Изобретение относится к информационно-измерительной технике и может найти применение для автоматического контроля цифровых измерительных приборов (ЦИП) с жидкокристаллическими, светодиодными, люминесцентными или неоновыми индикаторными табло.
Цель изобретения - расширение области применения и повышение производительности контроля путем автоматизации контроля исправности индикаторного табло.
На чертеже приведена схема устройства для реализации предлагаемого способа.
Устройство состоит из кодоуправ- ляемого источника 1 эталонных сигналов , подключенного к поверяемому лрибору 2, причем переключение источника производится по командам управляющей вычислительной машины 3 (УВМ). Передающая телевизионная камера 4 считывает изображение индикаторного табло поверяемого прибора и через фильтр-компенсатор 5 фоновых помех передает видеосигнал на квантователь 6, который преобразует полутоновое изображение в двухградационное. С помощью блока .7 координат измеряется положение фрагментов.образов в поле телевизионного кадра, а через коммутатор 8, управляемый ЭВМ, координаты необходимых фрагментов изображения вводятся в ОЗУ 9 вычислительной машины. Протокол поверки выводится на печатающий блок 10.
О1
о со
-4 О1 1
Предлагаемый способ реализуется в устройстве следующим образом,
УБМ 3 подает код, соответствующий эталонному значению измеряемой вели- чины, на источник измерительного сигнала. Изображение табло прибора 2 с индикацией результата измерения проецируется на фоточувствительный элемент телекамеры, которым может быть как ФСЗС, так и электронно-лучевая трубка. Сканирование изображения осуществляется построчно обычным для данного типа фотопреобразователя способом. С целью расширения динамичес- / кого диапазона видеосигнала и повышения помехоустойчивости считывающего устройства между выходом телекамеры и входом квантователя сигнала включен рекурсивный фильтр-компенсатор фоно- вых искажений. Такая фильтрация устраняет влияние неравномерности осве- |щения объекта считывания, нелинейности свет-сигнальной характеристики по полю кадра датчика изображения и ос- нована на усреднении (Зюновой составляющей видеосигнала с помощью линий задержки и аналоговых сумматоров, Квантователь 6 уменьшает информационную избыточность видеосигнала путем разделения его на два уровня, т.е. преобразует полутоновое изображение в двухградационное. В качестве квантователя можно использовать любое быстродействующее пороговое устрой- .ство.
После аналоговой обработки видеосигнала в блоке 7 координат производится измерение координат информатив- ных фрагментов образов цифр. Для этого последовательные отсчеты квантованного видеосигнала формируются в двоичные кодовые слова, формат которых совпадает с разрядной сеткой УВМЗ. В ОЗУ 9-через коммутатор 8, управляемый ЭВМ, записываются сгруппированные в слова отсчеты видеосигнала Коммутатор 8 синхронизирует работу источника информации (камеры) и при- емника информации (ОЗУ) выделением информативной части кадра, на которую проецируется контролируемое табло, выбором информативных строк кадра (например, каждой второй или каждой пятой) в зависимости от разрешающей способности камеры по вертикали и относительных размеров проекции индикатора ЦВД.
Таким образом, по окончании считывания в последовательно расположенных ячейках ОЗУ помещаются отсчеты видеосигнала на информативных строках; каждый отсчет представляется одним битом причем отсчетам видеосигнала, превышающим пороговое значение, присваивается состояние J, а не превышающие порог отсчеты сигнала приравниваются к О.
Последующая цифровая обработка считанного изображения начинается с программной коррекции ошибок считывания, вызванных флуктуациями и проколами видеосигнала. Для этого в считанном изображении выделяется окно размером отсчета и в нем подсчитывается количество единичных элементов. Если их больше четырех, то центральный элемент окна приравнивается 1 (заполняется); циклически производится перебор всех возможных положений анализирующих окон.
Индикаторное табло проверяемого ЦИП может быть установлено перед объективом камеры с некоторым перекосом относительно оси кадра. Для коррекции такого наклона находятся крайние левая и правая верхние точки изображения, т.е. производится диагональный просмотр считанного массива, вычисляется угол наклона табло относительно оси кадра и исходный массив переписывается с учетом наклона изображения.
Далее нормализованное изображение разделяется на информативные фрагменты по количеству знаков индикации, в каждом фрагменте выделяются информативные зоны, относящиеся к характерным особенностям символов - вертикальным и горизонтальным штрихам абрисов цифр индикации. Поскольку относительные размеры каждого знака индикации известны, для разделения на фрагменты нужно распознать характерную (опорную) точку нормализованного изображения и по ее координатам определить фрагменты кадра, относящиеся к каждому символу индикации. В качестве такой опорной точки следует использовать правую верхнюю точку изображения символа младшего разряда индикаторного табло ЦИП, которая содержит информативную зону при индикации любой цифры.
По окончании предварительной обработки производится кодирование информативных зон, отнесенных к каждому символу, для чего все информативные зоны нумеруются и в код распознаваемого символа вносятся номера зон, имеющих темное изображение, а .код каждого символа представляется несколькими машинными словами.
На этапе распознавания цифр каждый код символа последовательно сравнивается с элементами алфавита распознаваемых символов, хранящихся в памяти ЭВМ. При совпадении кода символа с каким-либо элементом принимается решение о соответствии значения символа данному элементу алфавита. В случае, если для какого-то разряда не найдено соответствующего ему элемента алфавита, на печатающий блок 10 выводится сообщение о неисправности индикатора ПИП,
После распознавания всех символов формируется считанное значение измеряемой величины, которое сравнивается с эталонным значением сигнала, поданного на вход ЦИП, и вычисляется приведенная погрешность прибора в данном диапазоне измеряемой величины. Такая процедура повторяется для всех контролируемых точек диапазона в соответствии с существующей для каждого типа прибора методикой и принимается решение о годности проверяемого ЦИП к эксплуатации путем сравнения вычисленного значения погрешности с граничным значением для приборов данного класса точности.
. Введение автоматического считывания показаний непосредственно с индикаторного табло ЦИП, в отличие от известного способа,позволяет, сохраняя преимущества автоматизированной поверки, осуществлять автоматический визуальный контроль индикаторов, что снижает вероятность неверного контроля из-за субъективных ошибок оператора, повышает производительность по-
0
5
0
5
0
5
0
5
верки и расширяет функциональные возможности автоматизированных систем поверки ЦИП.
Формула изобретения
Способ контроля цифровых измерительных приборов путем подачи на поверяемый прибор измерительного сигнала, считывания показаний контролируемого прибора, вычисления его погрешности, сравнения вычисленного значения погрешности с границами допуско- вото интервала, принятия решения о годности прибора, отличающийся тем, что, с целью расширения области применения и повышения производительности контроля путем автоматизации контроля исправности индикаторного табло, производят считывание показаний с помощью передающей телекамеры, кодируют изображение табло путем компенсации фоновых искажений видеосигнала и преобразования полутонового изображения лз двухграда- ционное, запоминают кодированное изображение индикаторного табло и распознают буквенно-цифровые символы индикации результата измерения путем фильтрации считанного изображения, заполнения пустот внутри замкнутого образа, вызванных одиночными сбоями считывающего телевизионного устройства, поиска крайних точек изображения и коррекции его наклона, выделения абрисов символов индикации результата измерения, сравнения абрисов выделенных символов с алфавитом распознаваемых символов, последовательно принимают решения о значении каждого символа индикации результата измерения с выдачей сигнала отказа от распознавания в случае несовпадения .абриса какого-либо символа с одним из элементов алфавита распознаваемых символов.
, 3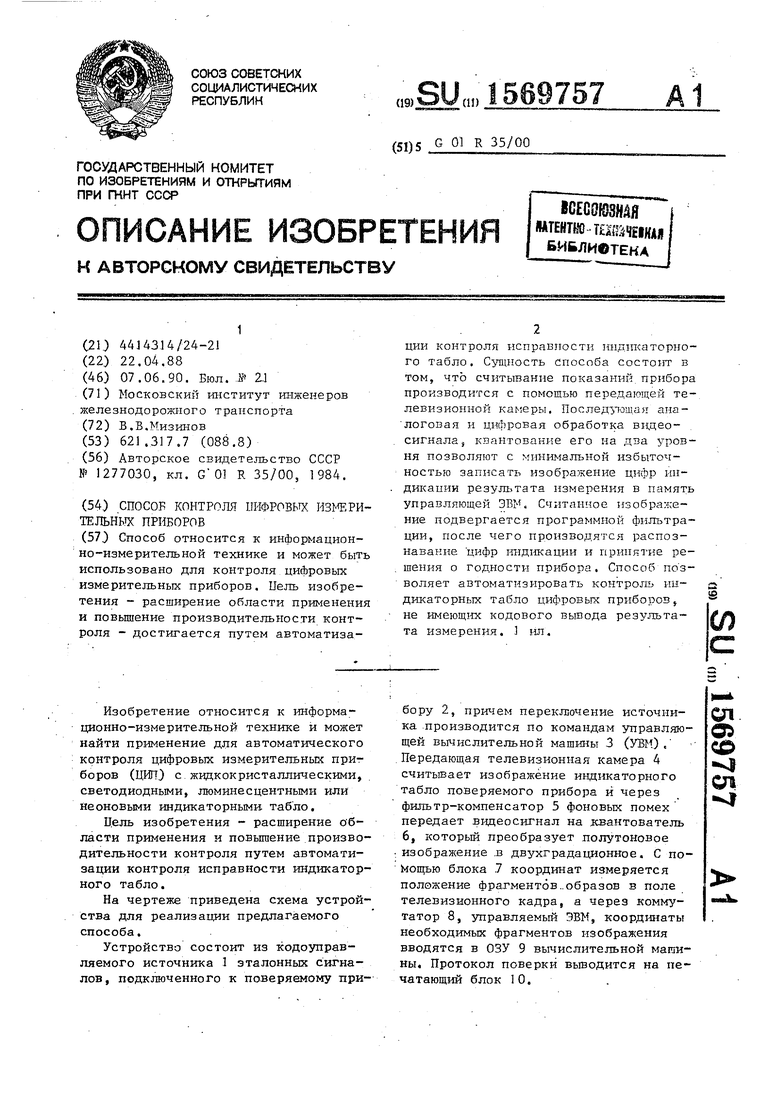


| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННАЯ КАМЕРА НА ПРИБОРАХ С ЗАРЯДОВОЙ СВЯЗЬЮ | 1991 |
|
RU2030839C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ НАБЛЮДЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ГОРЯЧЕГО ПРОКАТА | 2012 |
|
RU2502211C1 |
| Телевизионная система для наблюдения за перемещением горячего проката | 2020 |
|
RU2727527C1 |
| Устройство для отображения информации | 1978 |
|
SU748468A1 |
| ОХРАННАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА | 2012 |
|
RU2501090C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ НАБЛЮДЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ГОРЯЧЕГО ПРОКАТА | 2011 |
|
RU2472303C1 |
| Устройство для отображения информации на телевизионном индикаторе | 1987 |
|
SU1495845A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 1987 |
|
RU2013029C1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 1992 |
|
RU2067290C1 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ НАБЛЮДЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ГОРЯЧЕГО ПРОКАТА | 2011 |
|
RU2461142C1 |

Способ относится к информационно-измерительной технике и может быть использовано для контроля цифровых измерительных приборов. Цель изобретения - расширение области применения и повышение производительности контроля - достигается путем автоматизации контроля исправности индикаторного табло. Сущность способа состоит в том, что считывание показаний прибора производится с помощью передающей телевизионной камеры. Последующая аналоговая и цифровая обработка видеосигнала, квантование его на два уровня позволяют с минимальной избыточностью записать изображение цифр индикации результата измерения в память управляющей ЭВМ. Считанное изображение подвергается программной фильтрации, после чего производятся распознавание цифр индикации и принятие решения о годности прибора. Способ позволяет автоматизировать контроль индикаторных табло цифровых приборов, не имеющих кодового вывода результата измерения. 1 ил.
| Способ поверки цифровых измерительных устройств и устройство для его осуществления | 1985 |
|
SU1277030A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
