частоте сети а длительность - Т/2, где Т - период колебаний напряжения сети, Ыа,В:4ходе датчика фазы 15.сигнзл пропорционален углу сдвига фазы. С выхода блока функционального прч зо6разования фазы 16 сигнал, пропорциональный sin. поступает
на первый вход умножителя 17, на второй вход которого подается напряжение с выхода амплитудного детектора 19. Амплитуд-, ный детектор 20 на выходе формирует сигнал, пропорциональный амплитуде выходного тока компенсатора. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации реактивной мощности в цепях с синусоидальными токами и переменной нагрузкой | 1988 |
|
SU1557628A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФАЗОВЫХ СДВИГОВ СИГНАЛОВ С ИЗВЕСТНЫМ ОТНОШЕНИЕМ ИХ АМПЛИТУД | 1993 |
|
RU2037833C1 |
| Устройство для управления статическим тиристорным компенсатором | 1985 |
|
SU1309175A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2017 |
|
RU2668346C1 |
| АНАЛИЗАТОР РАБОТЫ СИСТЕМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2532990C2 |
| УСТРОЙСТВО АНАЛОГОВОГО ДАТЧИКА РЕАКТИВНОЙ СОСТАВЛЯЮЩЕЙ ПЕРЕМЕННОГО ТОКА | 2017 |
|
RU2673335C2 |
| АНАЛИЗАТОР РАБОТЫ СИСТЕМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2626282C2 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В НАПРЯЖЕНИЕ | 1987 |
|
RU2056700C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗОВОГО СДВИГА ДВУХ СИНУСОИДАЛЬНЫХ СИГНАЛОВ | 1992 |
|
RU2020494C1 |
| Способ компенсации искажений токов в многофазных цепях с нелинейными нагрузками | 1988 |
|
SU1571722A1 |
Изобретение относится к электроэнергетике, в частности компенсации мощности в синусоидальных цепях с переменной нагрузкой за счет компенсации сдвига угла фаз между током и напряжением в общепромышленных и автономных синусоидальных электрических сетях с помощью статических вентильных устройств. Цель изобретения - расширение функциональных возможностей и повышении точности регулирования при колебаниях частоты и амплитуды напряжения сети. С помощью датчиков напряжения 5 и тока 2,3 осуществляется гальваническая развязка, согласование уровня сигналов энергетических цепей и измерительной части устройства на выходе блоков сравнения 13 и 14 имеем последовательности импульсов, частота следования которых равна частоте сети, а длительность - T/2, где T - период колебаний напряжения сети. На выходе датчика фазы 15 сигнал пропорционален углу сдвига фазы. С выхода блока функционального преобразования фазы 16 сигнал, пропорциональный SINφ, поступает на первый вход умножителя 17, на второй вход которого подается напряжение с выхода амплитудного детектора 19. Амплитудный детектор 20 на выходе формирует сигнал, пропорциональный амплитуде выходного тока компенсатора. 4 ил.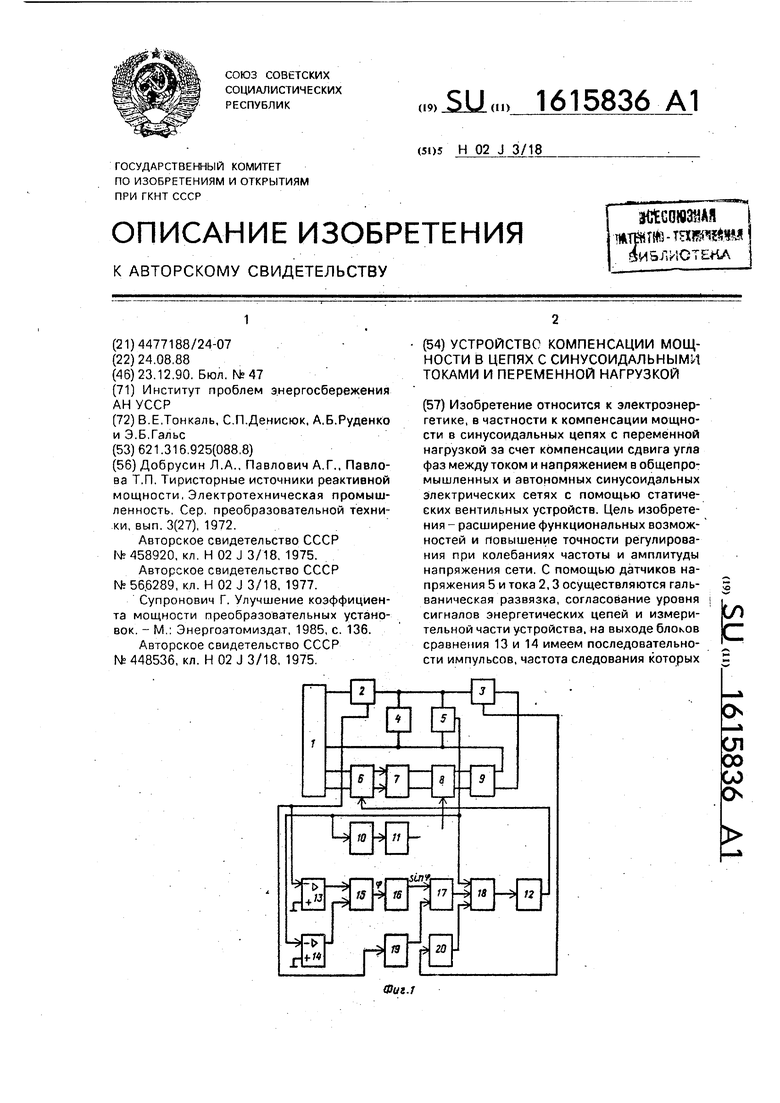
Изобретение относится к электроэнеретике, в частности к компенсации мощноти в синусоидальных цепях с переменной
агрузкой за счет компенсации сдвига угла аз между током и напряжением в общеромышленных и автономных синусоидальных электрических сетях с помощью статиеских вентильных устройств.
Цель изобретения - расширение функционал возможностей и повышение очности регулирования при колебаниях частоты и амплитуды напряжения сети.
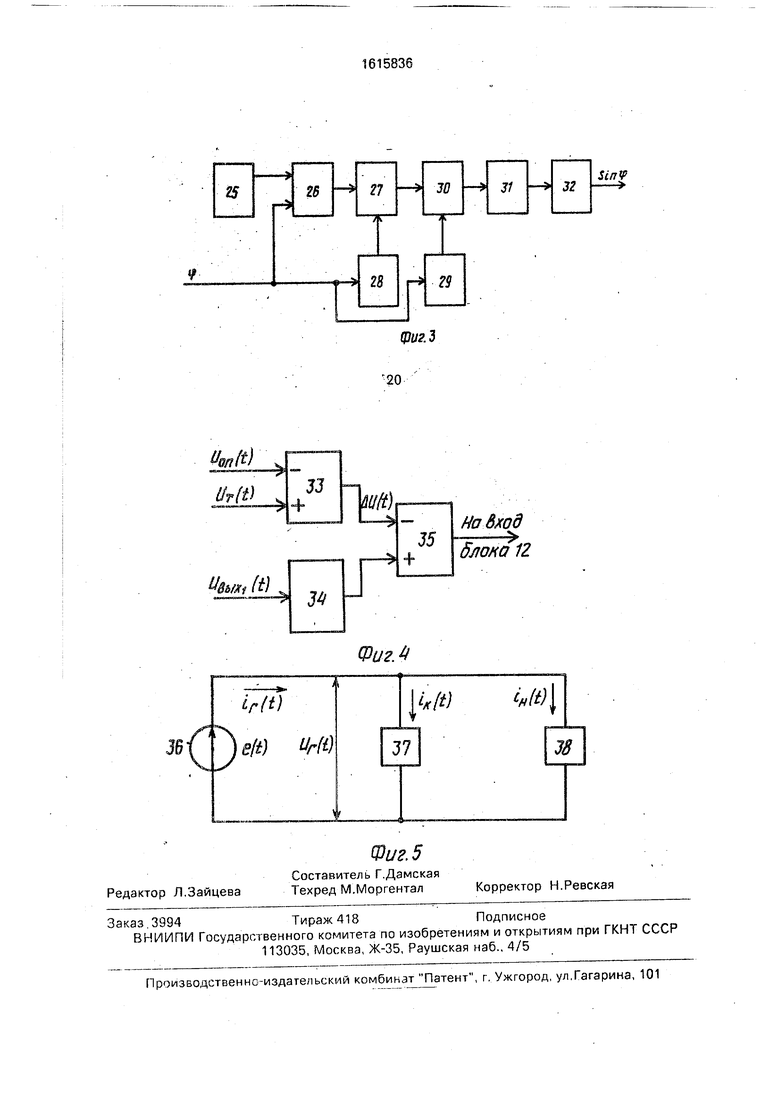
На фиг. 1 приведена структурйая схема устройства компенсации мощности в синусоидальных цепях; на фиг.2 - структурная схема блока выработки импульсов управления инвертором; на фиг.З - структурная схема блока функционального преобразования фазы; на фиг.4 - структурная схема управ ления по отклонению; на фиг.5 - эквивалентная схема системы генератор - компенсатор - нагрузка.
Устройство.компенсации мощности содержит источник 1 питания, датчики 2 и 3 тока, нагрузку 4, датчик 5 напряжения, выпрямитель 6, фильтр 7, инвертор 8 тока, разделительный трансформатор 9, блок 10 выработки импульсов управления инвертором, формирователи 11 и 12 импульсов, блоки 13 и 14 сравнения, датчик 15 фазы, блок 16 функционального преобразования фазы, умножитель 17, схему 18 управления по отклонению, амплитудные детекторы 19 и 20. Блок оыработки импульсов содержит интегратор 21, блохи 22 и 23 сравнения, блок24 формирования импульсов.Блокфун- кционального преобразования фазы 16 содержит генератор 25 тактовых импульсов,
блок 26 формирования импульсной последовательности, счетчик 27, формирователи 28 м 29 коротких импульсов, регистр 30 постоянное запоминающее устройство 31, циф- роаналоговый 32 преобразователь. Схема 18 управления по от -лонению содержит сумматор 33, генератор 34 двухполярного пилообразного напряжения, компаратор 35. Эквивалентная схема содержит двухполюсные злзменты, моделирующие генератор 36,
-
. ,
устройство 37 компенсации мощности, нагрузку 38.
В устройстве компенсации мощности в синусоидальных цепях, включенном парал5 лельно с вторым выходом источника 1 питания, выпрямитель б своим входом соединен с вторым выходом источника 1 питания, а выходом - с входом фильтра 7, выходные . зажимы которого подключены к входу ин10 верторавтока, подсоединенного первичной обмоткой к входу разделительного трансформатора 9, а вторичной - параллельно нагрузке 4, датчик 5 напряжения включен параллельно с первым выходом источника 1
15 питания и нагрузкой 4, первый датчик 2 тока подключен последовательно с первым выходом источника 1 питания и нагрузкой 4,втО: рой датчик 3 тока подсоединен последовательно с вторичной обмоткой разделитель- 20 ного трансформатора 9, вход блока ТО выработки импульсов управления инвертором соединен с выходом датчика 5 напряжения, а его выход - с входными зажимами формирователя 11 импульсов, выход которого под25 ключен к управляющим входам инвертора 8 тока, вход первого амплитудного детектора 19 и вход первого блока 13 сравнения подключены к выходным зажимам первого датчика 2 тока, выход амплитудного детек30 тора 19 подсоединен к первому входу умнб- жителя 17, второй вход которого подключен к выходу блока 16 функционального преобразования фазы, входные клеммы которого подсоединены к выходным клеммам датчи35 ка 15 фазы, подключенного входными зажимами к выходам блоков 13 и 14 сравнения, вход блока 14 сравнения связан с выходом датчика 5 напряжения, вход амплитудного детектора 20 подключен к выходу датчика 3
40 тока, его выход - к входу схемы 18 управления по отклонению,, два других входа которой подключены соответственно к жителю 17 и датчику 5 напряжения, выход схемы 18 управления по отклонению под45 ключен к входу формирователя 12 импульсов, связанного выходом с управляющими входами выпрямителя 6.
Энергия, потребляемая от генератора синусоидального напряжения, должна полностью преобразовываться в другие виды в нагрузке, т.е. форма тока, потребляемого от генератора, должна быть синусоидальной и совпадающей по фазе с напряжением генератора.
Для описания процесса компенсации мощности в синусоидальных цепях рассмотрим зквивалентную схему (фиг.5), содержащую зквивалентные модели генератора 36 синусоидального напряжения er{t), устройства 37 компенсации мощности, нагрузки 38.
Пусть er{t) ЕМ sin wt,
lH(t)lMHSln(Ut + 0,(1)
где Ем Var- амплитуда напряжения генератора, которая может колебаться относительно своего настоящего значения; ,
ft) Var - изменяющаяся в общем случае частота напряжения сети;
1мн - амплитуда тока в нагрузке;
(р Var - угол сдвига фазы тока в нагрузке относительно напряжения генератора, который может изменяться и быть как положительным (емкостной характер нагрузки), так и отрицательным (индуктивная нагрузка).
тогда совпадающий по фазе с напряжением ток генератора должен иметь вид
lr{t)lMrSlnwt,-(2)
где 1мг - амплитуда тока генератора.
Записывают значения мгновенной мощности в сечениях 1-1 и-2-2
iXt)
Pi-i(t)-eKt) P2-2(t) ег(т) iH(t)-- - cos(2 м t + ({)}}
Ем 1мг sin r/n, (3)
EM IMH I
cosy -
(4)
Находят значения активной мощности в зтих сечениях по выражениям (3) и (4)
. тг- I
(5) cos.
(6)
Компенсация мощности в синусоидальной цепи (фиг.5) будет эффективной только 35 в случае, когда компенсатор не будет потреблять активной мощности, т.е.
1
1
(t)
оI
-P2-2(t)
с учетом условий (5) и (6) условие (7) примет вид
или
Рк -уПмг-1мнС05у 0 1мг 1мн cosy).
50
55
10
15
20
25
30
35
ЛП
45
Зная условие (8), определяют необходимый вид тока компенсатора 1к(1) (фиг.5), при котором ток генератора будет иметь вид (2) ik (t) Ir (t) - 1м (t) 1мг sin ft) t - IMH sin (ft) t +
+ ) IMH COS Slnft)t-IMH sin ft)t - IMH COS ft) t Sfn I MM sin sin (ft) t + .
(9)
Алгоритм, в соответствии с которым осуществляется компенсация мощности, заключается в следующем: измерение величин Ur(t) и 1н(1); определение величины (р; расчет тока компенсатора 1к(г) в соответствии с выражением (8); формирование тока iic(t)on с помощью модуляции сигнала датчика тока инвертора тока силовой части компенсатора. Для отслеживания текущего значения тока компенсатор 1к(1)т по отношению к опорному (зталонному) значению тока применена замкнутая система регулирования.
Точность регулирования величины, генерируемой генераторами энергии, достигается за счет использования в качестве параметров регулирования не интегральных характеристик, а мгновенных величин, что позволяет более оперативно менять опорный сигнал, уменьшить время обработки различных типов возмущений и снизить погрешность определения текущих значений сигнала регулирования по сравнению с опорными (эталонными) сигналами.
Повышение экономичности генерирования энергии генераторами в синусоидальных цепях получено за счет устранения перетоков энергии по линиям связи, что в известных системах приводит к увеличению потерь электроэнергии и ухудшен и кз режимов работы генераторов, и к возрастанию затрат первичных энергоресурсов.
Компенсация мощности в синусоидальных цепях с переменной нагрузкой с помощью предлагаемого устройства производится следующим образом.
С помощью датчиков напряжения 5 и тока 2 и 3 осуществляются гальваническая развязка, согласование уровней сигналов энергетических цепей и измерительной части устройства, а также измерение мгновенных значений напряжения генератора Ur{t), соответствующего напряжения на первом выходе источника 1 питания, значения тока нагрузки 1н(г) и текущего значения тока компенсатора 1к(т)г. Выходное значение датчика 5 напряжения UBbixi(t), пропорциональное измеряемому напряжению Ur(t) х X (UBbixi(t) с Ur(t)), поступает на входы блока 14 сравнения, блока 10 выработки импульсов управления инвертором и схемы 18 управления по отклонению. Выходное напряжение первого датчика 2 тока UeuxsW, пропорциональное току нагрузки ивыхз (t) «он 1н (t). поступает на входы блока 13срав- нения и амплитудного детектора 19.
На выходе блоков 13 и 14 сравнения имеют последовательности импульсов, частота следования которых равна частоте сети, а длительность импульсов -Т/2, где Т - период колебаний напряжения сети Ui{t), причем импульсные последовательности будут сдвинуты друг относительно друга на угол сдвига фазы у тока в нагрузке относительно напряжения генератора. С выходов блоков 13 и 14 сравнения сигналы поступают ни входы датчика 15 фазы, на выходе которого будет сигнал, пропорциональный углу сдвига фазы р. С выхода датчика 15 фазы сигнал поступает на вход блока 16 функционального преобразования фазы.
Рассмотрим работу блока, 16 функционального преобразования фазы (на фиг.З). На входы блока 26 формирования импульсной последовательности поступают сигналы с выходов датчика 15 фазы и генератора 25 тактовых импульсов, причем частота следования тактовых импульсов во много раз превышает частоту напряжения питания. На выходе формирователгя 26 импульсной последовательности формируются пачки импульсов, причем длительность каждой пачки пропорциональна сдвигу фаз р, а частота импульсов в пачке равна частоте генератора 25 тактовых импульсов. В счетчике 27, на вход которого поступает сигнал с выхода формирователя 26 импульсной последовательности, производится подсчет импульсов в каждой пачке, затем это значение запоминается в регистре 30, на вход которого поступает сигнал со счетчика 27, записью информации в регистр 30 управляют соответственно формирователи 28 и 29 коротких импульсов, на входы которых поступает сигнал с выхода датчика 15 фазы. В постоянном запоминающем устройстве 31 сигнал с регистра 30, пропорциональный сдвигу фаз |р, преобразуется в сигнал, пропорциональный sin. Далее с выхода постоянного запоминающего устройства 31 сигнал поступает в цифроаналоговый преобразователь 32, преобразующий цифровой сигнал в аналоговый.
С выхода блока 16 функционального преобразования фазы (фиг.1) сигнал, пропорциональный sin р, поступает на первый вход умножителя 17, на второй вход которого подается напряжение с выхода амплитудного детектора 19. На выходе умножителя 17 формируется напряжение, пропорциональное произведению 1мн81п /7 и поступает на первый вход схемы 18 управления по отклонению, На второй и третий входы схемы 18 управления по отклонению поступают сигналы соответственно с датчика 5 напряжения и амплитудного детектора 20. Амплитудный детектор 20, на вход которого поступает напряжение с датчика тока 3 UBbix3(tXUBwx3(t) «2 1к(х)), на выходе формирует сигнал , пропорциональный ампли0 туде выходного тока 1км компенсатора.
Рассмотрим работу схемы 18 управления по отклонению, (фиг.4). На вход сумматора 33 поступают сигналы с выходов . умножителя 17 и амплитудного детекто5 ра 20. На выходе умножителя формируется сигнал Uon(t), пропорциональный 1мн sin (р на выходе амплитудного детектора сигнал UrCt), пропорциональный 1км. Сумматор 33 производит вычитание одного из зтих на0 пряжений из другого, выделяя, таким образом, сигнал ошибки который поступает затем на инвертирующий вход компаратора 35. На инвертирующий вход компаратора 35 поступает сигнал с выхода генерато5 ра 34 двухполярного пилообразного напряжения, жестко засинхронизированного с сетью вследствие того, что на вход генератора 34 поступают сигналы с выхода датчика 5 напряжения. Таким образом, с компа0 ратора 35 снимаются импульсы, полученные посредством ШИМ второго рода, длительность которых поддерживается такой, чтобы значение А U{t) стремилось к О, а следовательно,
51км 1нм sin у).
С выхода схемы 18 управления по отклонению сигнал поступает на вход формирователей 12 импульсов, с выхода которого импульсы поступают на управляющие вхо0 ды выпрямителя 6. Таким образом, посредством изменения угла управления выпрямителем амплитуда тока км на выходе компенсатора поддерживается равной IHMSJH I CI. Согласно уравнению (9) ток на выходе ком5,neHcaTopaiK(t)MHSin((wt +л/2). Таким образом, выходной ток компенсатора должен быть сдвинут относительно напряжения питания Ur{t) на я/2. Это условие реализуется с помощью блока 10 выработки
0. импульсов управления инвертором.
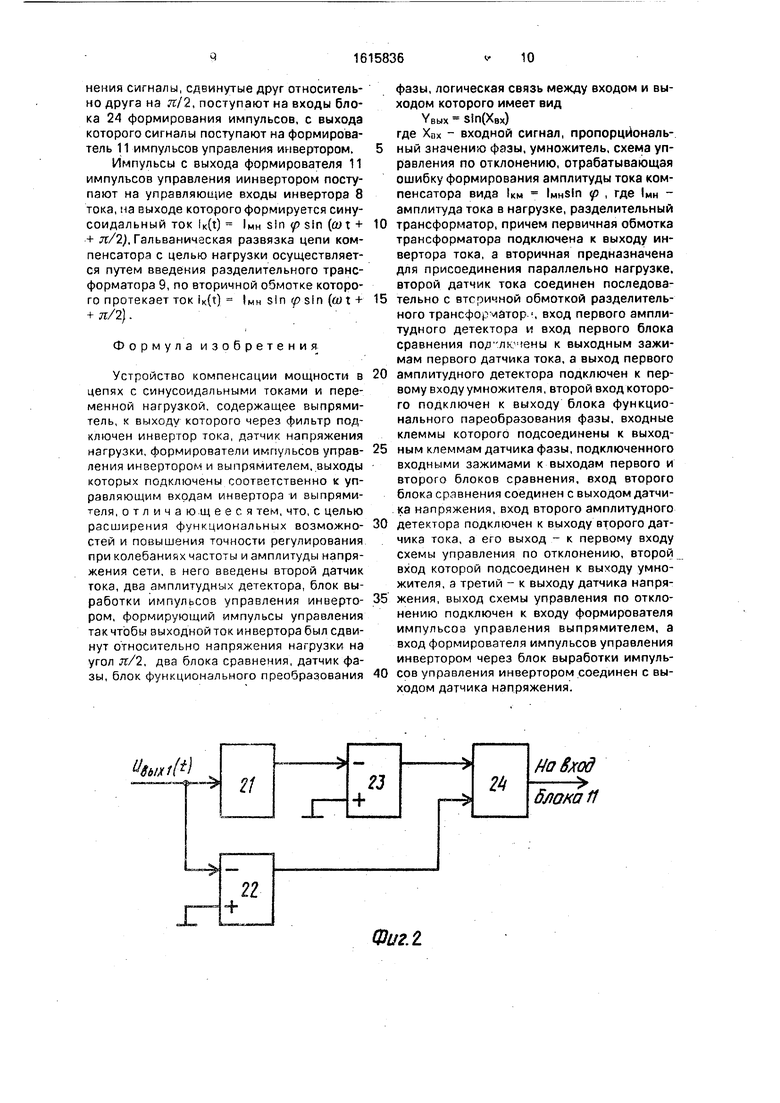
Рассмотрим работу блока 10 выработки импульсов управления инвертором (фиг.2). С выхода датчика 5 напряжения сигнал по- 55 ступает на входы интегратора 21 и блока 22 сравнения. С выхода интегратора 21 снима-- ется сигнал, сдвинутый относительно входного на л:/2, и поступает на вход блока 23 сравнения, С выходов блоков 22 и 23 сравнения сигналы, сдвинутые друг относительно друга на л:/2, поступают на входы блока 24 формирования импульсов, с выхода которого сигналы поступают на формирователь 11 импульсов управления инвертором.
Импульсы с выхода формирователя 11 импульсов управления иинвертором поступают на управляющие входы инвертора 8 тока, на выходе которого формируется синусоидальный ток 1к(1) 1мн sin р sin ( + + jr/2. Гальваническая развязка цепи компенсатора с целью нагрузки осуществляется путем введения разделительного трансформатора 9, по вторичной обмотке которого протекает ток UCt) 1мн sin ip sin (u)t + + Я/2).
Формула изобретения
Устройство компенсации мощности в цепях с синусоидальными токами и переменной нагрузкой, содержащее выпрямитель, к выходу которого через фильтр подключен инвертор тока, датчик напряжения нагрузки, формирователи импульсов управления инвертором и выпрямителем, выходы которых подключены соответственно к управляющим входам инвертора -и выпрямителя, отличающееся тем, что, с целью расширения функциональных возможностей и повышения точности регулирования при колебаниях частоты и амплитуды напряжения сети, в него введены второй датчик тока, два амплитудных детектора, блок выработки импульсов управления инвертором, формирующий импульсы управления так чтобы выходной ток инвертора был сдвинут относительно напряжения нагрузки на угол jr/2, два блока сравнения, датчик фазы, блок функционального преобразования
21
фазы, логическая связь между входом и выходом которого имеет вид
Увых Sin(Xex)
где Хах - входной сигнал, пропорцйональный значению фазы, умножитель, схема управления по отклонению, отрабатывающая ошибку формирования амплитуды тока компенсатора вида 1км 1мн81п р , где 1мн - амплитуда тока в нагрузке, разделительный
трансформатор, причем первичная обмотка трансформатора подключена к выходу инвертора тока, а вторичная предназначена для присоединения параллельно нагрузке, второй датчик тока соединен последовательно с вторичной обмоткой разделительного трансфор матор , вход первого амплитудного детектора и вход первого блока сравнения по,о лючены к выходным зажимам первого датчика тока, а выход первого
амплитудного детектора подключен к первому входу умножителя, второй вход которого подключен к выходу блока функционального пареобразования фазы, входные клеммы которого подсоединены к выходным клеммам датчика фазы, подключенного
входными зажимами к выходам первого и
второго блоков сравнения, вход второго
блока сравнения соединен с выходом датчи-ка напряжения, вход второго амплитудного
детектора подключен к выходу второго датчика тока, а его выход - к первому входу схемы управления по отклонению, второй вход которой подсоединен к выходу умножителя, а третий - к выходу датчика напряжения, выход схемы управления по отклонению подключен к входу формирователя импульсов управления выпрямителем, а вход формирователя импульсов управления инвертором через блок выработки импульсов управления инвертором соединен с выходом датчика напряжения.
25
И о Вход
блока t1
Фиг.г
Фи2.
| Добрусин Л.Д., Павлович А.Г. | |||
| Павлова Т.П | |||
| Тиристорные источники реактивной мощности, Электротехническая промышленность | |||
| Сер | |||
| преобразовательной техники, вып | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ управления статическим источником реактивной мощности | 1973 |
|
SU458920A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Супронович г | |||
| Улучшение коэффициента мощности преобразовательных установок | |||
| - М.: Энергоатомиздат, 1985, с | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| Способ плавного регулирования реактивной мощности | 1971 |
|
SU448536A1 |
