31
закрепленную на зеркале б, плоскость которого перпендикулярна оси маятника. Отразившись от зеркала 6,свет проходит в обратном направлении до полупрозрачного зеркала светоделителя 2 и поступает на фотоприемник 8. Если маятник отклоняется от вертикали, то интенсивность света изменяется и на выходе фотоприемника 8 появляется сигнал с частотой 2W, фаза которого зависит от направления поворота объекта. Этот сигнал через ре695444
зонансный усилитель 9 поступает на фазовый детектор 10, в котором с помощью опорной частоты от генератора 14 выделяется напряжение,пропорцио- нальное углу наклона объекта, которое поступает на управляемый блок питания 11, где преобразуется в сигнал для индикатора 15 и подается на сум- .- матор 12, который суммирует напряжение с масштабного усилителя 13,пропорциональное влиянию ускорения и других факторов. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптическое множительное устройство | 1980 |
|
SU984333A1 |
| Устройство для измерения углов скручивания | 1976 |
|
SU569849A1 |
| Устройство для определения поперечных смещений объекта | 1991 |
|
SU1793205A1 |
| Устройство для определения поперечных смещений | 1986 |
|
SU1432334A1 |
| Устройство для измеренияуглОВ СКРучиВАНия | 1979 |
|
SU794373A2 |
| Устройство для исследования поляризационных свойств анизотропных материалов | 1982 |
|
SU1045004A1 |
| ИЗМЕРИТЕЛЬ ТОКА ОПТИЧЕСКИЙ ИНТЕРФЕРЕНЦИОННЫЙ | 2021 |
|
RU2767166C1 |
| Поляриметр | 1982 |
|
SU1139976A1 |
| Устройство для измерения остаточных напряжений в стекле | 1990 |
|
SU1772087A1 |
| Оптико-электронный преобразователь угла поворота в электрический сигнал | 1985 |
|
SU1303818A1 |
Изобретение относится к области инженерной геодезии, в частности к автоматизации измерений взаимных превышений точек местности. Цель изобретения - повышение точности за счет исключения ошибок от ускорения. Излучение от лазера 1, направленное по оси маятника 7 с демпфером 16, через светоделитель 2 попадает на поляризатор-анализатор 3, где линейно поляризуется с нулевым азимутом, и проходит через модулятор 4, заключенный между двумя четверть волновыми пластинами и на обкладки которого поступают напряжения с сумматора 12 и переменное через конденсатор от генератора 14 на четвертьволновую пластину 5, жестко закрепленную на зеркале 6, плоскость которого перпендикулярна оси маятника. Отразившись от зеркала 6, свет проходит в обратном направлении до полупрозрачного зеркала светоделителя 2 и поступает на фотоприемник 8. Если маятник отклоняется от вертикали, то интенсивность света изменяется и на выходе фотоприемника 8 появляется сигнал с частотой 2 ω, фаза которого зависит от направления поворота объекта. Этот сигнал через резонансный усилитель 9 поступает на фазовый детектор 10, в котором с помощью опорной частоты от генератора 14 выделяется напряжение, пропорциональное углу наклона объекта, которое поступает на управляемый блок питания 11, где преобразуется в сигнал для индикатора 15 и подается на сумматор 12, который суммирует напряжение с масштабного усилителя 13, пропорциональное влиянию ускорения и других факторов.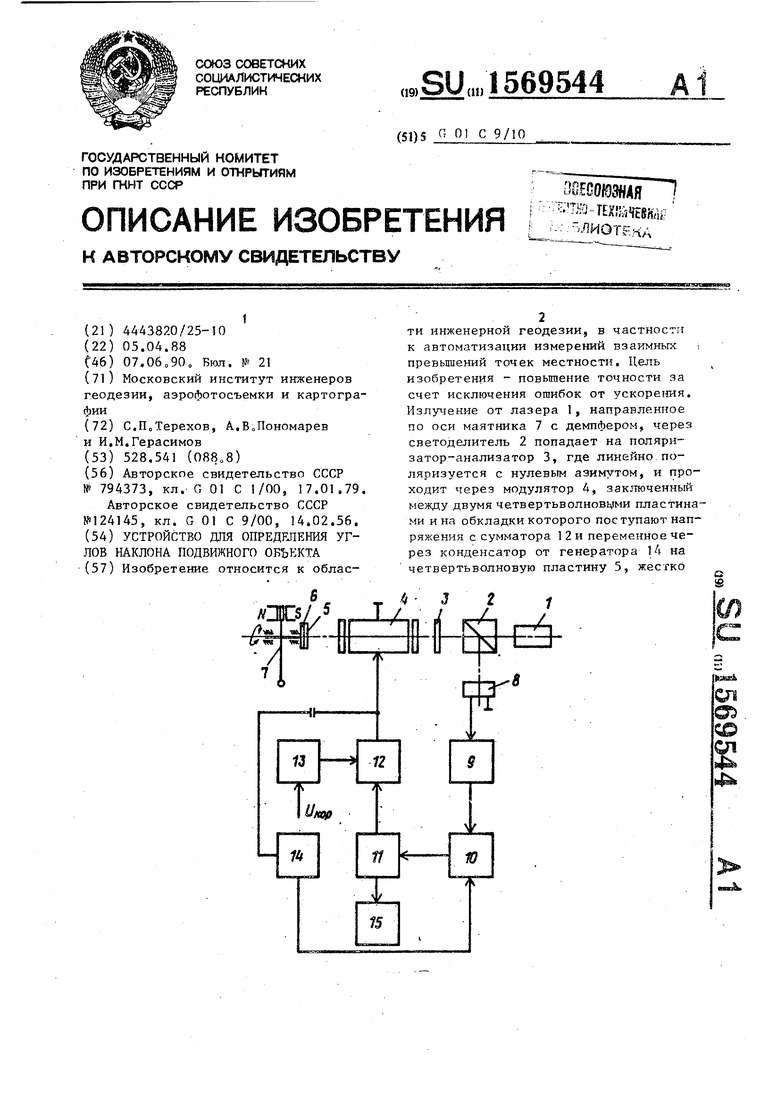
Изобретение относится к инженерной геодезии и может быть использова- но в комплексе высотомера-автомата при автоматизированном измерении взаимных превышений точек местности в составе подвижных средств.
Целью изобретения является повы- шение точности за счет исключения ошибок от ускорения0
На чертеже изображена схема предлагаемого устройства.
Устройство для определения угло- вого положения маятника содержит расположенные на одной оптической оси. лазерный источник 1 излучения,светоделитель 2 каналов, поляризатор-анализатор 3, модулятор 4, размещённый между двумя фазовыми четвертьволновыми пластинами (не показаны), фазовую четвертьволновую пластину 5, жестко закрепленную на зеркале 6, установленном на оси маятника 7 и перпенди- кулярном ейо
С другой стороны светоделителя 2 каналов расположен фотоприемник 8, последовательно соединенный с резонансным усилителем 9, фазовым детек- тором 10, управляемым блоком 11 питания а другой - с сумматором 12,второй вход которого .соединен с масштабным усилителем 13, а выход - с модулятором 4, который через конденсатор соединен с генератором 14. Индикатор 15 соединен с управляемым блоком I1 питания,,
Устройство работает следующим образом,,
Световой пучок от лазера, пройдя светоделитель 2 каналов,, попадает на поляризатор-анализатор 3, линейно поляризуется с азимутом & 0 (в
о
5 -.
5
плоскости XOZ) и поступает на модулятор 4, выполненный на основе ячейки Поккельса, заключенной между двумя фазовыми четвертьволновыми пластинами. После модулятора световой пучок проходит четвертьволновую пластину 5 и, отразившись от зеркала 6, проходит четвертьволновую пла-с- тину 5 в обратном ходе. Если оси пластины 5 расположены под углом 45 к вектору линейнополяризованного света, то выходящий световой пучок линейно поляризован с азимутом о 90 , так как сумма двух фазовых четвертьволновых пластин с одинаковым направлением главных осей работает как фазовая полуволновая пластина „ Далее световой пучок, пройдя в обратном ходе модулятор 4, попадает на поляризатор-анализатор 3 и,: пройдя его, отражается от полупрозрачного зеркала светоделителя 2 каналов и попадает на фотоприемник 8, Так как азимут оси наибольшего пропускания анализатора поляризатора 2od 0, а азимут поступающего на него линейно поляризованного света d 90 , то на фотоприемнике 8 интенсивность света . Если маятник 7 (устройства) отклоняется от вертикали и тем самым поворачивает четвертьволновую пластину 5 с зеркалом 6 на угол Ј/3 , то азимут линейно поляризованного света становится равным рб (90°±2р),а интенсивность света на фотоприемнике отлична от нуля и равна I I0cos (90в± 2/3).
При динамическом режиме работы, когда угол поворота маятников /3 0 и модулятор-компенсатор 4 качает плоскость поляризации падающего на
него линейно поляризованного света на угол у в плоскости YOZ, с фотоприемника 8 снимается сигнал с частотой 2и. Если р Ј 0, то снимается сигнал с частотой 26), фаза которого зависит от направления поворота, а амплитуда сигнала - от величины угла JJ , Сигнал с фотоприемника 8 подается на резонансный усилитель 9,настроенный на частоту СО и пропускающий усиленные колебания с данной частотой на фазовый детектор 10, при этом опорное напряжение на фазовый детектор 10 подается с опорного генератора 14, После фазового детектора 10 сигнал поступает на управляемый блок 11 питания. Последний через сумматор 12 изменяет напряжение на обкладках модулятора 4 так, что поворот вектора поляризации из-за наклона маятника 7 компенсируется, и азимут поляризации на выходе модулятора 4 вновь становится - 90°, т.е. интенсивность на фотоприемнике 8 равна I 0.
Если в ходе измерений возникает ошибка за счет ускорения, то напряжение коррекции с датчиков ускорения (не показан) подается через масштабный усилитель 13 на сумматор 12, где складывается алгебраически с напряжением компенсации и поступает на модулятор 4.
Это приводит к изменению азимута оЈ( линейно поляризованного света после модулятора-компенсатора 4 на угол, равный, но с обратным знаком, углу коррекции.
Напряжение компенсации без учета напряжения корректирующего сигнала с управляемого блока 11 питания подается на стрелочный индикатор 15.
Редактор И.Горная
Составитель В.Попов Техред Л.Сердюкова
Заказ 1436
Тираж 399
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
0
5
0
5
0
5
0
Формула изобретения
Устройство для определения углов наклона подвижного объекта, содержащее маятник с демпфером и осью вращения, источник света с оптической осью, фотоприемник и блок обработки информации, отличающееся тем, что, с целью повышения точности за счет уменьшения влияния ошибок, обусловленных действием динамических нагрузок, в него введены резонансный усилитель, детектор, управляющий бло#, сумматор, масштабный усилитель, опорный генератор, индикатор,конденсатор и установленные на оптической оси источника света, совмещенной с осью вращения маятника, последовательно расположенные после источника света светоделитель, поляризатор- анализатор, первая четвертьволновая пластина, электрооптический модулятор, вторая четвертьволновая пластина, третья четвертьволновая пластина, жестко связанная с зеркалом, закрепленным на маятнике в плоскости, перпендикулярной оси маятника, причем вход фотоприемника через светоделитель сопряжен с поляризатором- анализатором, а выход через резонансный усилитель - с первым входом детектора,второй вход которого соединен с первым выходом генератора, а выход - с входом управляющего блока, первый выход которого соединен с индикатором, а второй выход - с первым входом сумматора, второй вход которого соединен с масштабным усилителем, выход соединен с электрооптическим модулятором и через конденсатор с вторым выходом опорного генератора, а вход масштабного усилителя подключен к введенному датчику ускорения.
Корректор М.Пожо
Подписное
| Устройство для измеренияуглОВ СКРучиВАНия | 1979 |
|
SU794373A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для автоматического нивелирования местности | 1956 |
|
SU124145A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
