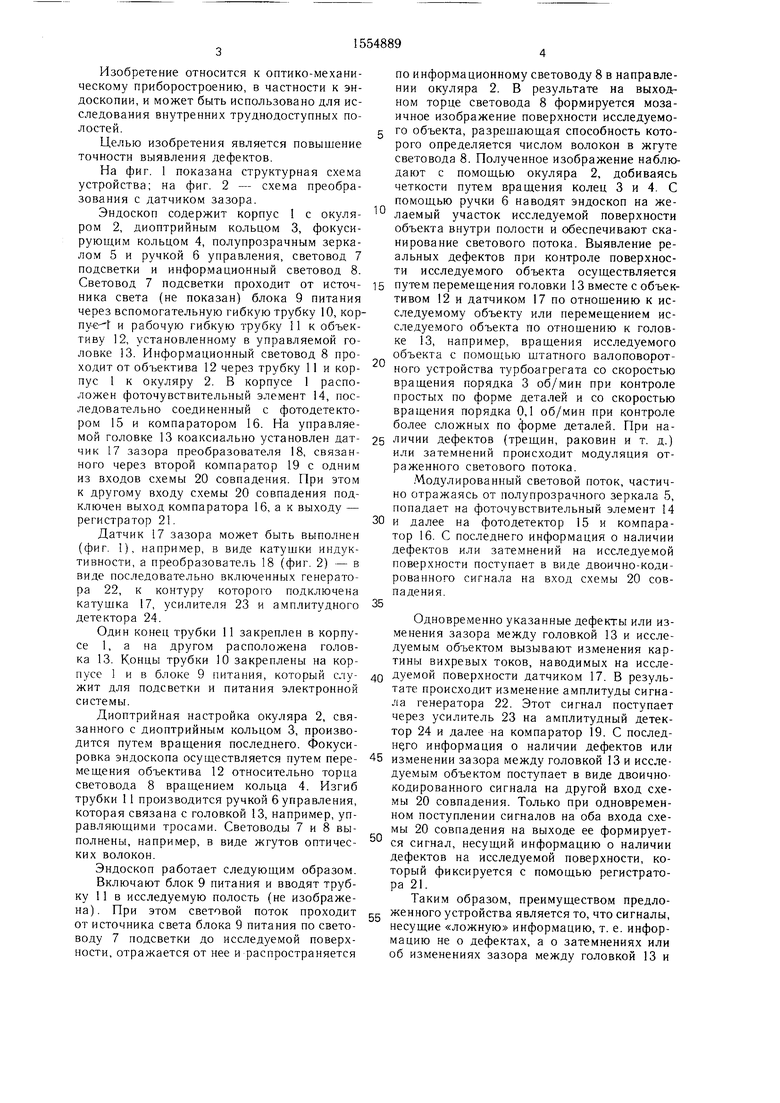

| название | год | авторы | номер документа |
|---|---|---|---|
| Эндоскоп | 1980 |
|
SU950303A1 |
| АВТОКОЛЛИМАЦИОННЫЙ ЭНДОСКОП | 2005 |
|
RU2294552C2 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2003 |
|
RU2239179C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 1998 |
|
RU2168166C2 |
| ОПТИКО-ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ВИЗУАЛЬНОГО КОНТРОЛЯ И ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ | 2011 |
|
RU2480799C2 |
| Эндоскоп | 1982 |
|
SU1097263A1 |
| АВТОКОЛЛИМАЦИОННЫЙ ЭНДОСКОП | 2002 |
|
RU2235349C2 |
| ОПТИКО-ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ВИЗУАЛЬНОГО КОНТРОЛЯ | 2011 |
|
RU2483337C2 |
| ГРАДИЕНТНАЯ ОПТИЧЕСКАЯ СИСТЕМА СВЕРХТОНКОГО ЭНДОСКОПА | 2001 |
|
RU2192029C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2405137C1 |
Изобретение относится к эндоскопии и может быть использовано для исследования внутренних труднодоступных полостей. Цель изобретения - повышение точности выявления дефектов. Эндоскоп снабжен последовательно соединенными преобразователем 18 с датчиком 17 зазора и компаратором 19. Преобразователь 18 соединен через компаратор 19 со схемой 20 совпадения, к другому входу схемы 20 подключен компаратор 16, а к выходу - регистратор 21. Датчик 17 зазора установлен коаксиально на управляемой головке 13. 2 ил.
Г
22
18
23
24
Фиг.2
| Испытательные приборы и стенды | |||
| Экспресс-информация | |||
| М., ВИНИТИ, 1984, № 13 | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
