Изобретение относится к измерительной технике и может быть использовано для измерительного преобразования перемещений в электрические величины с использованием электромагнитных датчиков.
Цель изобретения - повышение точности преобразования перемещений за счет снижения температурной погрешности.
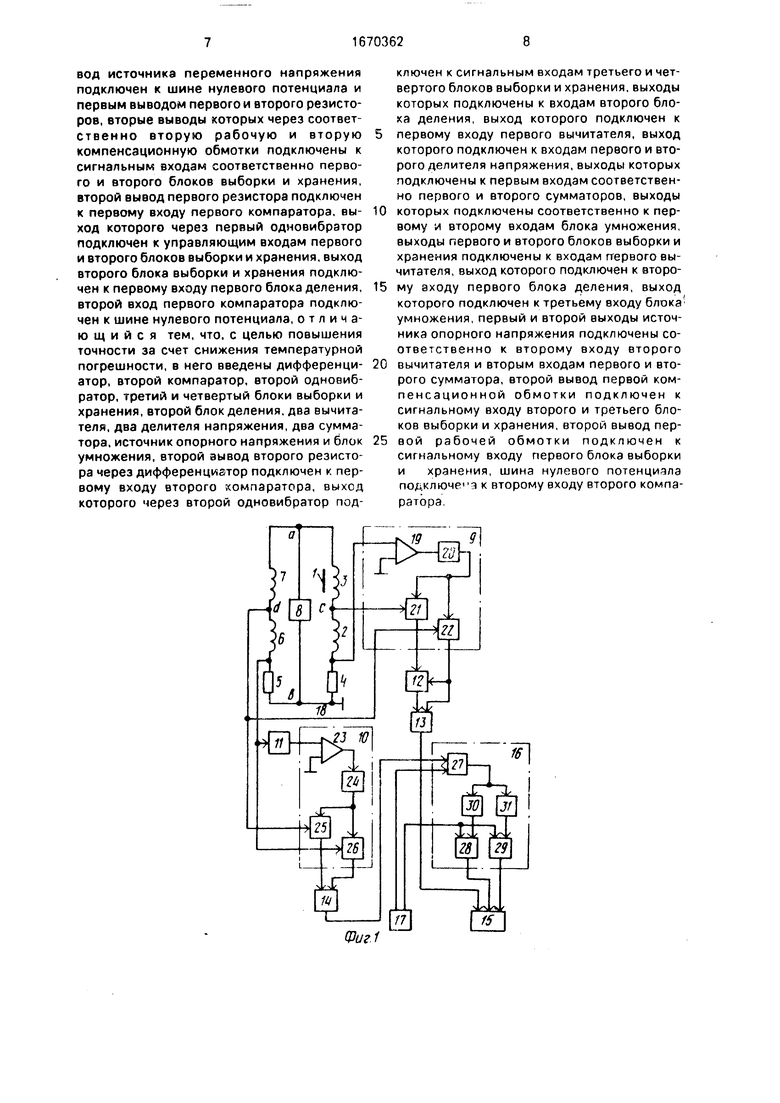
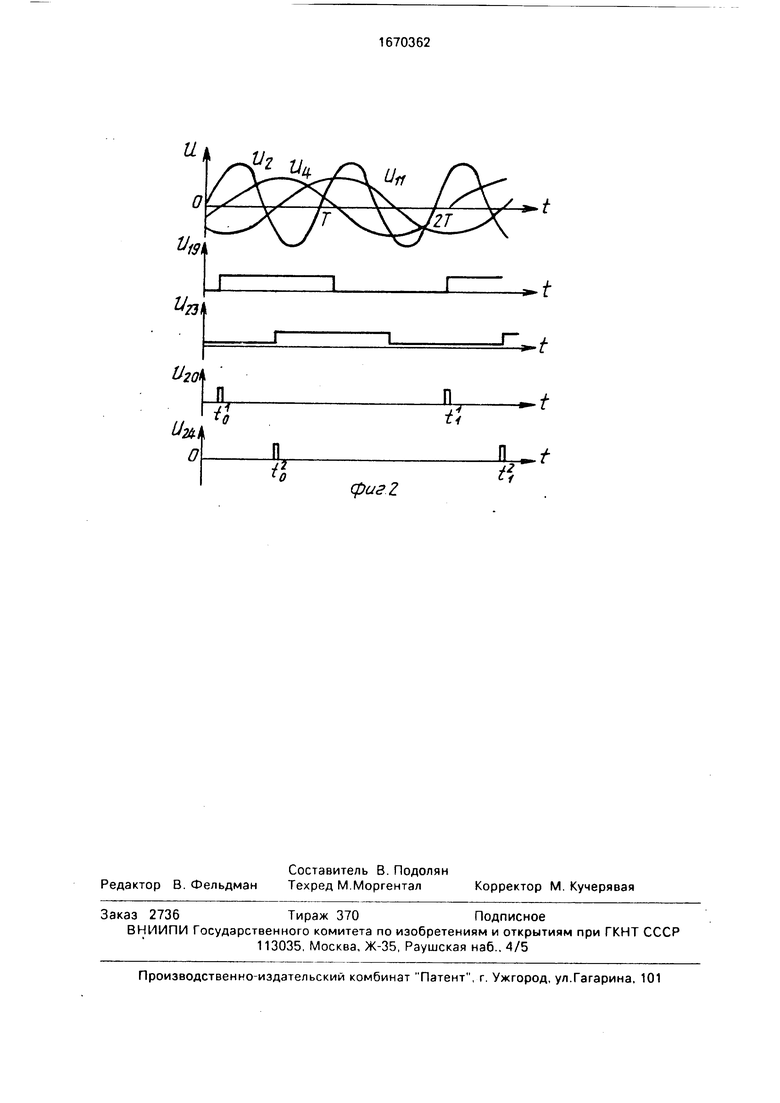
На фиг. 1 изображена структурная схема преобразователя перемещений; на фиг 2 - временные диаграммы формирования сигналов управления выборкой выходных сигналов моста переменного тока.
Преобразователь перемещений содержит магнитопроводный якорь 1, рабочие обмотки 2, 3, р.езисторы 4, 5, компенсационные обмотки 6, 7, источник 8 переменного напряжения, блоки 9, 10 дискретизации, дифференциатор 11, вычитатель 12, блоки 13, 14 деления, блок 15 умножения, блок 16 суммирования, источник 17 опорных напряжений и шину 18 нулевого потенциала.
Рабочие 2, 3 и компенсационные 6, 7 обмотки, а также резисторы 4, 5 образуют четырехплечий мост переменного тока с диагональю питания иа-он и измерительной диагональю c-d. Кроме того, якорь 1 и рабочие обмотки 2, 3 образуют дифференциальный индуктивный датчик.
Блок 9 содержит компаратор 19, одно- вибратор 20, блоки 21, 22 выборки-хранения, блок 10 содержит компаратор 23, одновибратор 24, блоки 25, 26 выборки и хранения. Блок 16 содержит блок 27 вычитания, сумматоры 28, 29, делители 30, 31 напряжения.
Нижний по фиг, 1 вывод резистора 4 связан с шиной 18, а его верхний вывод подключен к первому (верхнему по фиг.1) входу компаратора 19, второй вход компаратора 19 соединен с шиной 18. Выход компаратора 19 через одновибратор 20 связан с управляющими входами блоков 21, 22, выходы которых являются соответственно первым и вторым выходами блока 9. Выход блока 21 соединен с первым входом блока 12, ко второму входу которого подключен выход блока 22.
Устройство работает следующим образом.
К диагонали питания а-b моста переменного тока прикладывается выходное напряжение Ua источника 8
UB Vsln ом,
где V, to- амплитуда и круговая частота напряжения;
t - время.
В пределах ± Хг диапазона преобразования величины индуктивностей L.2 рабочей обмотки 2 и L3 рабочей обмотки 3 пропорциональны координатам X якоря 1 на оси X контролируемых перемещений
IX + , U -IX + L д, где I - коэффициент приращения индуктивности;
д - индуктивность балансного положения X 0 якоря 1, величины I, Ld определяется параметрами магнитных цепей рабочих обмоток 2, 3 и зависят от температуры среды зоны установки дифференциального датчика.
Управляющие и информационные входы блоков 9,10 дискретизации, а также блока 11 являются высокоимпедансными и практически не влияют на распределение токов и напряжений любых участков мостовой схемы.
Напряжение DCB, выделяемое в последовательно соединенных рабочей обмотке 2 и резисторе 4, складывается из составляющих DX и Uv, по величине пропорциональных соответственно координате X и скорости якоря 1
UCB Ux+Uv d(L2i)/dtMr+R)H
Wlm(IX+L(3)sin(abt-l+0,)+lm(IV+r+R)sin(),
где Ц
(ZwLdf +(2r + Rj рабочих и компенсацией
амплитуда тока р аЬочих компенсационных обмоток;0 I Im sin ();
р arctg Q, L 5/(2r+R) - добротность;
г - активное сопротивление каждой рабочей или компенсационной обмотки; 5 R - активное сопротивление любого из резисторов 4, 5.
Напряжение на выводах резистора 4 (см. фиг.2) равно
Щ IR ImRsin (
0 на фиг.2 через U обозначена совокупность напряжений Us, IM, Un.
Магнитные цепи компенсационных обмоток 6, 7 воздействию якоря 1 не подвергаются. В последовательном соединении 5 первой компенсационной обмотки 6 и резистора 5 выделяется сигнал, представляемый суммой падений напряжений на индуктивном и активных сопротивлениях участка d- 0 Udh U4+Ua a L д msln(u; t+
t- 0,5 )+()lm sHo/t-ip), причем напряжение на резисторе 5 равно L)5 iR ImRsin (о t-«/) Ik Уровень выходного сигнала Un блока 5 11 пропорционален временной производной напряжения Us
U1 (dU5/dt)-Kp (a Rlmcos (an-y). Состояние любого из компараторов 19, 23 определяется следующим образом; если 0 потенциал его первого выхода положителен, то на выходе данного компаратора под- держивается напряжение уровня логической единицы. Напротив, наличие отрицательного потенциала первого входа 5 обуславливает поддержание на выходе компаратора напряжения уровня логического нуля. Первый 20 и второй 24 одновибраторы срабатывают по положительным перепадам своих входных напряжений. 0 Нулевые значения достигаются напряжениями Ui, Un в моменты соответственно
+0.5КТ.Т V 0.25T, где v arctg (Q/cw), Т-(2П /ш) - период, 5 к - индекс наблюдаемого периода (целое число или нуль).
В промежутках времени
t1K (t;+ KT) t tV 0,5 Т, + 0.5Т.
г2 к (V КТ + 0,25 Г) t :2к - 0,5 Т
напряжения соответственно LM, Un находятся в области положительных значений и на выходах компараторов 19, 23 поддерживаются напряжения высокого уровня.
По положительным фронтам выходных сигналов компарторов 19, 23 в моменты времени соответственно t к, тЛк происходит срабатывание одновибрзторов 20, 24, генерирующих импульсы управления выборкой выходных напряжений моста переменного тока, производимой соответственно, блоками 9, 10 дискретизации. На выходах блоков 21. 22, 25 и 26 выборки и хранения формируются напряжения
(tV) ftJlm(IXi-L(5).
U22«Udb(t1K).
(tVlm(),
U26-U5(t2KHmR.
С выхода блока 12 снижается разностное напряжение
U12 U19-L)20 ImiX. Блоки 13. 14 реализуют операции формирования напряжений
1И2 ,, М m I X U22M wiV,L7
., I Xr - VM -L-J- Vx .
l 9S
,nfi-- VM
U25
- VM (
onepa- nanpilH + 1).
где V.ri - масштабный оэффициен ции деления, имеющий размерност жения;
/х-(Х/Хг) - относительная координата якоря 1.
Величины I. Li, r зависят от колебании температуры () в зоне установки дифференциального датч.,а
(1+ wO), Lh 1оч(Ь ) ),
Г rn(1+ttfr.60, tf-fr ft) .
где IH. L/Гн. гн значения параметров I. LJ. r при нормальной температуре 0 ц- 20°С.
ctfri, «pi, а&г известные температурные коэффициенты параметров соответственно, I, ,r. Значения а.&. определяются по результатам физического или математического моделирования воздействия температуры среды установки датчика на величину индуктивности рабочей обмотки при балансном и отклоненных от балансного положениях якоря 1, значение « известно по справочным данным
С первого выхода источника 17 выдается постоянное напряжение Uiv 1. по значению подбираемое равным Ui7-i Vm(rH/R)+1, а с его второго выхода - постоянное напряжение .
нахоний и ержи
дных ы вреходитгенеоркойного локалоковормистное
форnepa-anpiината
ании иффеI. LJ. °С.
перасоота.&. зичеванияновки бочей ых от чение
выда1. по Ui7-i - по10
15
20
25
30
35
40
45
50
55
Выходные напряжения блока 27 вычитания, сумматоров 28, 29 и делителей 30, 31 обозначим соответственно через U27...U31. Блок 27 формирует разностный сигнал, равный
14-U f + firl01 + J К
, . /ГЦvГН flQ-r- 0
- VM (- + 1) VM --р.
Коэффициент преобразования Дю делителя 30 подбирается равным значению отношения ()/(rzЈt гн), а коэффициент преобразования Дл делителя 31 - равным значению отношения (а#|)/() так что
изо / 30 U27()/( гн)
О,
U27(U27 aor R)/ ( aer-гц) fj .
При этом соотношение (R/гн) подбирается таким, чтобы соблюдалось неравенство тах( ,/Зз1 ) 1, в случае нарушения которого вместо делителя напряжения пришлось бы использовать усилитель.
Сумматоры 28, 29 реализуют операции ело е н и я
U28 Ul7-: U30 Vm(1+ «01 6)
U29-Ul7-2 + U31-V,n(l+ ««ц
вровень выходного напряжения блока 15 определяется выражением
Ul5-(Kl5 U28/U29)Kif, X Vm Ji1 ( j ) ин( -О Х
VM (1
у X
VMf /Цн) /x - KX,
где KIS масштабный коэффициент операции v множен и ч-делен ия напряжений,
K(«15 Vm 1н)/1-5н.
Таким образом, выходная величина Uis предлагаемого преобрази вате л я-пропорциональна координатам якоря 1 на оси контролируемых перемещений с постоянным коэффициентом К.
Формула изобретения
Преобразователь перемещений, содержащий источник переменного напряжения, две рабочие обмотки две компенсационные обмотки, два резистора, первый компартор, первый одновибратор, первый и второй блоки выборки и хранения, первый блок деления, шину нулевого потенциала и магнитопроводный якорь, выполненный с возможностью перемещения в магнитном поле рабочих обмоток, первый вывод источника переменного напряжения подключен к началу первой компенсационной обмотки и началу первой рабочей обмотки, второй i f 4 fL v
вод источника переменного напряжения подключен к шине нулевого потенциала и первым выводом первого и второго резисторов, вторые выводы которых через соответственно вторую рабочую и вторую компенсационную обмотки подключены к сигнальным входам соответственно первого и второго блоков выборки и хранения, второй вывод первого резистора подключен к первому входу первого компаратора, вы- ход которого через первый одновибрэтор подключен к управляющим входам первого и второго блоков выборки и хранения, выход второго блока выборки и хранения подключен к первому входу первого блока деления, второй вход первого компаратора подключен к шине нулевого потенциала, отличающийся тем, что, с целью повышения точности за счет снижения температурной погрешности, в него введены дифференци- атор, второй компаратор, второй одновиб- ратор, третий и четвертый блоки выборки и хранения, второй блок деления, два вычита- теля, два делителя напряжения, два сумматора, источник опорного напряжения и блок умножения, второй вывод второго резистора через дифференциатор подключен к первому входу второго компаратора, выход которого через второй одновибратор подключен к сигнальным входам третьего и четвертого блоков выборки и хранения, выходы которых подключены к входам второго блока деления, выход которого подключен к первому входу первого вычитателя, выход которого подключен к входам первого и второго делителя напряжения, выходы которых подключены к первым входам соответственно первого и второго сумматоров, выходы которых подключены соответственно к первому и второму входам блока умножения, выходы первого и второго блоков выборки и хранения подключены к входам ггервого вычитателя, выход которого подключен к второму входу первого блока деления, выход которого подключен к третьему входу блока умножения, первый и второй выходы источника опорного напряжения подключены соответственно к второму входу второго вычитателя и вторым входам первого и второго сумматора, второй вывод первой компенсационной обмотки подключен к сигнальному входу второго и третьего блоков выборки и хранения, второй вывод первой рабочей обмотки подключен к сигнальному входу первого блока выборки и хранения, шина нулевого потенциала подключе1 к второму входу второго компаратора
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещений | 1987 |
|
SU1441175A1 |
| Преобразователь перемещений | 1990 |
|
SU1768935A1 |
| Способ преобразования перемещений и устройство для его осуществления | 1988 |
|
SU1518661A1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2121129C1 |
| Преобразователь параметров индуктивного датчика | 1989 |
|
SU1677658A1 |
| Преобразователь угол-код | 1987 |
|
SU1474844A2 |
| Устройство для измерения моментаНАгРузКи элЕКТРОдВигАТЕля пО-СТОяННОгО TOKA | 1977 |
|
SU808886A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2366892C1 |
| Преобразователь угловых перемещений | 1987 |
|
SU1543223A1 |
| Устройство усреднения | 1983 |
|
SU1100713A1 |
Изобретение относится к технике измерений и может быть использовано для измерительного преобразования механических величин с использованием электромагнитных датчиков. С целью повышения точности за счет снижения температурной погрешности преобразователь перемещений содержит мост переменного тока, образованный рабочими обмотками 2, 3 индуктивного дифференциального датчика, а также компенсационными обмотками 6, 7 и резисторами 4, 5. Мост переменного тока через блок 9 дискретизации связан со входом делителя 13. Новым в преобразователе перемещений является введение блока 10 дискретизации, связывающего мост переменного тока со входами блока 14 деления, введение блока 12 вычитания, связывающего блок 9 дискретизации со входом делимого блока 13 деления, причем выход блока 13 деления непосредственно, а выход блока 14 деления через блок 16 масштабного суммирования, подключенный к источнику 17 опорных напряжений, связаны со входами блока 15 умножения. На выходе блока 9 дискретизации выделяется напряжение, по уровню пропорциональное координате подвижного якоря 1 дифференциального датчика, причем коэффициент пропорциональности определяется элементами датчика и является температурозависимым. Блок 10 дискретизации формирует информацию о температуре дифференциального датчика, преобразуемую блоком масштабного суммирования к виду, обеспечивающему компенсацию температурных изменений выходной величины блока 9 дискретизации. 2 ил.
Фиг1
| Способ преобразования перемещений и устройство для его осуществления | 1983 |
|
SU1146540A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь перемещений | 1987 |
|
SU1441175A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
