Изобретение относится к автоматике и измерительной технике и может использоваться в различных контрольно-измерительных устройствах в частности в системах обработки изображений, в устройствах в частности в системах обработки изображений, в устройствах позиционирования.
Известен способ определения координат центра формы плоских неподвижных объектов в декартовой системе координат методом уравновешивания площадей (журнал Зарубежная радиоэлектроника, 1983 г. , N 11, с. 93-97), заключающийся в том, что изображение объекта проэцируют на матрицу фотоприемников, последовательно опрашивают ячейки фотоприемной матрицы и находят абсциссу Хс = l центра формы из условия h
h -
- h
h h
h -
- h
h 0, l=
0, l=  (1) и координату Yc = k из условия
(1) и координату Yc = k из условия h(i)
h(i) -
- h(i)
h(i) h(i)
h(i) -
- h(i)
h(i) 0, к=
0, к=  (2) где ||h|| - норма матрицы, i - номер строки; j - номер столбца; n - размер матрицы; так, чтобы площади фигуры, лежащие по обе стороны от прямой Х = l и прямой Y = k были равны с заданной точностью.
(2) где ||h|| - норма матрицы, i - номер строки; j - номер столбца; n - размер матрицы; так, чтобы площади фигуры, лежащие по обе стороны от прямой Х = l и прямой Y = k были равны с заданной точностью.
Недостатком этого способа является , во-первых, то, что центр формы определяется неоднозначно, его координаты зависят от ориентации объекта относительно осей координат и не являются инвариантными относительно преобразований изображения; во-вторых, то, что для нахождения центра формы требуется большой объем вычислений и длительное время; в-третьих, то, что способ позволяет работать с изображениями, имеющими только две градации яркости, что ограничивает его функциональные возможности.
Известен способ определения координат центра тяжести изображения плоского объекта (Анисимов Б. А. , Курганов В. Д. , Злобин В. К. Распознавание и цифровая обработка изображений, М. : Высшая школа, 1983 г. , с. 81-89), заключающийся в том, что изображение объекта воспринимается фотоприемным устройством, затем вычисляют площадь фигуры через координаты точек ее контура, находят координаты центра тяжести фигуры путем деления статических моментов инерции на площадь.
Этот способ имеет следующие недостатки: для вычислений используются приближенные формулы, что снижает точность; требуется большой объем вычислений и длительное время для определения координат центра тяжести изображения, работать можно только с изображениями, имеющими две градации яркости, сложность аппаратурной реализации.
Известен способ нахождения центра изображения и центрирования изображения (В. П. Кожемяко. Оптоэлектронные-логиковременные информационно-вычислительные среды, Тбилиси, Мецниереба, 1984 г. , с. 236, рис. 6.31), заключающийся в том, что изображение проэцируют на фотоприемную матрицу, центр которой совпадает с началом декартовой системы координат ХОY, определяют разность яркостей в полуплоскостях ОY и О(-Y) и ОХ и О(-Х), на основании полученных значений определяют направление смещения, производят одновременное смещение всех точек изображения по оси ОХ и по оси ОY на [log2(2N1)] и [log2 (2N2)] , где [N] обозначает целую часть числа N, заключенного в скобки, и размеры матрицы по осям ОХ и ОY, затем определяют новое значение разностей суммарных яркостей в полуплоскостях и производят смещение изображения на вдвое меньшую величину, чем на предыдущем шаге и продолжают этот процесс до тех пор, пока суммарные яркостные составляющие относительно осей координат не станут равными с точностью до одного дискрета: при этом центр изображения совпадает с центром матрицы, а исходные координаты изображения можно определить по величинам и направлениям производящихся смещений.
Этот способ имеет следующие недостатки: необходимый центр изображения определяют неоднозначно, его положение зависит от ориентации изображения относительно осей координат и он не является инвариантным по отношению к ориентации и преобразованиям изображения (поворот изображения); вследствии инерционного характера центрирования изображения увеличивается время, необходимое для нахождения центра изображения, сложность аппаратурной реализации.
Наиболее близким по технической сущности к предлагаемому способу является способ определения координат центра тяжести изображения неподвижных объектов, заключающийся в том, что изображение объекта воспринимается фотоприемным устройством; 1) осуществляется последовательный опрос ячеек матрицы, 2) определяют массу объекта через площадь изображения как норму матрицы, в которой элементам, принадлежащим изображению, соответствует единица, а не принадлежащим - нуль, путем подсчета ячеек, принадлежащих изображению, 3) определяют статические моменты инерции относительно осей системы координат путем суммирования моментов инерции элементов изображения объекта относительно осей координат и определяют абсциссу Хс и ординату Yc центра тяжести путем деления соответствующих моментов инерции на норму матрицы по формулам
Xc=  H
H h
h (3)
(3)
Yc=  H
H h
h (4) где ||Нnn|| - норма матрицы, соответствующая фотоприемной Hnn матрице; i - номер строки; j - номер столбца.
(4) где ||Нnn|| - норма матрицы, соответствующая фотоприемной Hnn матрице; i - номер строки; j - номер столбца.
Этот способ имеет следующие недостатки: требуется большой объем вычислений и соответственно длительное время определения координат центра тяжести изображения объекта, способ позволяет работать с изображениями, имеющими две градации яркости; сложность реализации.
Целью изобретения является сокращение объема вычислений/ повышение быстродействия/ расширение функциональных возможностей способа за счет обеспечения возможности работы с полутоновыми изображениями/ упрощение аппаратурной реализации способа.
Указанная цель достигается тем/ что согласно способу/ заключающемуся в проэцировании объекта на фотоприемную матрицу/ с помощью которой преобразуют совокупность оптических сигналов/ полученных в результате пространственной дискретизации в совокупность электрических сигналов
Эo(m; n), /
где m = 1 ÷M/ а n = 1 ÷ N ; здесь M и N - число элементов разложения по ортогональным осям матрицы; с амплитудой/ пропорциональной интенсивности соответствующих оптических сигналов/ определении статических моментов инерции изображения относительно осей выбранной системы координат/ формируют на полученных электрических сигналов две группы новых совокупностей сигналов Э
Э (m; n), . . . , Э
(m; n), . . . , Э )
) и
и  Э
Э (m; n), . . . , Э
(m; n), . . . , Э )
) по правилу
по правилу
Э
 (5) здесь [А] - выделение целой части А
(5) здесь [А] - выделение целой части А
Э
 (6) одновременно формируют две группы интегральных сигналов
(6) одновременно формируют две группы интегральных сигналов S
S . . . , S
. . . , S и
и  S
S . . . , S
. . . , S и вспомогательный интегральный сигнал Sо, соответствующий интегральной интенсивности изображения объекта, путем интегрирования (накапливания, суммирования) всех сигналов Эxi(m; n), Эyj(m; n), Эo(m; n) соответствующих совокупностей по правилу
и вспомогательный интегральный сигнал Sо, соответствующий интегральной интенсивности изображения объекта, путем интегрирования (накапливания, суммирования) всех сигналов Эxi(m; n), Эyj(m; n), Эo(m; n) соответствующих совокупностей по правилу
S
 Э
Э
S
 Э
Э
S°=  Э°(m; n) (9) координату центра тяжести изображения определяют по формулам
Э°(m; n) (9) координату центра тяжести изображения определяют по формулам
Xцт=  (10)
(10)
Yцт=  (11) для чего известными методами суммируют с учетом весовых коэффициентов интегральные сигналы и производят деление на вспомогательный интегральный сигнал.
(11) для чего известными методами суммируют с учетом весовых коэффициентов интегральные сигналы и производят деление на вспомогательный интегральный сигнал.
Анализ научно-технической и патентной литературы показывает, что применение предложенного метода формирования частных интегральных сигналов и соответствующих им частных (отфильтрованных) изображений позволил отказаться от сложной процедуры умножения отсчетов изображения на соответствующие коды координат отсчетов с целью вычисления статических моментов инерции изображения, заменить операцию умножения операцией сложения и производить операцию накапливания, сложения сигналов одновременно со считыванием, вводом информации и производить обработку по двум каналам одновременно. Такой способ получения и определения моментов изображения был ранее не известен, применение его позволяет повысить быстродействие, сократить время определения координат до времени одного кадра, упростить аппаратурную реализацию и расширить функциональные возможности.
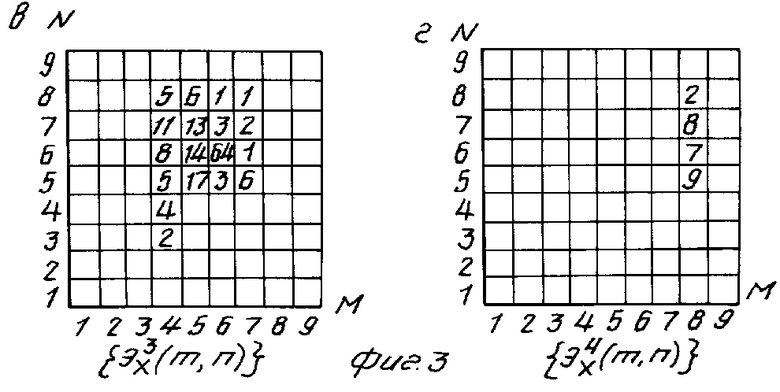
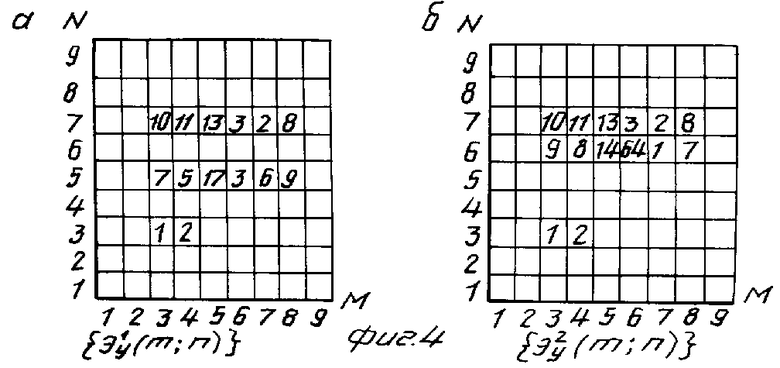
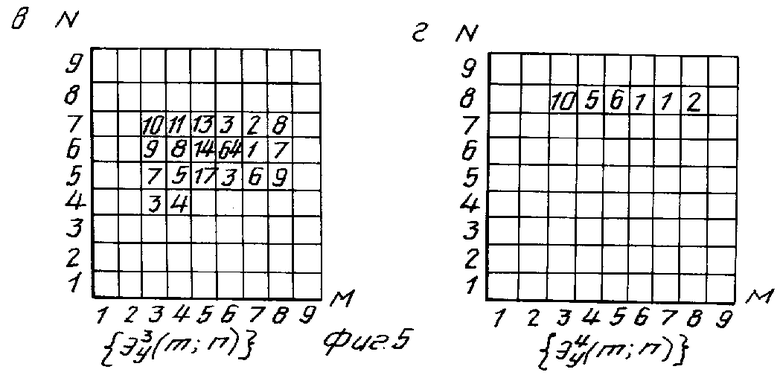
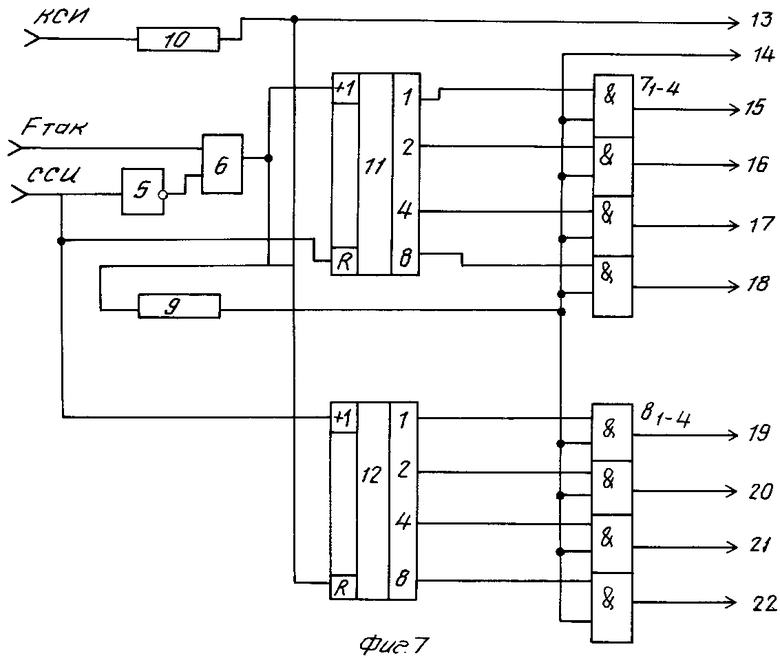
На фиг. 1, 2, 3, приведены исходная (1) и формируемые в процессе обработки две группы совокупностей сигналов. Соответственно первая группа (см. фиг. 2, 3) и вторая группа (см. фиг. 4, 5), которые поясняют сущность способа; на фиг. 6 приведена структурная схема устройства, реализующего предлагаемый способ; на фиг. 7 - функциональная схема устройства управления.
Предлагаемый способ определения координат центра тяжести изображения заключается в следующем.
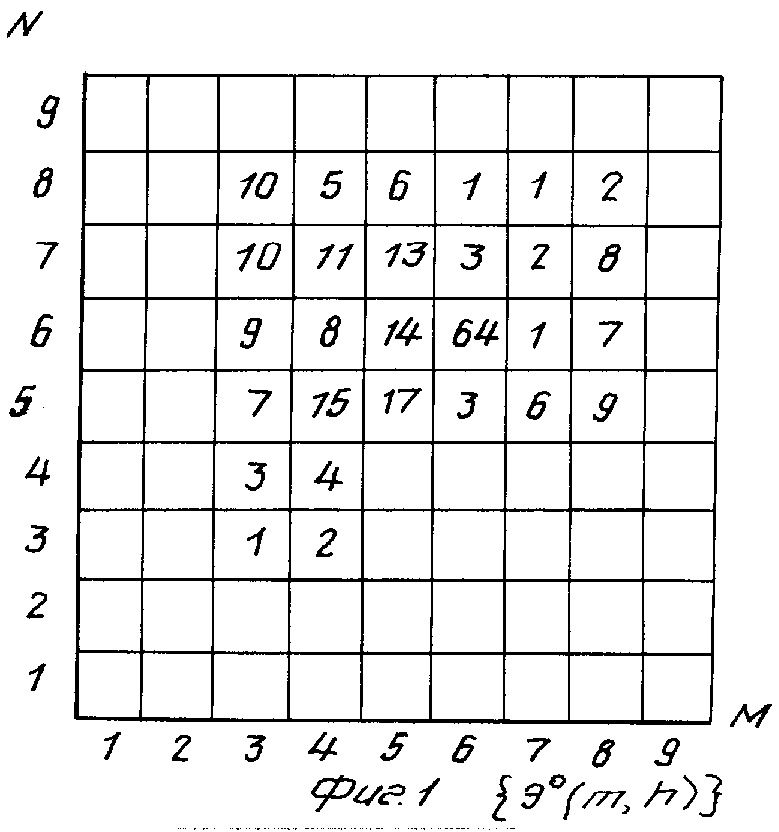
По известному способу координаты Хц.т и Yц.т центра тяжести изображения любого объекта вычисляются путем деления соответствующих моментов инерции по оси ОХ и ОY на площадь "массу" изображения. Для примера возьмем квадратную матрицу NxM = 9 элементам разложения. На фиг. 1 показано исходное изображение. (Здесь цифры внутри клеток соответствуют коду яркости светового пятна, т. е. амплитуде электрического сигнала Эо(m; n), отсутствие цифр соответствует нулевой амплитуде). Определим центр изображения по известному способу. Обозначим статические моменты инерции по оси ОХ через Мх и по оси ОY через Мy. Интегральная яркость изображения составит
Sо = 1 + 3 + 7 + 9 + 10 + 10 + 2 + 4 + 5 + 8 + 11+ + 5 + 17 + 14 + 13 + 6 + 3 + 64 + 3 + 1 + 6 + 1 + + 2 + 1 + 2 + 8 + 7 + 9 = 232
Мх = (1 + 3 + 7 + 9 + 10 + 10)х3 + (2 + 4 + 5 + 8+ + 11 +5)х4 + (17 + 14 + 13 + 6)х5 + (3 + 64 + 3+ + 1)х6 + (6 + 1 + 2 + 1)х7 + (9 + 7 + 8 + 9)х8 = = 1214
Мy = (1 + 2)х3 + (3 + 14)х4 + (7 + 5 + 17 + 3 + 6 + +9)х5 + (9 + 8 + 14 + 64 + 1 + 7)х6 + (10 + 11 + +13 + 3 + 2 + 8 )х7 + (10 + 5 + 6 + 1 + 1 + 2)х8= = 1419
Xцт=  =
=  = 5,23;
= 5,23;
Yцт=  =
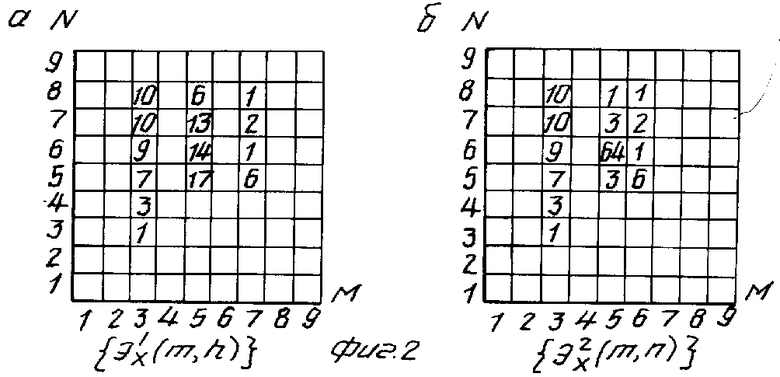
=  = 6,12 На фиг. 2, 3 показана, сформированная первая группа совокупностей соответственно Эх1(m; n); Эх2(m; n); Эх3(m; n); Эх4(m; n). На фиг. 4, 5 показана сформированная вторая группа совокупностей электрических сигналов соответственно Эy1(m; n); Эy2(m; n); Эy3(m; n); Эy4(m; n). Интегральные сигналы первой группы равны
= 6,12 На фиг. 2, 3 показана, сформированная первая группа совокупностей соответственно Эх1(m; n); Эх2(m; n); Эх3(m; n); Эх4(m; n). На фиг. 4, 5 показана сформированная вторая группа совокупностей электрических сигналов соответственно Эy1(m; n); Эy2(m; n); Эy3(m; n); Эy4(m; n). Интегральные сигналы первой группы равны
Sx1 = 1 + 3 + 7 + 9 + 10 + 10 + 17 + 14 + 13 + 6+ + 6 + 1 + 2 + 1 = 100
Sx2 = 1 + 3 + 7 + 9 + 10 + 10 +3+ 64 + 3 + 1 + +6 + 1 + 2 + 1 = 121
Sx3 = 2 + 4 + 5 + 8 + 11 + 5 + 17 + 14 + 13 + 6+ + 3 +64+3+ 1 + 6 + 1 + 2 + 1 = 166
Sx4 = 9 + 7 + 8 + 2 = 26 Интегральные сигналы для второй группы равны
Sy1 = 1 + 2 + 7 + 5 + 17 + 3 + 6 + 9 + 10 + +11 + 13 + 3 + 2 + 8 = 97
Sy2 = 1 + 2 + 9 + 8 + 14 + 64 + 1 + 7 + 10 + +11 + 13 + 3 + 2 + 8 = 153
Sy3 = 3 + 4 + 7 + 5 + 17 + 3 + 6 + 9 + 9 + 8+ + 14 + 64 + 1 + 7 + 10 + 11 + 13 + 3 + 2 + 8 = = 204
Sy4 = 10 + 5 + 6 + 1 + 1 + 2 = 25 Статические моменты по обеим осям будут соответственно равны
M =
=  =100×1+121×2+166×4+26×8=1214
=100×1+121×2+166×4+26×8=1214
M =
=  =97×1+153×2+204×4+25×8=1419 И, наконец, координаты центра тяжести изображения будут равны
=97×1+153×2+204×4+25×8=1419 И, наконец, координаты центра тяжести изображения будут равны
Xц.т =  = 5,23 Yц.т =
= 5,23 Yц.т =  = 6,12
= 6,12
Рассматриваемый способ предполагает выполнение необходимых операций следующим образом.
Изображение объекта проэцируется на телевизионную камеру на базе ПЗС матрицы. В камере происходит преобразование оптического сигнала в совокупности электрических сигналов и полученный видеосигнал поступает на параллельный быстродействующий аналого-цифровой преобразователь (АЦП). В первом канале посредством потактового суммирования в накапливающем сумматоре получают интегральную яркость изображения объекта Sо, соответствующую "массе" объекта, во втором - путем суммирования в накапливающих сумматорах получают интегральные сигналы первой группы совокупностей, которые складываются в конце кадра с учетом необходимого сдвига в комбнационных сумматорах, получая таким образом значение момента инерции Мх. В третьем канале путем суммирования в аналогичных накапливающих сумматорах получают интегральные сигналы второй группы совокупностей, которые складываются в конце кадра с учетом необходимого сдвига в комбинационных сумматорах, получая таким образом значение момента инерции Мy. Результат, т. е. координаты центра тяжести изображения получают на миниЭВМ путем деления по стандартной программе полученных моментов инерции на интегральную яркость изображения.
Устройство, реализующее способ, содержит телевизионную камеру на базе ПЗС матрицы (типа КТ-2-2) или на базе матрицы фотоприемников (типа МФ-14) 1, быстродействующий параллельный аналого-цифровой преобразователь (АЦП) (типа 1107ПВ1) 2, накапливающие сумматоры (см. например в кн. Применение интегральных микросхем в электронной вычислительной технике, с. 114 - справочник под ред. Б. Н. Файзулаева и Б. В. Тарабрина, М. : Радио и связь, 1986 г. ) (3,231-46, 241-4); устройство управления 4, комбинационные сумматоры (типа К155ИМ3) (251-3, 261-3) и микроЭВМ 27.
Видеовыход телекамеры 1 соединен с АЦП 2, выходы АЦП соединены с входами накапливающих сумматоров 3,231-4, 241-4, выходы накапливающего сумматора 3 соединены с входной шиной микроЭВМ 27. Выходы накапливающего сумматора 231, кроме выхода младшего разряда соединены с первыми входами комбинационного сумматора 251, причем выход с разрядом 2i соединен со входом с разрядом 2i+1, на вход старшего разряда сумматора 231 подается логический ноль; выходы накапливающего сумматора 232 соединены со вторыми входами комбинационного сумматора 251, выходы комбинационного сумматора 251, кроме выхода младшего разряда соединены с первыми входами комбинационного сумматора 252, причем выход с разрядом 2i соединен с входом с разрядом 2i+1, а выход переноса комбинационного сумматора 251соединен с входом старшего разряда комбинационного сумматора 252; выходы накапливающего сумматора 233 соединены со вторыми входами комбинационного сумматора 252, выходы комбинационного сумматора 252, кроме выхода младшего разряда соединены с первыми входами комбинационного сумматора 253, причем выход с разрядом 2i соединен с входом с разрядом 2i+1, а выход переноса комбинационного сумматора 252соединен с входом старшего разряда комбинационного сумматора 253, выходы накапливающего сумматора 234 соединены со вторыми входами комбинационного сумматора 253; выход нулевого (младшего) разряда накапливающего сумматора 231 соединен с входом нулевого разряда входной шины канала Х микроЭВМ 27, выход младшего разряда комбинационного сумматора 251 соединен с входом первого разряда входной шины, выход младшего разряда комбинационного сумматора 252 соединен с входом второго разряда входной шины микроЭВМ 27, выходы комбинационного сумматора 253соединены с входами входной шины микроЭВМ 27 таким образом, что выход с разрядом 2i соединен с входом с разрядом 2i+3, а выход переноса соединен с старшим разрядом входной шины канала Х микроЭВМ 27. Выходы накапливающих сумматоров 241-4 соединены с комбинационными сумматорами 261-3 и с входами входной шины канала Y микроЭВМ 27 аналогично. Служебные (управляющие) выходы телевизионной камеры 1 соединены с входами устройства управления 4. Устройство управления содержит инвертор 5, девять схем совпадения 6, 71-4, 81-4, две схемы выделения заднего фронта (СВЗФ) 9, 10, и два двоичных счетчика 11 и 12.
Выход, с которого снимается строчный синхроимпульс (ССИ) телевизионной камеры 1 соединен с входом инвертора 5, суммирующим входом счетчика 12 и входом установки в ноль счетчика 11, выход инвертора 5 соединен с первым входом схемы совпадения 6, второй вход которой соединен с выходом телевизионной камеры, с которого снимается сигнал тактовой частоты Fтак, этот же выход телевизионной камеры 1 соединен с тактовым входом АЦП 2, выход схемы совпадения 6 соединен с суммирующим входом счетчика 11 и СВЗФ 9, выход СВЗФ 9 соединен с первыми входами схем совпадения 71-4 и 81-4 и входом записи накапливающего сумматора 3, выход 14, вторые входы этих схем совпадения соединены с выходами счетчиков 11 и 12 соответственно выходы счетчика 11 - с входами схем совпадения 71-4, а выходы счетчика 12 - с входами схем совпадения 81-4, выход телевизионной камеры 1, с которого снимается кадровый синхроимпульс (КСИ), соединен с входом СВЗФ 10 и входом "ЗАПИСЬ" микроЭВМ 27, выход СВЗФ 10 соединен с входам установки в ноль счетчика 12 и входами "Установка в ноль" накапливающих сумматоров 231-4 и 241-4, выходы схем совпадения 71-4 и 81-4 - 14-22 соединены с входами "ЗАПИСЬ" накапливающих сумматоров 231-4 и 241-4 соответственно.
Устройство работает следующим образом: задним фронтом КСИ происходит сброс накапливающих сумматоров и счетчика управления 12, счетчик управления 11 сбрасывается передним фронтом ССИ. С началом кадра видеосигнал с телевизионной камеры 1 поступает на АЦП 2, где потактово оцифровывается и поступает на входы всех накапливающих сумматоров 3,231-4, 241-4. В накапливающем сумматоре 3 происходит потактовое суммирование всех значений оцифрованного видеосигнала и к концу кадра в нем будет храниться число, соответствующее значению вспомогательного интегрального сигнала Sо, т. е. интегральной интенсивности объекта. В накапливающих сумматорах 231-4 канала Х происходит суммирование значений оцифрованного видеосигнала и формирование интегральных сумм. Прохождение тактовых сигналов на входы записи накапливающих сумматоров 231-4регламентируется состоянием выходов счетчика управления 11, состояние которых изменяется с тактовой частотой. К концу кадра в накапливающих сумматора 231-4 хранятся интегральные совокупности Sxi, а на входной шине канала Х микроЭВМ 27 к концу кадра в результате сложения в комбинационных сумматорах 251-3 получают сумму, соответствующую статическому моменту инерции по оси ОХ - Мх. Статический момент Мyвычисляется в канале Y аналогично, только прохождение тактовых сигналов на входы записи накапливающих сумматоров 241-4 регламентируется состоянием выходов счетчика управления 12, состояние которых изменяется с частотой строк. По переднему фронту КСИ происходит считывание значений МхМy и Sо в микроЭВМ 27. В микроЭВМ выполняется операция деления, т. е. вычисление координат центра тяжести изображения, которая занимает время обратного хода кадровой развертки. С началом кадра цикл повторяется. Разрядность комбинационных сумматоров и количество накапливающих сумматоров выбирается в зависимости от предполагаемого размера объекта и количества светочувствительных ячеек фотоприемной матрицы.
Докажем, что поставленная цель достигнута. Во-первых, что касается сокращения объема вычислений, то по сравнению с прототипом, в котором требуется производить умножение сигналов отсчетов элементов изображения на координаты, а таких элементов всего N х М, в предложенном способе операция умножения отсутствует. Это приводит к тому, что не требуется задержка тактовых сигналов, синхронизирующих работу фотоприемной матрицы на время умножения, и формирование интегральных сигналов, на основе которых вычисляются статические моменты, происходит в темпе считывания видеосигнала. Кроме того, возможен вариант реализации способа, когда формирование всех частных изображений (групповых совокупностей сигналов) может происходит параллельно при оптических методах формирования. В этом случае применяются фильтры (транспаранты) и интегрирующие по пространству элементы, (линзы, фоконы и т. д. ).
Во-вторых, что касается повышения быстродействия, то время формирования всех интегральных сигналов (осуществляемое с высокой точностью, поскольку применяется предварительная оцифровка видеосигнала) идет одновременно для двух каналов и заканчивается к концу кадра, что позволяет за время обратного хода кадровой развертки (порядка 1 мсек) определить координаты центра тяжести изображения.
В-третьих, что касается упрощения аппаратурной реализации, то способ предполагает наличие только формирователей интегральных сигналов (интеграторы для аналоговых сигналов и накапливающие сумматоры для цифровых), включая простые коммутаторы сигналов для выделения по требуемым условиям нужных элементов и матрицу фоточувствительных элементов (например телекамера на ПЗС матрице). При этом не требуется сложных вычислительных устройств для умножения и управления алгоритмом обработки как в прототипе. Вычислительный блок требуется лишь на конечном этапе вычислений и может быть выполнен в виде табличного делителя ПЗУ.
В-четвертых, что касается расширения функциональных возможностей, то предлагаемый способ позволяет определить координаты центра тяжести не только бинарных, но и полутоновых изображений, с большой точностью производить обработку изображений (до долей элемента ПЗС матрицы) и учитывать фон, посредством пороговой обработки видеосигнала на АЦП. (56) Жаботинский Ю. Д. Адаптивные промышленные роботы и их применение в микроэлектронике, М. , Радио и связь, 1985 г. , с. 31.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат центра тяжести изображения | 1988 |
|
SU1543430A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2550523C2 |
| Устройство для определения координат центра изображения | 1986 |
|
SU1427395A1 |
| СПОСОБ РАСПОЗНАВАНИЯ СИММЕТРИЧНОСТИ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2037204C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ОБЪЕКТА НА ИЗОБРАЖЕНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2024939C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМНОЖЕНИЯ ЧИСЛОВЫХ МАТРИЦ | 1991 |
|
RU2022334C1 |
| Устройство определения координат центра тяжести изображения | 1987 |
|
SU1513485A1 |
| УСТРОЙСТВО ДЛЯ УМНОЖЕНИЯ МАТРИЦ КАРТИН-ИЗОБРАЖЕНИЙ | 1991 |
|
RU2018916C1 |
| Способ определения декартовых координат геометрического центра светового пятна | 1986 |
|
SU1412003A1 |
| Устройство для умножения квадратных матриц картин-изображений | 1989 |
|
SU1781679A1 |
Использование: в телевидении, автоматике и измерительной технике, в системах определения координат центра тяжести изображений. Сущность изобретения: проецируется оптический сигнал объекта на фотоприемную матрицу, дискретизируют оптический сигнал, преобразуют оптический сигнал в электрический сигнал Э (m : n), где m 1 - M, а n 1 - N число элементов разложения по ортогональным осям матрицы, определяют координаты центра тяжести изображения относительно оси выбранной системы координат, при этом формируют из полученных электрических сигналов две группы дискретизированных электрических сигналов и две группы интегральных сигналов. Устройство, реализующее способ, содержит телекамеру 1, аналого-цифровой преобразователь 2, накапливающий сумматор 3, блок управления 4, который содержит инвертор 5, первый, второй, третий блоки совпадения 6,7,8, две схемы выделения заднего фронта 9,10, два счетчика 11,12 и десять выходов 13 - 22, восемь накапливающих сумматоров 23, 23, 23, 23, 24, 24, 24, 24, шесть комбинационных сумматоров 25, 25, 25, 26, 26, 26, вычислитель 27. Цель изобретения - повышение точности определения координат центра тяжести изображения. 7 ил.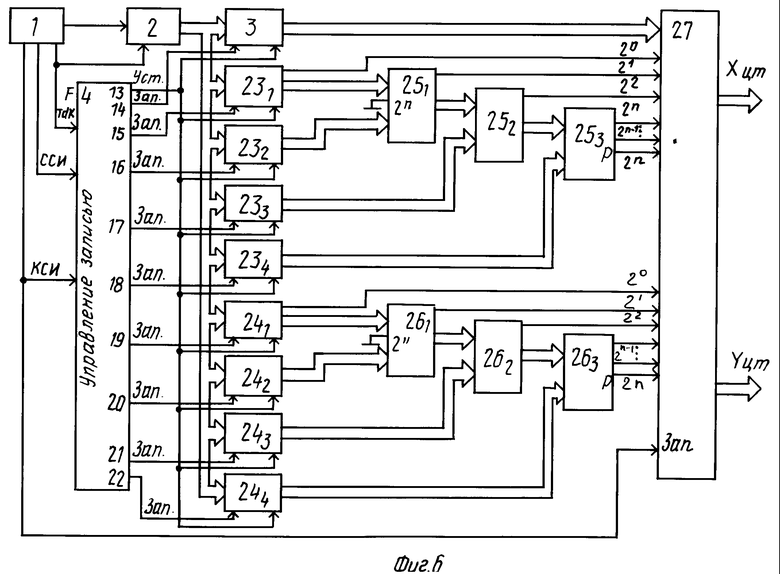
СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ТЯЖЕСТИ ИЗОБРАЖЕНИЯ, при котором проецируют оптический сигнал объекта на фотоприемную матрицу, дискретизируют оптический сигнал, преобразуют оптический сигнал в дискретизированный электрический сигнал Эo(m, n), где m = 1 ÷ M, а n = 1 ÷ N - число элементов разложения по ортогональным осям матрицы, с амплитудой, пропорциональной интенсивности соответствующих оптических сигналов, определяют координаты центра тяжести изображения относительно оси выбранной системы координат, отличающийся тем, что, с целью повышения точности определения координат центра тяжести, после преобразования аналогового сигнала в дискретизированный электрический сигнал формируют из полученных электрических сигналов две группы дискретизированных электрических сигналов
Э (m; n), . . . , Э
(m; n), . . . , Э ),
),
Э (m; n), . . . , Э
(m; n), . . . , Э )
)
из исходной совокупности по правилу


 ,
,
Э
 ,
,
где Эo(m, n), Эxi(m, n), Эyi(m, n) - электрические сигналы соответственно исходной первой и второй совокупностей,
одновременно с формированием двух групп дискретизируемых электрических сигналов формируют две группы интегральных сигналов
S . . . , S
. . . , S и S
и S . . . , S
. . . , S
и вспомогательный интегральный сигнал S0, соответствующий интегральной интенсивности изображения объекта, путем суммирования всех сигналов соответствующих совокупностей по формуле
S
 Э
Э
 Э
Э Э°(m; n),
Э°(m; n),
где S
а сигнал координаты центра тяжести изображения определяют по формулам
Xцт=  ;
;
Yцт=  .
.
