Фиг.1
тикальной и горизонтальной плоскостях. При этом СМ 3 имеет поворотную стойку, которая соответственно шарнирно закреплена на конце СМ 3 и связана с рукоятью 8. При уборке породы в процессе обнаружения кровли бурильное оборудование подается по направляющей 6 вперед и устанавливается в положение Бурение шпуров под анкеры.
После раскрепления ПБ 4 в забое СМ 3 и тележка 2 переводятся в плавающее положение, что обеспечивает возможность бурения анкерных шпуров с одновременной уборкой породы с помощью ПМ 1 . Перемещение машины 5 с. податчи- ком по ширине выработки осуществляется кареткой 11 и перемещением корпуса ПБ 4. 1 з.п. ф-лы, 5 ил.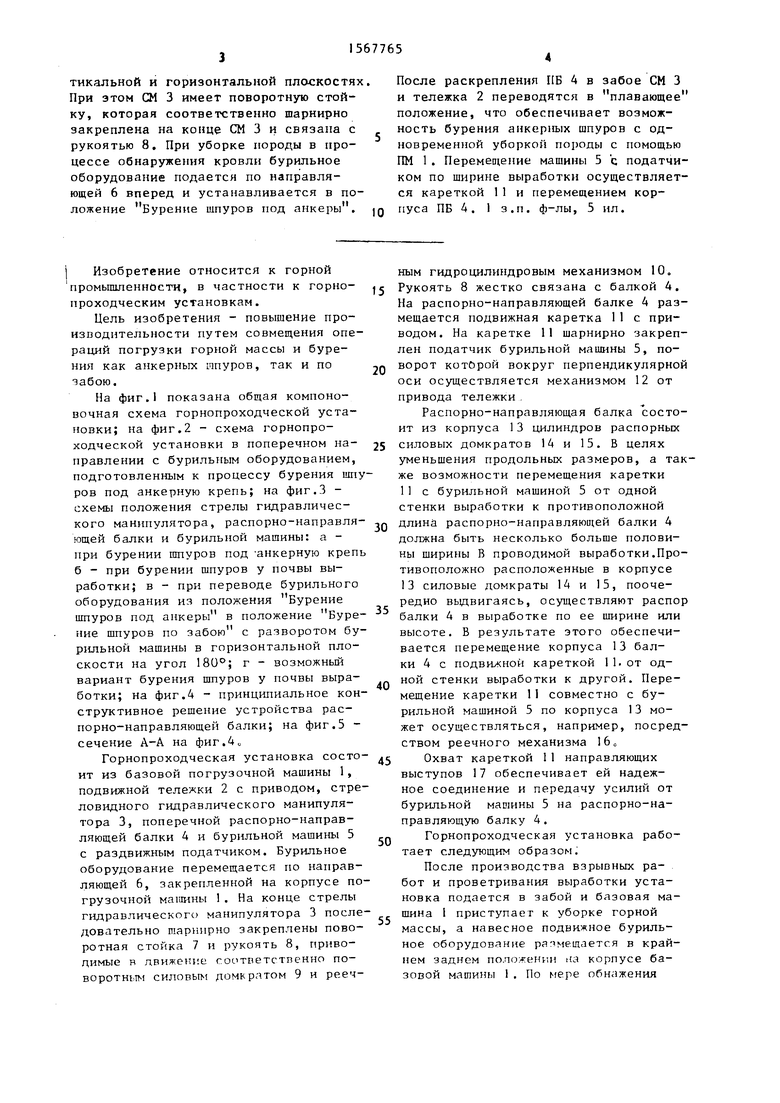
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОХОДЧЕСКИЙ КОМПЛЕКС | 1990 |
|
RU2006584C1 |
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1992 |
|
RU2026982C1 |
| Агрегат для проведения выработок большого сечения | 1979 |
|
SU911038A1 |
| СИСТЕМА ГОРНОПРОХОДЧЕСКИХ МАШИН | 1997 |
|
RU2144139C1 |
| ПРОХОДЧЕСКИЙ КОМПЛЕКС | 1998 |
|
RU2172405C2 |
| Проходческий щит | 1980 |
|
SU905476A1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
| Устройство для проходки вертикальных стволов | 1980 |
|
SU960440A1 |
| СИСТЕМА ГОРНОПРОХОДЧЕСКИХ МАШИН | 1998 |
|
RU2148715C1 |
| Проходческий взрывонавалочный комплекс | 2018 |
|
RU2700388C1 |
Изобретение относится к горной промышленности. Цель изобретения - повышение производительности путем совмещения операций погрузки горной массы и бурения, как анкерных шпуров, так и по забою. Установка содержит базовую погрузочную машину /ПМ/ 1, стреловидный манипулятор (СМ) 3, связанный с имеющей привод тележкой 2, которая расположена с возможностью поступательного перемещения по направляющей 6, закрепленной на корпусе ПМ 1. На конце СМ 3 шарнирно закреплена рукоять 8 с приводом, связанная жестко с поперечной балкой (ПБ) 4. С возможностью перемещения вдоль ПБ 4 на ней размещена каретка 11 с шарнирно закрепленным податчиком бурильной машины 5. Выполнена ПБ 4 с распорными силовыми домкратами. Корпус балки 4 выполнен с возможностью совместного перемещения с бурильной машиной 5 относительно машины 1 в вертикальной и горизонтальной плоскостях. При этом СМ 3 имеет поворотную стойку, которая соответственно шарнирно закреплена на конце СМ 3 и связана с рукоятью 8. При уборке породы в процессе обнаружения кровли бурильное оборудование подается по направляющей 6 вперед и устанавливается в положение "бурение шпуров под анкеры". После раскрепления ПБ 4 в забое СМ 3 и тележка 2 переводятся в "плавающее" положение, что обеспечивает возможность бурения анкерных шпуров с одновременной уборкой породы с помощью ПМ 1. Перемещение машины 5 с податчиком по ширине выработки осуществляется кареткой 11 и перемещением корпуса ПБ 4. 1 з.п. ф-лы, 5 ил.
Изобретение относится к горной промышленности, в частности к горнопроходческим установкам.
Цель изобретения - повышение производительности путем совмещения операций погрузки горной массы и бурения как анкерных шпуров, так и по забою.
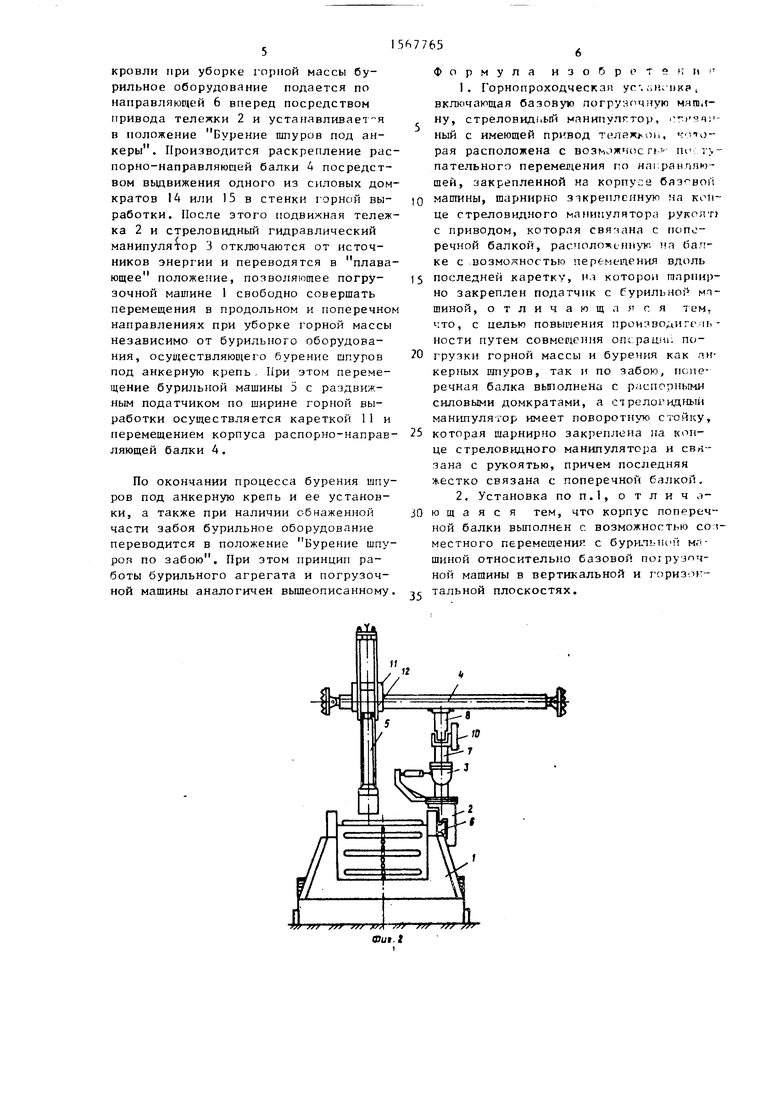
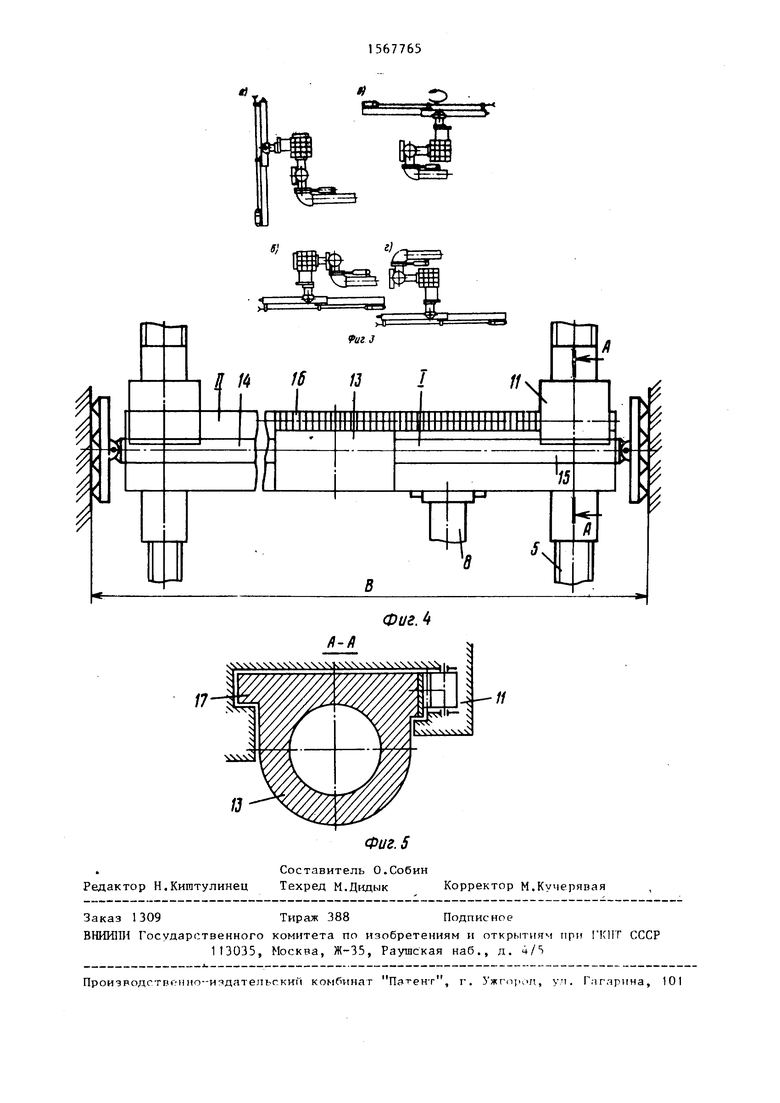
На фиг. I показана общая компоновочная схема горнопроходческой установки; на фиг.2 - схема горнопроходческой установки в поперечном направлении с бурильным оборудованием, подготовленным к процессу бурения шпуров под анкерную крепь; на фиг.З - схемы положения стрелы гидравлического манипулятора, распорно-направляющей балки и бурильной машины: а - при бурении шпуров под анкерную крепь б - при бурении шпуров у почвы выработки; в - при переводе бурильного оборудования из положения Бурение шпуров под анкеры в положение Бурение шпуров по забою с разворотом бурильной машины в горизонтальной плоскости на угол 180°; г - возможный вариант бурения шпуров у почвы выработки; на фиг.4 - принципиальное конструктивное решение устройства распорно-направляющей балки; на фиг.5 - сечение А-А на фиг.40
Горнопроходческая установка состоит из базовой погрузочной машины 1, подвижной телелки 2 с приводом, стреловидного гидравлического манипулятора 3, поперечной распорно-направляющей балки 4 и бурильной машины 5 с раздвижным податчиком. Бурильное оборудование перемещается по направляющей 6, закрепленной на корпусе погрузочной машины 1. На конце стрелы гидравлического манипулятора 3 последовательно шарнирно закреплены поворотная стойка 7 и рукоять 8, приводимые в движение соответственно по- воротштм силовым домкратом 9 и рееч5
0
5
0
5
0
5
0
5
ным гидроцилиндровым механизмом 10. Рукоять 8 жестко связана с балкой 4. На распорно-направляющей балке 4 размещается подвижная каретка 11 с приводом. На каретке 11 шарнирно закреплен податчик бурильной машины 5, поворот которой вокруг перпендикулярной оси осуществляется механизмом 12 от привода тележки
Распорно-направляющая балка состоит из корпуса 13 цилиндров распорных силовых домкратов 14 и 15. В целях уменьшения продольных размеров, а также возможности перемещения каретки 11 с бурильной машиной 5 от одной стенки выработки к противоположной длина распорно-направляющей балки 4 должна быть несколько больше половины ширины В проводимой выработки.Противоположно расположенные в корпусе 13 силовые домкраты 14 и 15, поочередно выдвигаясь, осуществляют распор балки 4 в выработке по ее ширине или высоте. В результате этого обеспечивается перемещение корпуса 13 балки 4 с подвихной кареткой 11. от одной стенки выработки к другой. Перемещение каретки 11 совместно с бурильной машиной 5 по корпуса 13 может осуществляться, например, посредством реечного механизма 160
Охват кареткой 11 направляющих выступов 17 обеспечивает ей надежное соединение и передачу усилий от бурильной машины 5 на распорно-направляющую балку 4.
Горнопроходческая установка работает следующим образом.
После производства взрывных работ и проветривания выработки установка подается в забой и базовая машина 1 приступает к уборке горной массы, а навесное подвижное бурильное оборудование размещается в крайнем заднем поношении iia корпусе базовой машины 1. По мере обнажения
кровли при уборке горной массы бурильное оборудование подается по направляющей 6 вперед посредством привода тележки 2 и устанавливает-я в положение Бурение шпуров под анкеры. Производится раскрепление распорно-направляющей балки 4 посредством выдвижения одного из силовых домкратов 14 или 15 в стенки горной выработки. После этого подвижная тележка 2 и стреловидный гидравлический манипулятор 3 отключаются от источников энергии и переводятся в плавающее положение, позволяющее погрузочной машине 1 свободно совершать перемещения в продольном и поперечном направлениях при уборке горной массы независимо от бурильного оборудования, осуществляющего бурение шпуров под анкерную крепь, При этом перемещение бурильной машины 5 с раздвижным податчиком по ширине горной выработки осуществляется кареткой 11 и перемещением корпуса распорно-направляющей балки 4.
По окончании процесса бурения шпуров под анкерную крепь и ее установки, а также при наличии обнаженной части забоя бурильное оборудование переводится в положение Бурение шпу- роя по забою. При этом принцип работы бурильного агрегата и погрузочной машины аналогичен вышеописанному.
0
0
5
O
5
Формула и з о 5 р с т е ч и
I. Горнопроходческая уг-. .лкчжя , включающая базовую погрузочную м.чшл- ну, стреловидный манипулгтор, i- - °4i - ный с имеющей привод т у л е жми., ч-ito- рая расположена с возможноепv m т нательного перемел4ения го на ран пню- шей, закрепленной на корпусе базовой машины, шарннрно закрепленную на конце стреловидного манипулятора руке;гп с приводом, которая связана с поперечной балкой, расположенную ма бачке с возможностью перемещения вдоль последней каретку, нл которой гаарпнр- но закреплен податчик с бурильной мч- шиной, отличающаяся тем, что, с целью повышения производите ib- ности путем совмещения операции погрузки горной массы и бурения как анкерных шпуров, так и по забою, поперечная балка выполнена с распорными силовыми домкратами, а стрелогидныи манипулятор имеет поворотную стойку, которая шарнирно закреплена на конце стреловидного манипулятора и сви-- зана с рукоятью, причем последняя жестко связана с поперечной балкой
2, Установка по п.1, о т л и ч о- ю щ а я с я тем, что корпус ной балки выполнен с возможностью со - местного перемещения с бурильном шиной относительно базовой погрузочной машины в вертикальной и горизонтальной плоскостях.
Й-А
/J
ФигЛ
| Горный комбайн | 1972 |
|
SU555225A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Горная машина | 1972 |
|
SU470611A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
