СП
ел сп
00
to
U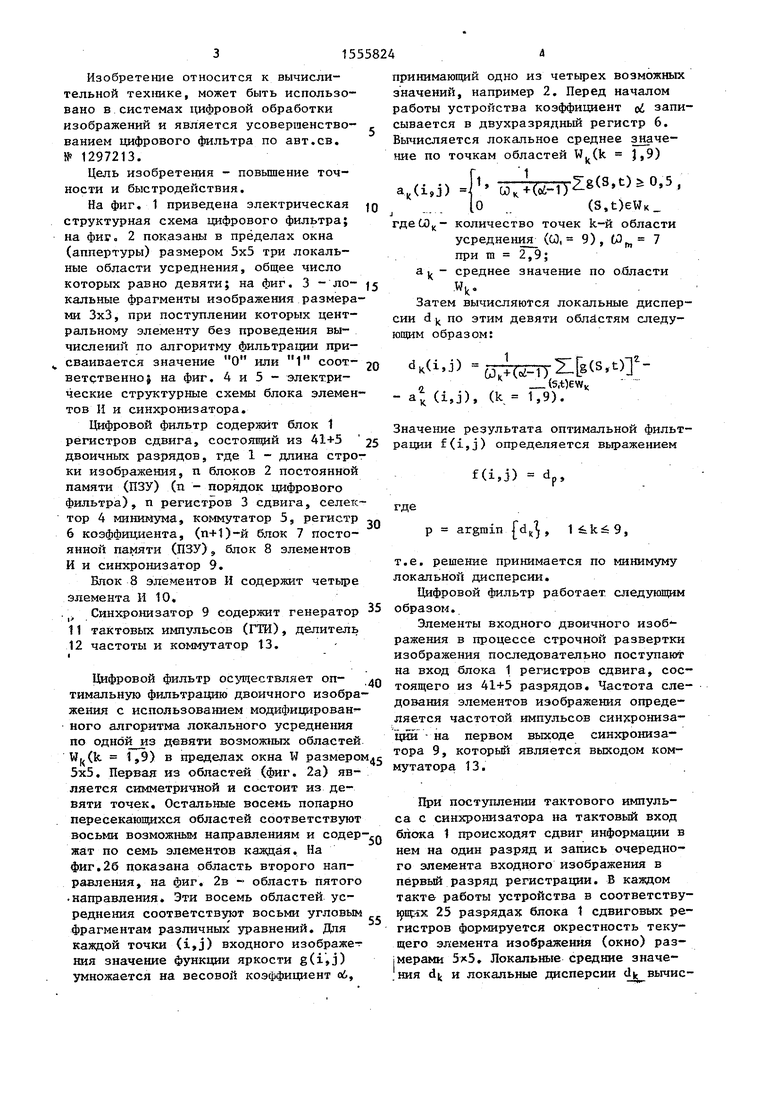
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой фильтр | 1985 |
|
SU1297213A1 |
| Устройство для обработки изображений | 1986 |
|
SU1388915A1 |
| Устройство для обработки изображений | 1990 |
|
SU1751784A2 |
| Устройство для адаптивного скользящего усреднения | 1985 |
|
SU1283793A1 |
| Устройство для обработки изображений дистанционного зондирования природных ресурсов | 1989 |
|
SU1709357A1 |
| Устройство для коррекции телевизионных сигналов изображений | 1988 |
|
SU1672488A1 |
| Устройство для вычисления порядковых статистик последовательности двоичных чисел | 1984 |
|
SU1239708A1 |
| Устройство для отображения информации на газоразрядной индикаторной панели | 1989 |
|
SU1605279A2 |
| Устройство для обработки изображений | 1988 |
|
SU1621058A1 |
| Устройство для выделения информативных элементов контура изображения | 1988 |
|
SU1587553A1 |
Изобретение относится к вычислительной технике. Цель изобретения - повышение точности и быстродействия. Цифровой фильтр содержит блок 1 регистров сдвига, блоки 2 и 7 постоянной памяти, регистры 3 сдвига, селектор 4 минимума, коммутатор 5, регистр 6 коэффициента, блок эл-тов И 8 и синхронизатор 9. Повышение точности коррекции двоичных изображений объектов достигается путем введения весового коэффициента центрального эл-та обрабатываемого локального фрагмента изображения размером 5х5. Повышение быстродействия обеспечивается за счет исключения из числа обрабатываемых эл-тов изображения, заведомо принадлежащих объекту или фону. 5 ил.
N)
Фиг.1
Изобретение относится к вычислительной технике, может быть использовано в системах цифровой обработки изображений и является усовергаенство- ванием цифрового фильтра по авт.св. № 1297213.
Цель изобретения - повышение точности и быстродействия.
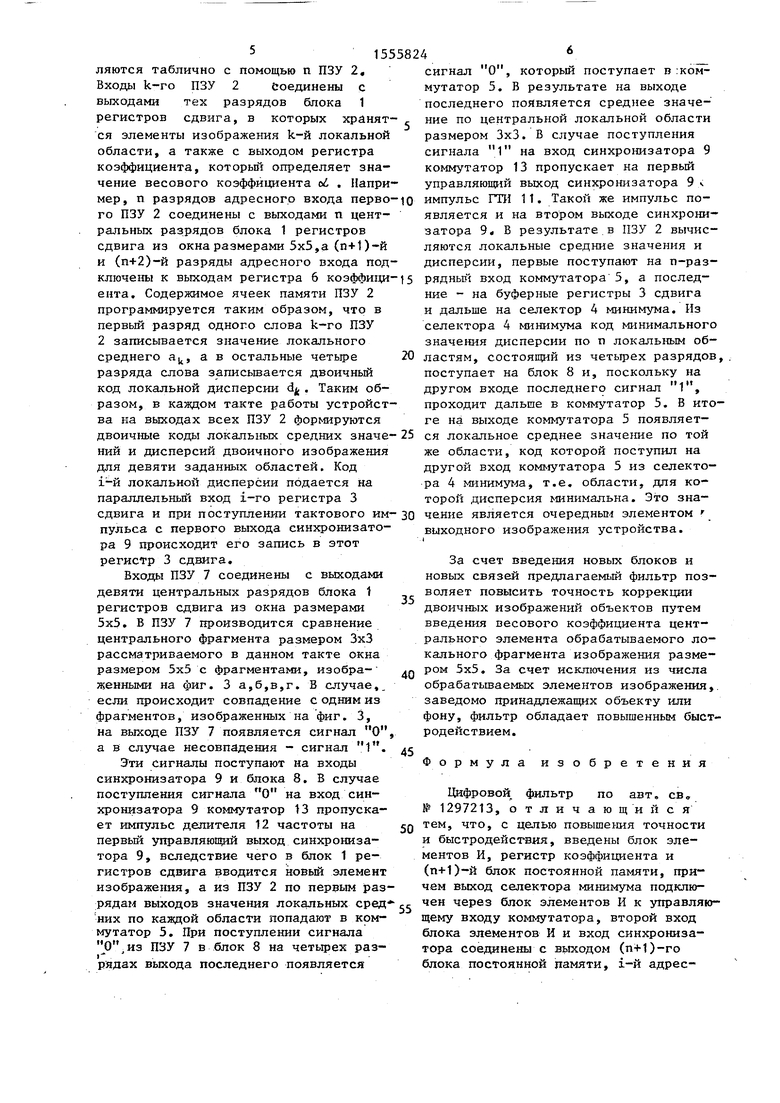
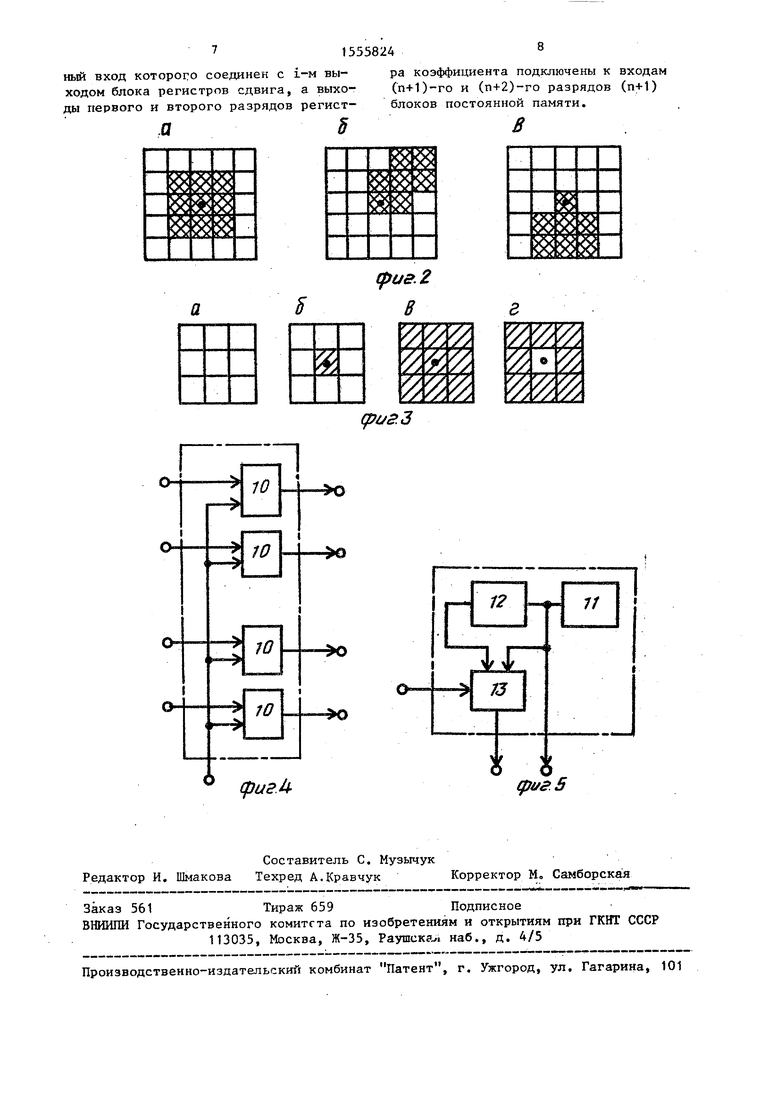
На фиг. 1 приведена электрическая структурная схема цифрового фильтра; на фиг о 2 показаны в пределах окна (аппертуры) размером 5x5 три локальные области усреднения, общее число которых равно девяти; на фиг. 3 - ло- кальные фрагменты изображения размерами 3x3, при поступлении которых центральному элементу без проведения вычислений по алгоритму фильтрации присваивается значение О или 1 соот
ветственно$ на фиг. 4 и 5 - электрические структурные схемы блока элементов И и синхронизатора.
Цифровой фильтр содержит блок 1 регистров сдвига, состоящий из 41+5 двоичных разрядов, где 1 - длина строки изображения, п блоков 2 постоянной памяти (ПЗУ) (п - порядок цифрового фильтра), п регистров 3 сдвига, селектор 4 минимума, коммутатор 5, регистр 6 коэффициента, (п+1)-й блок 7 постоянной памяти (ПЗУ), блок 8 элементов И и синхронизатор 9.
Блок 8 элементов И содержит четыре элемента И 10.
Синхронизатор 9 содержит генератор
11тактовых импульсов (ГТИ), делитель
12частоты и коммутатор 13.
I
Цифровой фильтр осуществляет оп- тимальную фильтрацию двоичного изображения с использованием модифицированного алгоритма локального усреднения по одной из девяти возможных областей Wk(k 1,9) в пределах окна W размером 5x5. Первая из областей (фиг. 2а) является симметричной и состоит из девяти точек. Остальные восемь попарно пересекающихся областей соответствуют восьми возможным направлениям и содержат по семь элементов каждая. На фиг.26 показана область второго направления, на фиг. 2в - область пятого направления. Эти восемь областей усреднения соответствуют восьми угловым фрагментам различных уравнений. Для каждой точки (i,j) входного изображения значение функции яркости g(i,j) умножается на весовой коэффициент об,
принимающий одно из четырех возможных значений, например 2. Перед началом работы устройства коэффициент оЈ записывается в двухразрядный регистр 6. Вычисляется локальное среднее значение по точкам областей Wk(k },9)
ми)
Wk.
Затем вычисляются локальные дисперсии d k по этим девяти областям следующим образом:
d(i j) .g(s,t)2„{5,t)ewK
- a (i,j), (k 1,9).
Значение результата оптимальной фильтра ции f(i,j) опр еделяется выражением
Ш,3) dp,
где
р argmin fdK , I6:kЈ9,
т.е. решение принимается по минимуму локальной дисперсии.
Цифровой фильтр работает следующим образом.
Элементы входного двоичного изоб-- ражения в процессе строчной развертки изображения последовательно поступают на вход блока 1 регистров сдвига, состоящего из 41+5 разрядов. Частота следования элементов изображения определяется частотой импульсов синхронизации на первом выходе синхронизатора 9, который является выходом коммутатора 13.
При поступлении тактового импульса с синхронизатора на тактовый вход блока 1 происходят сдвиг информации в нем на один разряд и запись очередного элемента входного изображения в первый разряд регистрации. В каждом такте- работы устройства в соответствующих 25 разрядах блока 1 сдвиговых регистров формируется окрестность текущего элемента изображения (окно) размерами . Локальные средние значе- .ния d, и локальные дисперсии d вычис515558246
ляются таблично с помощью п ПЗУ 2, Входы k-ro ПЗУ 2 Соединены с выходами тех разрядов блока 1 регистров сдвига, в которых хранятся элементы изображения k-й локальной области, а также с выходом регистра коэффициента, который определяет значение весового коэффициента оЈ . Например, п разрядов адресного входа перво-ц) импульс ГТИ 11. Такой же импульс по- го ПЗУ 2 соединены с выходами п цент- является и на втором выходе синхрони- ральных разрядов блока 1 регистров сдвига из окна размерами 5x5,а (n-И)-и и (п+2)-й разряды адресного входа подсигнал О, который поступает в коммутатор 5. В результате на выходе последнего появляется среднее значение по центральной локальной области размером 3x3. В случае поступления сигнала 1 на вход синхронизатора 9 коммутатор 13 пропускает на первый управляющий выход синхронизатора 9 ч
затора 9, В результате в ПЗУ 2 вычисляются локальные средние значения и дисперсии, первые поступают на п-разключены к выходам регистра 6 коэффици- 5 рядный вход коммутатора 5, а последента. Содержимое ячеек памяти ПЗУ 2 программируется таким образом, что в первый разряд одного слова k-ro ПЗУ 2 записывается значение локального среднего ak, а в остальные четыре разряда слова записывается двоичный код локальной дисперсии dfc. Таким образом, в каждом такте работы устройстние - на буферные регистры 3 сдвига и дальше на селектор 4 минимума. Из селектора 4 минимума код минимальног значения дисперсии по п локальным об 20 ластям, состоящий из четырех разрядо поступает на блок 8 и, поскольку на другом входе последнего сигнал 1, проходит дальше в коммутатор 5. В ит ге на выходе коммутатора 5 появляет-
ва на выходах всех ПЗУ 2 формируются
двоичные коды локальных средних значе- 25 ся локальное среднее значение по той
ний и дисперсий двоичного изображения же области, код которой поступил на
для девяти заданных областей. Код
i-й локальной дисперсии подается на
параллельный вход i-го регистра 3
другой вход коммутатора 5 из селектора 4 минимума, т.е. области, для которой дисперсия минимальна. Это зна-
сдвига и при поступлении тактового им- 30 чение является очередным элементом
пульса с первого выхода синхронизатора 9 происходит его запись в этот регистр 3 сдвига.
Входы ПЗУ 7 соединены с выходами девяти центральных разрядов блока 1 регистров сдвига из окна размерами 5x5. В ПЗУ 7 производится сравнение центрального фрагмента размером 3x3 рассматриваемого в данном такте окна размером 5x5 с фрагментами, изображенными на фиг. 3 а,б,в,г. В случае,. если происходит совпадение с одним из фрагментов, изображенных на фиг. 3, на выходе ПЗУ 7 появляется сигнал О а в случае несовпадения - сигнал 1.
Эти сигналы поступают на входы синхронизатора 9 и блока 8. В случае поступления сигнала О на вход синхронизатора 9 коммутатор 13 пропускает импульс делителя 12 частоты на первый управляющий выход синхронизатора 9, вследствие чего в блок 1 регистров сдвига вводится новый элемент
Цифровой фильтр по авт. св. № 1297213, отличающийся 5Q тем, что, с целью повышения точности и быстродействия, введены блок элементов И, регистр коэффициента и (п+1)-й блок постоянной памяти, причем выход селектора минимума подклюизображения, а из ПЗУ 2 по первым разрядам выходов значения локальных сред ее чен через блок элементов И к управляю- них по каждой области попадают в ком- щему входу коммутатора, второй вход мутатор 5. При поступлении сигнала
блока элементов И и вход синхронизатора соединены с выходом (п+1)-го блока постоянной памяти, i-й адрес О ,из ПЗУ 7 в блок 8 на четырех разI
рядах выхода последнего появляется
импульс ГТИ 11. Такой же импульс по- является и на втором выходе синхрони
сигнал О, который поступает в коммутатор 5. В результате на выходе последнего появляется среднее значение по центральной локальной области размером 3x3. В случае поступления сигнала 1 на вход синхронизатора 9 коммутатор 13 пропускает на первый управляющий выход синхронизатора 9 ч
импульс ГТИ 11. Такой же импульс по- является и на втором выходе синхрони-
затора 9, В результате в ПЗУ 2 вычисляются локальные средние значения и дисперсии, первые поступают на п-разние - на буферные регистры 3 сдвига и дальше на селектор 4 минимума. Из селектора 4 минимума код минимального значения дисперсии по п локальным об- ластям, состоящий из четырех разрядов, поступает на блок 8 и, поскольку на другом входе последнего сигнал 1, проходит дальше в коммутатор 5. В итоге на выходе коммутатора 5 появляет-
другой вход коммутатора 5 из селектора 4 минимума, т.е. области, для которой дисперсия минимальна. Это зна-
выходного изображения устройства.
1
За счет введения новых блоков и новых связей предлагаемый фильтр позволяет повысить точность коррекции двоичных изображений объектов путем введения весового коэффициента центрального элемента обрабатываемого локального фрагмента изображения размером 5x5. За счет исключения из числа обрабатываемых элементов изображения, заведомо принадлежащих объекту или фону, фильтр обладает повышенным быстродействием.
Формула изобретения
Цифровой фильтр по авт. св. № 1297213, отличающийся тем, что, с целью повышения точности и быстродействия, введены блок элементов И, регистр коэффициента и (п+1)-й блок постоянной памяти, причем выход селектора минимума подклю
чен через блок элементов И к управляю- щему входу коммутатора, второй вход
чен через блок элементов И к управляю щему входу коммутатора, второй вход
блока элементов И и вход синхронизатора соединены с выходом (п+1)-го блока постоянной памяти, i-й адресный вход которого соединен с i-м выходом блока регистров сдвига, а выходы первого и второго разрядов регистS
ра коэффициента подключены к входам (п+1)-го и (п+2)-го разрядов (п+1) блоков постоянной памяти.
В
фие.2
В
МЯЛ
Z.
V
| Авторское свидетельство СССР № ,1297213, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
