Изобретение относится к аналого- цифровым элементам системы автоматики.
Целью изобретения является повышение точности преобразователя и достоверности определения границ диапазона преобразования.
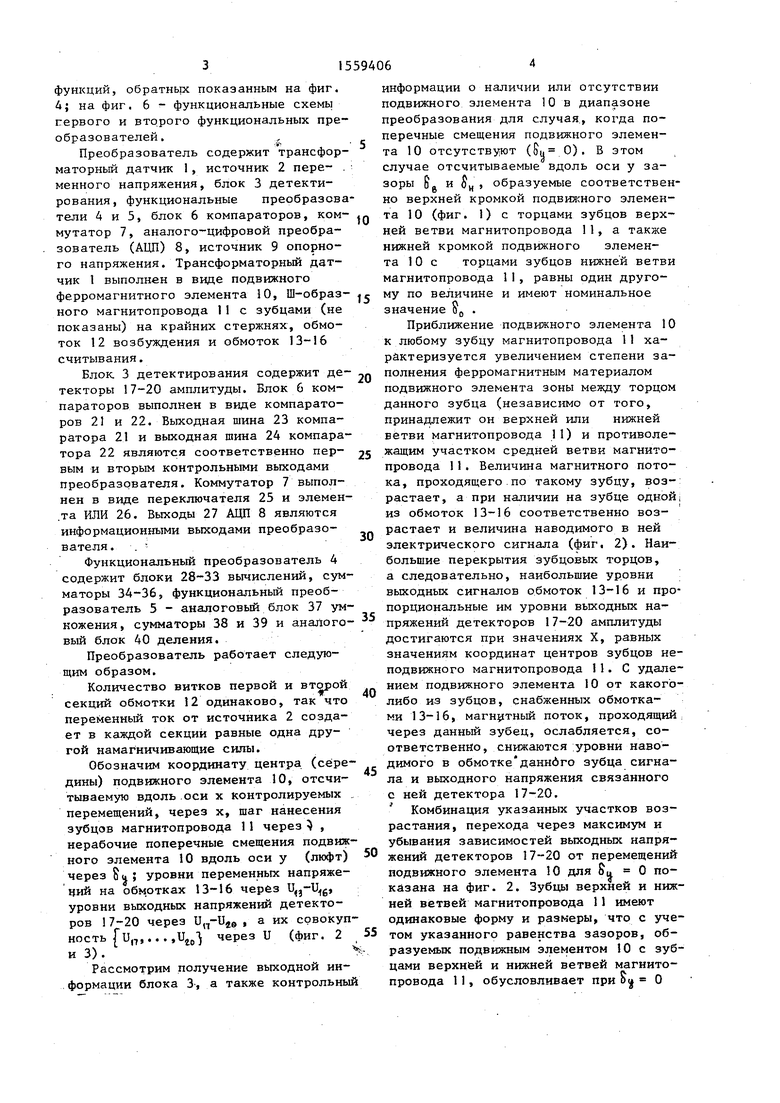
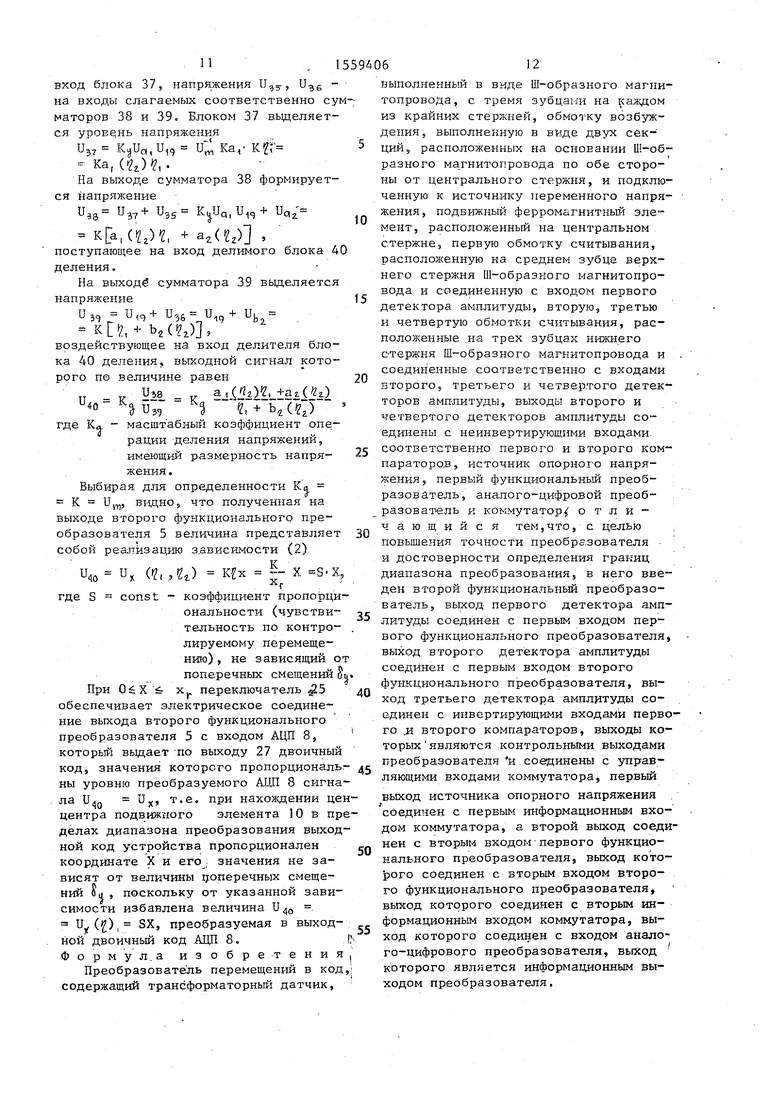
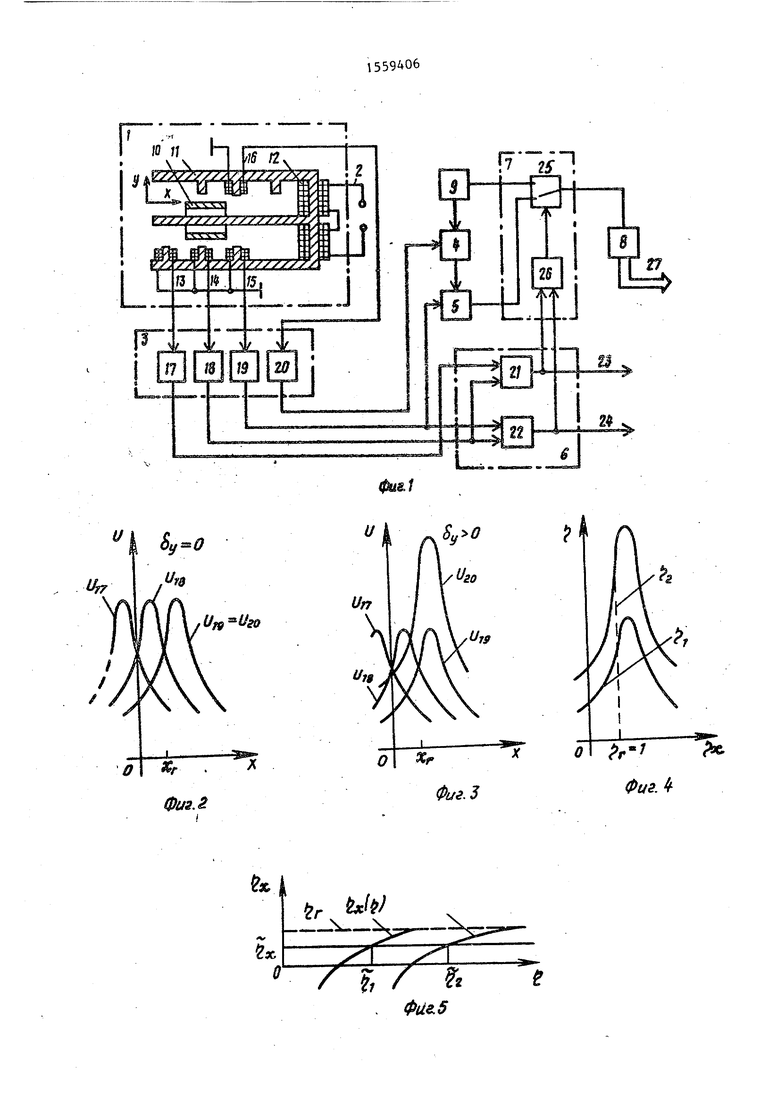
На фиг. 1 показаны элементы датчика и функциональная схема преобразователя перемещений в код; на фиг. 2 и
3 - графики зависимостей выходных напряжений блока детектирования от перемещений соответственно при отсутствии и наличии люфта контролируемого объекта; на фиг. 4 - зависимости, построенные в относительных единицах, выходных напряжений двух детекторов, используемых для формирования информации о текущих значениях контролиру-- емой координаты; на фиг. 5 - графики
функций, обратных показанным на фиг, 4j на фиг. 6 - функциональные схемы гервого и второго функциональных преобразователей.
.
Преобразователь содержит трансформаторный датчик 1, источник 2 переменного напряжения, блок 3 детектирования, функциональные преобразователи 4 и 5, блок 6 компараторов, ком- мутатор 7, аналого-цифровой преобразователь (АЦП) 8, источник 9 опорного напряжения. Трансформаторный датчик 1 выполнен в виде подвижного ферромагнитного элемента 10, Ш-образ- ного магнитопровода 11 с зубцами (не показаны) на крайних стержнях, обмоток 12 возбуждения и обмоток 13-16 считывания.
Блок 3 детектирования содержит де- текторы 17-20 амплитуды. Блок б компараторов выполнен в виде компараторов 21 и 22. Выходная шина 23 компаратора 21 и выходная шина 24 компаратора 22 являются соответственно пер- вым и вторым контрольными выходами преобразователя. Коммутатор 7 выполнен в виде переключателя 25 и элемента ИЛИ 26. Выходы 27 АЦП 8 являются информационными выходами преобразователя. .
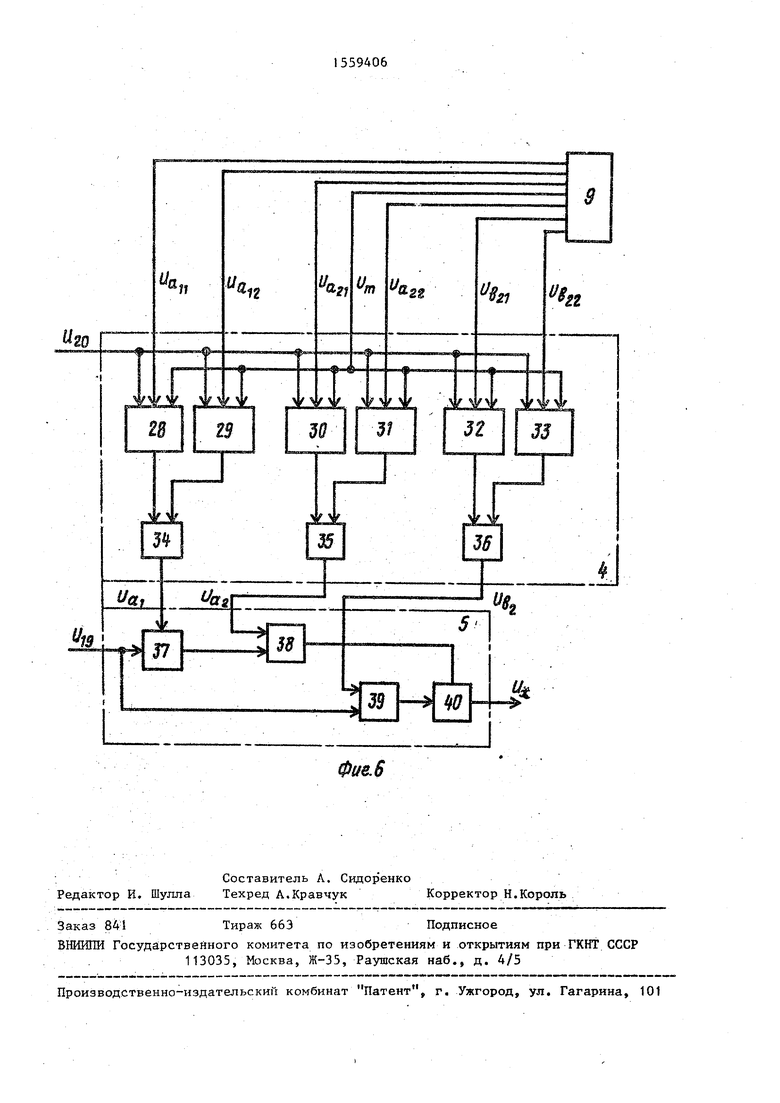
Функциональный преобразователь 4 содержит блоки 28-33 вычислений, сумматоры 34-36, функциональный преобразователь 5 - аналоговый блок 37 умножения, сумматоры 38 и 39 и аналоговый блок 40 деления.
Преобразователь работает следующим образом.
Количество витков первой и второй секций обмотки 12 одинаково, так что переменный ток от источника 2 создает в каждой секции равные одна другой намагничивающие силы.
Обозначим координату центра (середины) подвижного элемента 10, отсчитываемую вдоль оси х контролируемых перемещений, через х, шаг нанесения зубцов магнитопровода 11 через , нерабочие поперечные смещения подвижного элемента 10 вдоль оси у (люфт) через Su ; уровни переменных напряжений на обмотках 13-16 через , уровни выходных напряжений детекторов I7-20 через Un-U4e , а их совокупность Г ип,... ,иго через U (фиг. 2 и 3) .
Рассмотрим получение выходной информации блока 3, а также контрольный
ц
Q r
Q 5
50 5
0
45
информации о наличии или отсутствии подвижного элемента 10 в диапазоне преобразования для случая, когда поперечные смещения подвижного элемента 10 отсутствуют (Su 0). В этом случае отсчитываемые вдоль оси у зазоры В6 и ом образуемые соответственно верхней кромкой подвижного элемента 10 (фиг. 1) с торцами зубцов верхней ветви магнитопровода 11, а также нижней кромкой подвижного элемента 1 0 с торцами зубцов нижней ветви магнитопровода 11, равны один другому по величине и имеют номинальное значение й0 .
Приближение подвижного элемента 10 к любому зубцу магнитопровода 11 характеризуется увеличением степени заполнения ферромагнитным материалом подвижного элемента зоны между торцом данного зубца (независимо от того, принадлежит он верхней или нижней ветви магнитопровода 11) и противолежащим участком средней ветви магнитопровода 11. Величина магнитного потока, проходящего по такому зубцу, возрастает, а при наличии на зубце одной, из обмоток 13-16 соответственно возрастает и величина наводимого в ней электрического сигнала (фиг. 2). Наибольшие перекрытия зубцовых торцов, а следовательно, наибольшие уровни выходных сигналов обмоток 13-16 и пропорциональные им уровни выходных напряжений детекторов 17-20 амплитуды достигаются при значениях X, равных значениям координат центров зубцов неподвижного магнитопровода 11. С удалением подвижного элемента 10 от какого- либо из зубцов, снабженных обмотками 13-16, магнитный поток, проходящий через данный зубец, ослабляется, соответственно, снижаются уровни наводимого в обмотке данного зубца сигнала и выходного напряжения связанного с ней детектора 17-20.
Комбинация указанных участков возрастания, перехода через максимум и убывания зависимостей выходных напряжений детекторов 17-20 от перемещений подвижного элемента 10 для Su 0 показана на фиг. 2. Зубцы верхней и нижней ветвей магнитопровода 11 имеют одинаковые форму и размеры, что с учетом указанного равенства зазоров, образуемых подвижным элементом 10 с зубцами верхней и нижней ветвей магнитопровода 11, обусловливает при О
равенство уровней сигналов U U16 и U (Cj 11го соответственно. Нулевое значение координаты X (нижняя граница диапазона преобразования) привязано К положению подвижного элемента 10, для которого уровни выходных сигналов обмоток 13 и 14, а также детекторов 17 и 18 попарно равны один друзход переключателя 25, в результате чего опорный выход источника 9 соединяется с входом АЦП 8, на выходе которого и в этом случае устанавливается код переполнения.
Таким образом, информационной совокупностью кода переполнения АЦП 8 и напряжения единичного уровня ши
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный преобразователь перемещения в код | 1987 |
|
SU1439736A1 |
| Преобразователь угловых перемещений | 1987 |
|
SU1543223A1 |
| Устройство для регистрации ресурса машин | 1989 |
|
SU1711210A1 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ В ЦИФРОВОЙ КОД ОТКЛОНЕНИЯ | 1992 |
|
RU2074396C1 |
| Способ гамма-спектрометрии и гамма-спектрометр | 1990 |
|
SU1803896A1 |
| Электромагнитный преобразователь перемещения | 1988 |
|
SU1647227A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АМПЛИТУДЫ ИМПУЛЬСОВ И ИЗМЕРИТЕЛЬ ЕГО РЕАЛИЗУЮЩИЙ (ВАРИАНТЫ) | 2021 |
|
RU2773621C1 |
| Преобразователь угол-код | 1987 |
|
SU1474844A2 |
| Устройство для контроля качества материалов и изделий | 1988 |
|
SU1642367A1 |
Изобретение относится к аналого-цифровым элементам автоматики. Целью изобретения является повышение точности преобразователя и достоверности определения границ диапазона преобразования. Для этого в преобразователь перемещений в код, содержащий трансформаторный датчик, четыре детектора амплитуд, два компаратора, источник переменного напряжения, источник опорного напряжения, коммутатор, первый функциональный преобразователь и аналого-цифровой преобразователь, введен второй функциональный преобразователь. При нахождении подвижного элемента в пределах преобразования перемещений на выходах компараторов устанавливаются напряжения низкого уровня и к входу аналого-цифрового преобразователя подключается выход второго функционального преобразователя, который совместно с первым функциональным преобразователем воспроизводит зависимость координаты подвижного элемента от величин продетектированных сигналов, получаемых на выходах трансформаторного датчика. Значения входного кода аналого-цифрового преобразователя пропорциональны контролируемой координате и не зависят от нерабочих поперечных смещений подвижного элемента. Когда подвижный элемент выводится из диапазона преобразования, на одном из выходов компараторов устанавливается напряжение высокого уровня, к входу аналого-цифрового преобразователя подключается источник опорного напряжения и на информационных выходах формируется код переполнения, а на соответствующем контрольном выходе устанавливается сигнал высокого уровня. 6 ил.
гому U13 U
-44
U,7
Верхняя гра- ,п ны 23 предлагаемый преобразователь
ница хг диапазона преобразования привязана к положению подвижного элемента 10, для которого попарно равными являются величины выходных сигналов обмоток 14 и 15, а также детекторов 18 и 19 U
44
U
tf
и)В и„
Для
определенности принято, что параметры датчика 1 обеспечивают положение хг (фиг. 2) .
Коммутационное состояние переключателя 25 определяется следующим образом. Если на его управляющий вход воздействует напряжение нулевого уровня, то к входу АЦП 8, который (для определенности) является устройством параллельного действия, подключается выход функционального преобразователя 5, если же на управляющий вход переключателя 25 воздействует напряжение единичного уровня, то к входу АЦП 8 подключается выход источника 9. Когда подвижный элемент 10 выведен влево за пределы диапазона преобразования перемещений (х « 0), то )g
U
15
на выходе компаратора 21 устанавливается напряжение единичного уровня, а на выходе компаратора 22 - напряжение нулевого уровня. Одновременно высокий уровень напряжения с выхода компаратора 21 воздействует через элемент ИЛИ 26 на управляющий вход пере- .ключателя 25. Тогда к входу АЦП 8 подключается опорный выход источника 9, напряжение на котором выбирается заведомо большим, чем верхний предел диапазона преобразования входного напряжения АШ 8, и на выходе АЦП 8 устанавливается код переполнения, содержащий единицы во всех разрядах.
Когда подвижный элемент 10 выведен вправо за пределы диапазона преобразования перемещений (), то
и„
U Ut-j , на выходе компаратора 21 устанавливается напряжение нулевого уровня, а на выходе компаратора 22 - напряжение единичного уров ня, Выходное напряжение единичного уровня компаратора 22 через элемент ИЛИ 26 воздействует на управляющий
-
.
15
20
сигнализирует о выводе подвижного элемента 10 влево за пределы диапазона преобразования перемепэний, а совокупностью кода переполнения АЦП 8 и напряжения единичного уровня шины 24 - о выходе подвижного элемента 10 из диапазона преобразования вправо. Наличие в этих случаях на выходе АЦП 8 кода переполнения исключает возможность выдачи устройством ложной, но сходной с достоверной информации.
Когда центр подвижного элемента 10 находится в диапазоне преобразования 25 перемещений, то U1S , U,0 s , а выходные напряжения компараторов 21 и 22 имеют нулевые уровни, воздействующие через элемент ИЛИ 26 на управляющий вход переключателя 25, что обусловливает подключение к входу АЦП 8 выхода функционального преобразователя 5. При Jo 0 напряжение U(o(X) и2о(Х)и однозначно соответст- вует координате подвижного элемента 10 (фиг. 2). При нерабочем смещении подвижного элемента 10 0« О вверх величина сигнала, наводимого в обмотке 16, и величина напряжения, снимаемого с выхода детектора 20, возрастают, а уровни сигналов в обмотках 13-15 и соответствующих им выходных напряжений детекторов 17-19 снижаются (фиг. 3).
При нерабочих смещениях подвижно30
35
40
45
го элемента 10 S. 0 сигналы в об0
50
мотках 13-15 возрастают сравнительно с их уровнями, соответствующими отсутствию нерабочих смещений, а сигнал в обмотке 16 ослабляется. Величина выходного напряжения каждого из де- текторов блока 3 прямо пропорциональна уровню его выходного сигнала.
Появление нерабочих поперечных смещений, изменяя величину сигналов в обмотках 13-15, не изменяет коорди- кат проекций центра подвижного элемента 10 для его положений, при которых уровни сигналов обмоток смежных зубцов нижней ветви магнитопровода 11
являются равными один другому, т.е. равенства
и„() U4f (X-0);
(X хг) 0,(Х хг) являются действительными и йля случаев Su ф 0.
Поскольку люфт не влияет на характер (качественный) возрастания и убывания функции U(X), то во всем диапазоне D ,, между выходными напряжениями детекторов 17-19 поддерживаются со.- отношения
и(8 . если X 0;
U,7 Uig , если X 0;
U(8 и,7 , U1B т U19 , если х.
)в U,9 , если X х,
1q U(8 И п , если Х хг .
Следовательно л как при наличии, так и при отсутствии нерабочих сме- щений в случае вывода подвижного элемента 10 влево за пределы диапазона преобразования выход компаратора 21 находится в единичном, а выход компаратора 22 - в нулевом состояниях; при выводе подвижного элемента 10 за пределы диапазона преобразования вправо выход компаратора 21 находится в нулевом, а выход компаратора 22 в единичном состояниях; при нахождении подвижного элемента 10 вне диапазона LO, по управляющему сигналу единичного уровня с выхода элемента ИЛИ 26 переключатель 25 соединяет опорный выход источника 9 с входом АЦП 8, на выходе которого устанавливается код переполнения.
Когда при любом (- 00 00 ) центр подвижного элемента 10 перемещается внутри заданного диапазону пре образования, на шинах 23 и 24 устанавливаются напряжения нулевого уровня, и переключатель 25 соединяет с входом АЦП 8 выход второго функционального преобразователя 5.
Рассмотрим работу преобразователя, когда подвижный элемент 10 расположен в рабочем диапазоне.
Максимально возможный уровень сигнала любого из детекторов 17-20 обозначим через Um(), тогда выходные напряжения детекторов 19 и 20 представляются в безразмерной форме как отношения
2i- u«, 4t uzo/iv
Кроме того, (Х/хг) - относительные перемещения подвижного элемента 10 (фиг. 4).
0
5
0 зо
Q
Отсчет пары значений u(q jU2o уровней выходных напряжений детекторов 19 и 20 однозначно определяет относительную Ч х и, абсолютную X хг- координаты подвижного элемента 10 на оси контролируемых перемещений .
Величины l , Чг , получаемые в результате детектирования блоком 3 выходных напряжений обмоток 15 и 16, в дальнейшем используются как аргументы зависимости, отражающей установленную однозначность связи fx (i г) (Фиг. 5), которую целесообразно аппроксимировать дробно-рациональными выражениями относительно одной из величин J7, , с параметрами, зависящими от другой из величин фц
I-Т
35
х
i
5 где а
(1);
V
1
Ь| - безразмерные коэффициен - ты аппроксимации, являющиеся функциями g PJ Я безразмерные постоянные показатели степеней соответственно в слагаемых числителя и знаменателя аппроксимирующей функции;
m - число слагаемых в числителе;
п - число слагаемых в знаменателе
Зависимости а ; ( г) , Ъ , ( Ј2) представляются полиномами
™; .«.
-ЈьЦ1 3
с постоянными параметрами аппрокси-
мации а
Г
J
q (независимыми от Ј ),
Аппроксимация функции двух переменных х( реализуется функциональными преобразователями 4 и 5, причем принято m , п| 2; р4 q1 1; рг q О, Ь, 0, т.е. указанные выражения аппроксимирующей функции и коэффициентов а
1
конкретизируют
ся следующим образом: к
а, , + Ь2 CW
а4 а( g Г + 5
+ аr i
(1)
Ч b,,f+
4-27
или с учетам размерности преобразуемых физических величин
0 . . к 5.2 , (2,
где Ua, KQ, ;
UQz Ka ;
иьг Kbg;
К - масштабный коэффициент параметров аппроксимации, имеющий размерность напряжения и выбираемый равным
um;
Ku масштабный коэффициент операции умножения напряжений, выбираемый равным (1 /U р, ) .
Значения коэффициентов аппроксимации, содержащихся в выражениях для а,, а2, Ь2) определяются экспериментальным или расчетным путем на этапе соответственно изготовления или проектирования преобразователей. При опытном определении коэффициентов аппроксимации диапазон преобразования перемещений разбивается на заданное число участков, с помощью образцовых средств механических измерений (например, микрометрического винта с индикатором) фиксируются значения X на границах указанных участков диапазона преобразования и изменяются соответствующие этим значениям X уровни и,„ Ц™ выходных напряжений блока 3 для ряда значений люфта оц, изменяемых в пределах Dy. Необходимост измерять сами значения 6о нет, так как в определяемой функции х (Ј) аргументами являются U1(/Um , U2o/Um и знать с достаточной точностью надо значения именно этих аргументов. Затем экспериментально полученный набор соответствий X«-(U19 U$0) или Х 2 с помощью метода наименьших квадратов преобразуется в форму дробно-рациональной функции (1). Очевидно, что соотношение Јх С 2, ( $4 0) MB 0)1, где Ч, (« О) fЈj ((u О) входит в аппроксимирующую зависимость Јх(Ј) как частный случай.
Первый функциональный преобразователь 4 формирует напряжения, входящие в выражение (2)„ как функции от аргумента U2oрр
Uq,« Ka, K(a«2V + a,2O
«а
,У€ОчР„
Vm
+ иа(,фР1а ; С3)
-Ти
.Р,-.
Ka К гг11+ а«)
Л2
ия„. ()Pil и
J« Un
п (-& гг
W
-V
къа к(ь21г; + ) (5)
5
0
5
0
Ub2l КЬ22.
Уровни иа„ , Ua(1 ,
и,
21 иагг
5 i
Ub2, , и„ йзвестные по опытным или расчетным данным, задаются (воспроизводятся) на установочных выходах источника 9.
Каждый из блоков 28-33 вычислений реализует непрерывную функцию трех переменных (фиг. 6, индексы г 28- 33 соответствуют позициям блоков 28- 33 вычислений)
„,-,.„ Л.
где Ur - выходное напряжение г-го
блока вычислений;
Uri - напряжения, подаваемые соот- иг2,иг з ветственно на его первый,
второй и третий входы; Mj, - задаваемые показатели степени.
Выходное напряжение детектора 20 и напряжения установочных выходов источника 9 разводятся по входам блоков 28-33 следующим образом:
0
U 20
и
U2 2. ЪЪ.Ъ
и и
29, г
29,3
иэз,; зз.з;
Ua,, - ,(
и
Oil
им.
1
5
0
5
иаг, им., ; Uo,zi u,.«; иь2( u,2l. ;
Ub22. U«,1
Кроме того, устанавливаются
М-26 Р,
М
14
. мзо р«1;
м
э
; М32. qa(
М
53
q
Тогда на выходах сумматоров 34-36 реализуются соотношения (3)-(5) и выделяются выходные напряжения соответственно
U,+ Ua, ;
и.
Ъ5
U
аа U36
и,6 иь
г
Эти напряжения подаются на управляющие входы второго функционального преобразователя 5: напряжение на
вход блока 37, напряжения U, U36 - на входы слагаемых соответственно суматоров 38 и 39. Блоком 37 выделяется уровень напряжения
U37 Кэиа,и19 lUKa,- КГ
- Ка, (tft),.
На выходе сумматора 38 формируется напряжение
U3a U37+ U35 ,Uw+ Uq±
,(H, + a2(2) , поступающее на вход делимого блока 4 деления.
На выходи сумматора 39 выделяется напряжение
U
зэ
U,o+ U« + U,
Э6
, + ье(г)
19
воздействующее на вход делителя блока 40 деления, выходной сигнал которого по величине равен
S.ii kljL±2i(lЈl
«40
К
аи
Uw v
- - - „ (
39
3 ,+ ь4ад
где Кл масштабный коэффициент операции деления напряжений, имеющий размерность напряжения .
Выбирая для определенности Ка К Um, видно, что полученная на выходе второго функционального преобразователя 5 величина представляе собой реализацию зависимости (2)
и40 и, ог, ,«г) |- х s
т
X,
S const - коэффициент пропорциональности (чувствительность по контро- . лируемому перемещению) , не зависящий от поперечных смещений §. При Хр переключатель 5
обеспечивает электрическое соединение выхода второго функционального преобразователя 5 с входом АЦП 8, который выдает по выходу 27 двоичный код, значения которого пропорциональ- 45 ны уровню преобразуемого АЦП 8 сигнала U,Q Ux, т.е. при нахождении цен- центра подвижного элемента I0 в пределах диапазона преобразования выходной код устройства пропорционален ™ координате X и его значения не зависят от величины поперечных смещений 8ц , поскольку от указанной зависимости избавлена величина U
выполненный в виде Ш-образного магни топровода, с тремя зубца;да на каждом из крайних стержней, обмотку возбуждения, выполненную в виде двух секций, расположенных на основании Ш-об разного магнитопровода по обе стороны от центрального стержня, и подклю ченную к источнику переменного напря жения, подвижный ферромагнитный элемент, расположенный на центральном стержне, первую обмотку считывания, расположенную на среднем зубце верхнего стержня Ш-обраэного магнитопровода и соединенную с входом первого детектора амплитуды, вторую, третью и четвертую обмотки считывания, расположенные на трех зубцах нижнего стержня Ш-образного магнитопровода и соединенные соответственно с входами второго, третьего и четвертого детек торов амплитуды, выходы второго и четвертого детекторов амплитуды соединены с неинвертирующими входами соответственно первого и второго ком параторов, источник опорного напряжения, первый функциональный преобразователь, аналого-цифровой преоб- разов ат-ель к коммутатор отличающийся тем,что, с целью повышения точности преобразователя и достоверности определения границ диапазона преобразования, в него введен второй функциональный преобразователь, выход первого детектора амплитуды соединен с первым входом первого функционального преобразователя выход второго детектора амплитуды соединен с первым входом второго функционального преобразователя, выход третьего детектора амплитуды соединен с инвертирующими входами перво го л второго компараторов, выходы которых являются контрольными выходами преобразователя и соединены с управляющими входами коммутатора, первый выход источника опорного напряжения соединен с первым информационным входом коммутатора, а второй выход соеди нен с вторым входом первого функционального преобразователя, выход которого соединен с вторым входом второго функционального преобразователя, выход которого соединен с вторым инUL(g),- SX, преобразуемая в выход- формационным входом коммутатора, вы..... .-. . « ri-XA rt r/- -Mn/ -i- /4Tir-s с- ГЧЛГТ ТТТЛТЛ f Q TT QTTfV
ной двоичный код АЦП 8,I
Формула изобретениЯ| Преобразователь перемещений в код, содержащий трансформаторный датчик,
ход которого соединен с входом аналого-цифрового преобразователя, выход которого является информационным выходом преобразователя.
0
5
0
25
30
35
40
45 ™
выполненный в виде Ш-образного магни- топровода, с тремя зубца;да на каждом из крайних стержней, обмотку возбуждения, выполненную в виде двух секций, расположенных на основании Ш-образного магнитопровода по обе стороны от центрального стержня, и подключенную к источнику переменного напряжения, подвижный ферромагнитный элемент, расположенный на центральном стержне, первую обмотку считывания, расположенную на среднем зубце верхнего стержня Ш-обраэного магнитопровода и соединенную с входом первого детектора амплитуды, вторую, третью и четвертую обмотки считывания, расположенные на трех зубцах нижнего стержня Ш-образного магнитопровода и соединенные соответственно с входами второго, третьего и четвертого детекторов амплитуды, выходы второго и четвертого детекторов амплитуды соединены с неинвертирующими входами соответственно первого и второго ком™ параторов, источник опорного напряжения, первый функциональный преобразователь, аналого-цифровой преоб- разов ат-ель к коммутатор отличающийся тем,что, с целью повышения точности преобразователя и достоверности определения границ диапазона преобразования, в него введен второй функциональный преобразователь, выход первого детектора амплитуды соединен с первым входом первого функционального преобразователя, выход второго детектора амплитуды соединен с первым входом второго функционального преобразователя, выход третьего детектора амплитуды соединен с инвертирующими входами первого л второго компараторов, выходы которых являются контрольными выходами преобразователя и соединены с управляющими входами коммутатора, первый выход источника опорного напряжения соединен с первым информационным входом коммутатора, а второй выход соединен с вторым входом первого функционального преобразователя, выход которого соединен с вторым входом второго функционального преобразователя, выход которого соединен с вторым информационным входом коммутатора, выri-XA rt r/- -Mn/ -i- /4Tir-s с- ГЧЛГТ ТТТЛТЛ f Q TT QTTfV
ход которого соединен с входом аналого-цифрового преобразователя, выход которого является информационным выходом преобразователя.
дърф
ъ у 2 у
j
огп
:
$
П
й:
t
П
V
R
L/L.ii
ж;
Ч
2 епф
Ъ 0
п
гД
г
v t
V /S /
fl
«
ЈJ
lZ
П
/ТТГЛi
;
Й
2221ZZZ,
5/
/z
Wl
Ч «
J
90 76551
| Преобразователь перемещения в код | 1985 |
|
SU1295518A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Электромагнитный преобразователь перемещения в код | 1987 |
|
SU1439736A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
