315
Изобретение относится к предохранительным устройствам для рабочих органов манипуляционных систем, преимущественно для промышленных роботов
Цель изобретения - повышение надежности за счет использования механического взаимодействия между подвижной и неподвижной частями„
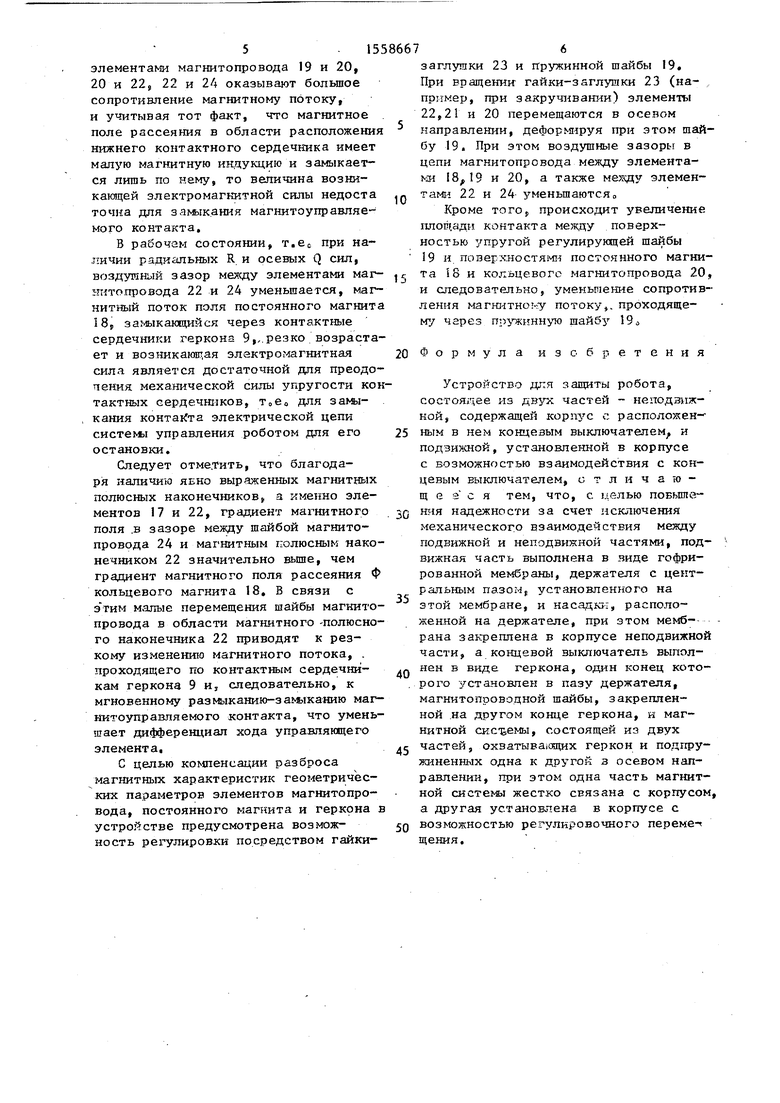
На фиг.i изображено устройство для защиты робота, разрез; на фиг02 - разрез А-А на фиг„10
Устройство состоит из двух частей неподвижной, включающей корпус 1 из немагнитного материала, в которой установлен конечный выключатель,, и подвижнойs содержащей гофрированную мембрану 25 закрепленную в корпусе посредством шайбы 3 и разрезного упргого кольца 4 о В центральное отверс- тие мембраны установлен имеющий резь бовучз часть, выполненный из диэлектрика, держатель 5, прикрепленный к мембране с помощью шайбы 6 и разрезнго упругого кольца 7„ В держателе 5 выполнено центральное отверстие 8 с конической фаской, образующей паз, в которое установлена нижняя часть геркона 9 концевого выключателя- В расширенную часть указанного отверстия установлен имеющий вывод разрезной упругий электрод 10, к которому прикреплен (например, посредством пайки) один из выводов геркона. Второй вывод геркона прикреплен к разрезному упругому электроду 11s вывод которого проходит через боковое отверстие 12 держателя 5, в пазе 13 которого установлены отогнутые концы электродов 10 и 11, На резьбовой части держателя 5 установлены изоляционная 14 и пружинная 15 шайбы и навинчена насадка 16 (последняя может быть выполнена в виде винтовой цилинрической предохранительной пружины). В корпусе 1 установлен с натягом магнитный полюсный наконечник 17 со свободно размещенным постоянным магнитом 185 на торцовую поверхность которого опирается упругая разрезная регулирующая шайба 19 В корпусе 1 также установлена состоящая из двух частей магнитная система концевого выключателя, одна часть которой, имеющая полюсный наконечник 17 и постоянный магнит 18, жестко связана с корпусом 15 а вторая часть, связанная с первой частью через пружинную шайбу 19, содержит кольцевой
10
15
Ю
8667
j4
магнитопровод 20 с изоляционной шайбой 21 и полюсный наконечник 22. Эта часть поджата регулировочной гайкой- заглушкой 23, выполненной из немагнитного материала. Разрезная магнитопро- водная шайба 24 за счет сил упругости удерживается на наружной поверхности электрода 11 и опирается на три выступа 25 последнего„
Устройство работает следующим образом,
В рабочем состоянии устройство посредством резьбовой поверхности на корпусе 1 устанавливается на рабочем органе робота. В процессе перемещения устройства совместно с рабочим органом насадка 16 в случае столкновения с препятствием под действием радиальных R и осевых Q сил отклоняется, деформируя гофрированную мембрану 2, При этом насадка 16 может двигаться в любом направлении, которое преобразуется, благодаря мембране 2 в поворотное или осевое (продольное) движение оси геркона 9 Например при действии радиальной силы R на гофрированную мембрану 2 действует мо- меитная нагрузка, приводящая к ее изгибу и, следовательно, к повороту геркона 9 в пространстве телесного
t
угла. При действии же осевого усилия Q гофрированная мембрана 2 испытывает деформацию растяжения, обеспечивая осевое (продольное) движение геркона 9. Указанные движения приводят к уменьшению воздушных зазоров между шайбой 24 и полюсным наконечником 22k а также между полюсным наконечником I7 и нижним контактным сердечником геркона 9(в случае поворотного движения оси геркона)„
Последнее обстоятельство сопровождается уменьшением сопротивления Д5 магнитопроводной цепи, включающей
пружинную шайбу 19, кольцевой магнитопровод 20, полюсный наконечник 22, шайбу 249 контактные сердечники гер- коча 9 и полюсный наконечник i 7.
В исходном состоянии, Тов.. при отсутствии внешних сил, действующих на насадку 16, магнитный поток постоянного кольцевого магнита 18 замыкается через воздушное пространство, образуя поток рассеяния ф а также частично замыкается по магнитопрово- ду включающему элементы 19-20-22-24 контактные сердечники геркона 9-17, Поскольку воздушные зазоры между
30
35
40
50
55
элементами магнитопровода 19 и 20, 20 и 22s 22 и 24 оказывают большое сопротивление магнитному потоку, и учитывая тот факт, что магнитное поле рассеяния в области расположения нижнего контактного сердечника имеет малую магнитную индукцию и замыкается лишь по нему, то величина возникающей электромагнитной силы недоста точна для замыкания магнитоуправляе- мого контакта.
В рабочзм состоянии, т.ес при наличии радиальных R и осевых Q сил, воздушный зазор между элементами магнитопровода 22 и 24 уменьшается, магнитный поток поля постоянного магнита 18, замыкающийся через контактные сердечники герконз 9,, резко возрастает и возникающая электромагнитная сила является достаточной для преодо- тения механической силы упругости контактных сердечников, т„е0 для замыкания контакта электрической цепи системы управления роботом для его остановки.
Следует отметить, что благодаря наличию яг-но выраженных магнитных полюсных наконечников, а именно элементов 17 и 22, градиент магнитного поля в зазоре между шайбой магнитопровода 24 и магнитным полюсным наконечником 22 значительно выше, чем градиент магнитного поля рассеяния Ф кольцевого магнита 18, В связи с этим малые перемещения шайбы магкито- провода в области магнитного -полюсного наконечника 22 приводят к резкому изменению магнитного потока, . проходящего по контактным сердечникам геркона 9 и следовательно, к мгновенному размыканию-замыканию маг- нктоуправляемого контакта, что уменьшает дифференциал хода управляющего элемента,
С целью компенсации разброса магнитных характеристик геометрических параметров элементов магнитопровода, постоянного магнита и геркона в устройстве предусмотрена возможность регулировки посредством гайки-
заглушки 23 и пружинной шайбы 19. При вращении гайки-заглушки 23 (например, при закручивании) элементы 22,21 и 20 перемещаются в осевом
направлении, деформируя при этом шайбу 19. При этом воздушные зазоры в цепи магнитопровода между элементами и 20, а также между элементами 22 и 24 уменьшаются0
Кроме того, происходит увеличение площади контакта между поверхностью упругой регулирующей шайбы 19 и поверхностями постоянного магнита 18 и кольцевого магнитолровода 2.0, и следовательно, уменьшение сопротивления магнитног-у потоку,, проходящему чгрез пружинную шайбу 19а
Формула изобретения
Устройство для защиты робота, состоящее из двух частей - неподзиж- кой, содержащей корпус с расположен-ным в нем концевым выключателем, и подвижной, установленной в корпусе с возможностью взаимодействия с концевым выключателем, отличаю- щ е з с я тем, что, с. целью повыше-
нчя надежности за счет исключения механического взаимодействия между подвижной и неподвижной частями, подвижная часть выполнена в виде гофрированной мембраны, держателя с центральным нэзом, установленного на этой мембране, и насадкк, расположенной на держателе, при этом мембрана закреплена в корпусе неподвижной части, а концевой выключатель выполнен в виде геркона, один конец которого установлен в пазу держателя, магнитопоовоцной шайбы, закрепленной на другом конце геркона, н магнитной скс-ьемы, состоящей из двух
частей, охватывающих геркон и подпружиненных одна к другой з осевом направлении, при этом одна часть магнитной системы жестко связана с корпусом, а другая установлена в корпусе с
возможностью регулировочного переме- щения.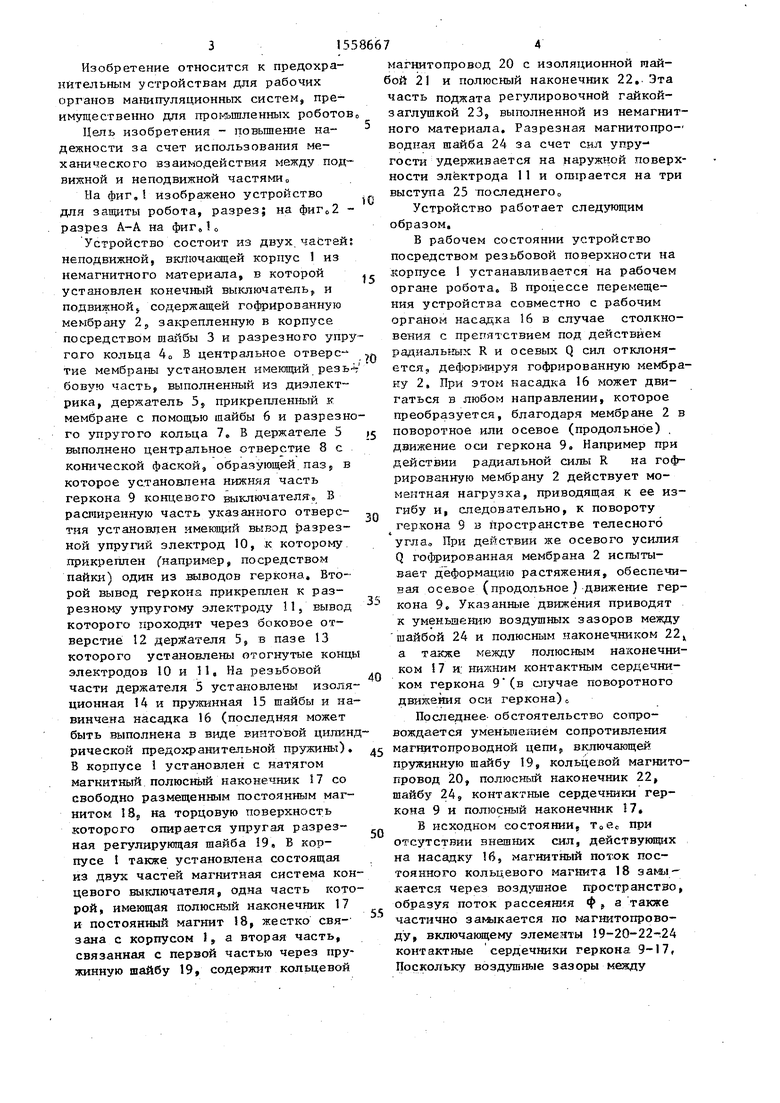
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОДИНАМИЧЕСКИЙ МИКРОФОН | 1995 |
|
RU2084081C1 |
| ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 2001 |
|
RU2230383C2 |
| МЕМБРАННЫЙ КОМПРЕССОР | 1996 |
|
RU2121078C1 |
| НАСОСНАЯ УСТАНОВКА | 1996 |
|
RU2157910C2 |
| Высоковольтный вакуумный выключатель | 1978 |
|
SU748553A1 |
| РЕЛЕ ЭЛЕКТРОМАГНИТНОЕ | 2009 |
|
RU2400856C1 |
| ПОЛЯРИЗОВАННЫЙ ГЕРКОН И ПОЛЯРИЗОВАННОЕ КОММУТАЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2474000C1 |
| Выключатель | 1982 |
|
SU1050001A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| СПОСОБ СИГНАЛИЗАЦИИ ПОКЛЕВКИ | 2010 |
|
RU2437283C1 |
Изобретение относится к предохранительным устройствам для рабочих органов манипуляционных систем, преимущественно для промышленных роботов. Целью изобретения является повышение надежности за счет исключения механического взаимодействия между подвижной и неподвижной частями. В случае столкновения насадки 16 в подвижной части устройства с препятствием происходит деформация гофрированной мембраны 2 через держатель 5, что в свою очередь приводит к повороту или осевому перемещению / в зависимости от направления действующей при столкновении силы/геркона 9. При этом за счет уменьшения воздушного зазора между магнитопроводной шайбой 19 и полюсным наконечником 22, а также между полюсным наконечником 17 и контактным сердечником геркона 9, происходит срабатывание геркона 9, подающего сигнал в систему управления роботом. 2 ил.
Фае. 2
| Патент QUA № 4514616,- ют 219/136, опублик, 19850 |
