oi «vi
ел
о
00
Изобретение относится к испытаниям ДБС, в частности к устройствам для управления режимами испытаний и контроля параметров двигателя.
Цель изобретения - повышение быстродействия и надежности системы.
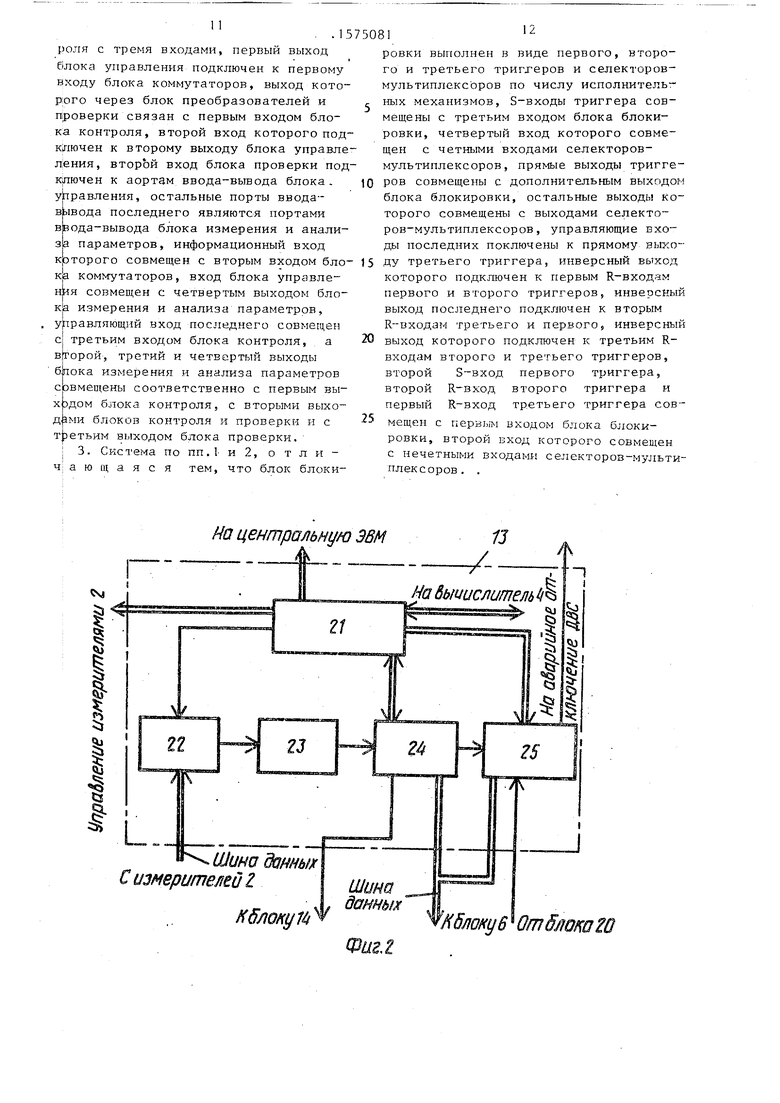
На фгг.1 представлена функциональная схема системы; на фиг.2 - функциселекторы-мультиплексоры 29 по числу исполнительных механизмов 3.
Система для испытания ДВС работает в трех режимах: автоматическом, ручном и режиме подготовки, задание которых осуществляется блоком 16.
В автоматическом режиме последовательность и длительность режимов ра
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| СТАНЦИЯ ДЛЯ ИСПЫТАНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2053492C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| Устройство оперативной связи с управляющими программами | 1981 |
|
SU970351A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ РАДИОТЕЛЕСКОПА | 2006 |
|
RU2319171C1 |
| Устройство для управления энергопитанием микропроцессорной системы | 1983 |
|
SU1201829A1 |
| АНТЕННЫЙ ПОЗИЦИОНЕР | 1992 |
|
RU2060531C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННОЙ ЭЛЕКТРОСТАНЦИЕЙ | 2011 |
|
RU2453980C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
Целью изобретения является повышение надежности системы. Цель достигается за счет введения в систему, содержащую измерители 2 параметров двигателя, исполнительные механизмы 3 и систему управления, снабженную вычислителем 4, средствами ввода-вывода 6 и 7 и пультом 5 управления, блока 13 измерения и анализа параметров двигателя, блока 14 формирования управляющих воздействий и устройства 15 блокировки. Система сохраняет работоспособность при выходе из строя центральной ЭВМ, а обработка сигналов датчиков в блоке 13 позволяет увеличить быстродействие системы. 2 з.п. ф-лы, 3 ил.
ональная схема блока измерения и ана- jg боты двигателя задается программно
ярп
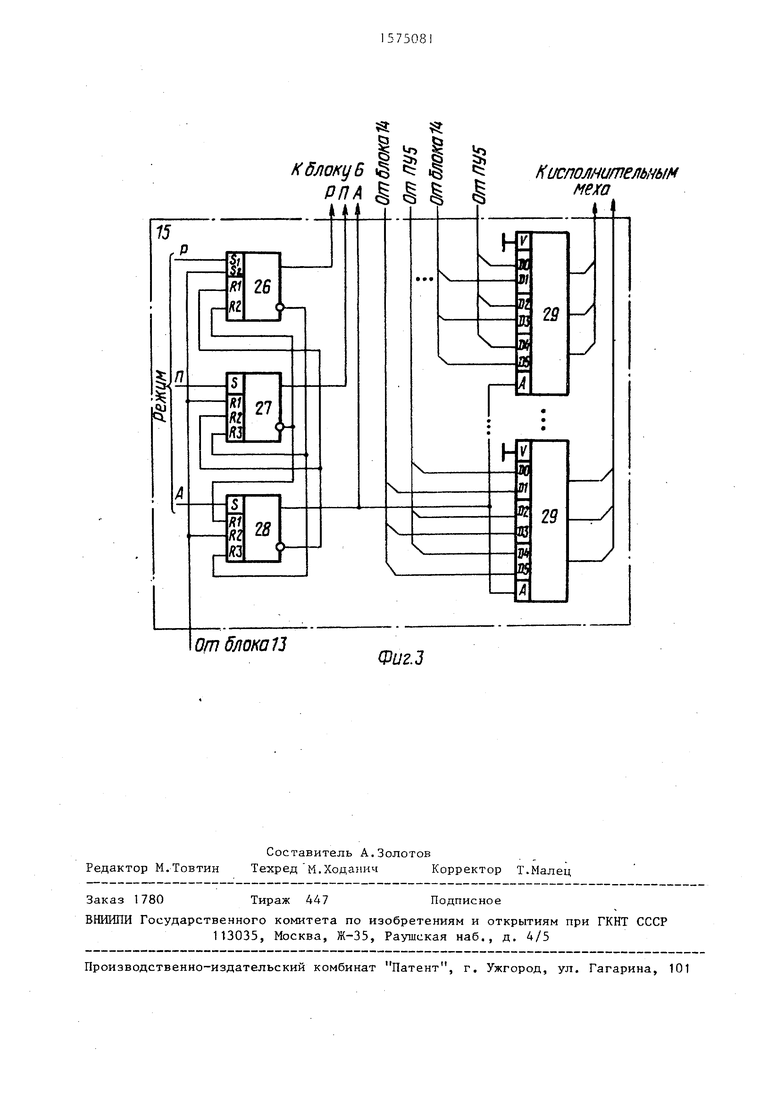
Лиза параметров; на фиг.З - принципи- 4льная схема блока блокировки.
Система для испытания ДВС 1 содер- 1т измерители 2 параметров двигате- 4я, исполнительные механизмы 3 и подключаемую к центральной ЭВМ систему Управления, снабженную вычислителем 4, который соединен с пультом 5 управления через блок 6 ввода и блок 7
15
заранее и отрабатывается вычислителем 4. Программа испытания может бы записана на магнитный носитель.
В ручном режиме работы управляющие воздействия на двигатель задают ся с пульта 5 управления оператором испытателем. Ручной режим работы си темы используется для проведения от ладочных испытаний двигателя, когда
25
30
гателя в произвольной, затэанее непредусматриваемой последовательности.
В режиме подготовки производится работа по подготовке испытаний с записью программы испытания в оперативное запоминающее устройство 8, если подготовленное испытание будет использовано одноразово. Если программа планируется для использования многократно, то она с ОЗУ 8 может пепезаписыв ывода, а также с оперативным заломи- 2Q не°бходимо изменять режимы работы дви- йающим устройством 8 (ОЗУ), постоян- запоминающим устройством 9 (ПЗУ), Запоминающим устройством 10 на магнит- йом носителе, дисплеем 11 и печатающим устройством 12. Система содержит Сток 13 измерения и анализа параметров , соединенный с измерителями 2 параметров двигателя, блоком 6 ввода, вычислителем 4 и центральной ЭВМ, , Первым выходом подключенный к исполнительным механизмам 3, а входом - к пульту 5 управления, блок 14 формирования управляющих воздействий, од- &им входом которого является выход рлока 7 вывода, а другим входом - второй выход блока 13 измерения и Анализа параметров, блок 15 блокировки, входами которого являются выходы пульта 5 управления и блока 14, а также первый выход блока 13, а выходами - входы исполнительных механизмов 3 и один из входов блока 6 Ввода.
Пульт 5 управления выполнен в виде блока 16 задания режима, блоков 17 и 18 функциональной и цифровой клавиатуры соответственно, блока .индикации и блока 20 управления в ручном режиме.
35
40
ваться на магнитный носитель устройства 10.
Измерение параметров двигателя и
их обработка на всех трех режимах осуществляется с помощью блока 13 измерения и анализа параметров в реальном масштабе времени. Программное обеспечение выполнено по модульному принципу и состоит из: программы начального запуска, программы организации последовательного выполнения программы испытаний двигателей супервизора, набора функциональных модулей выполнения элементарных функций, и функциональ- i§ ных таблиц с записанной последовательностью действий, реализующих технологические процессы испытаний. В состав супервизора входят следующие задачи: диспетчер,, задача вывода на заданный режим, задача инициализации сбора информации, задача инициализации контроля параметров, задача работы с функциональной и цифровой клавиатурой, задача обновления таблицы параметров и
13 выполнен в виде блока 21 ия, подключенного к цепочке: коммутаторов - блок 23 измех преобразователей - блок 24 на достоверность информации, „ ПР контроля для распознавания х и предаварийных ситуаций. блокировки содержит первый ой 2.7 и третий 28 триггеры и
их щес ния мас чен пу зап дов пыт ра эле i§ ных нос гич суп ди реж фор ля он ча
50
ют мой
боты двигателя задается программно
заранее и отрабатывается вычислителем 4. Программа испытания может быть записана на магнитный носитель.
В ручном режиме работы управляющие воздействия на двигатель задаются с пульта 5 управления оператором- испытателем. Ручной режим работы системы используется для проведения отладочных испытаний двигателя, когда
5
0
гателя в произвольной, затэанее непредусматриваемой последовательности.
В режиме подготовки производится работа по подготовке испытаний с записью программы испытания в оперативное запоминающее устройство 8, если подготовленное испытание будет использовано одноразово. Если программа планируется для использования многократно, то она с ОЗУ 8 может пепезаписыQ не°бходимо изменять режимы работы дви-
5
0
ПР
ваться на магнитный носитель устройства 10.
Измерение параметров двигателя и
их обработка на всех трех режимах осуществляется с помощью блока 13 измерения и анализа параметров в реальном масштабе времени. Программное обеспечение выполнено по модульному принципу и состоит из: программы начального запуска, программы организации последовательного выполнения программы испытаний двигателей супервизора, набора функциональных модулей выполнения элементарных функций, и функциональ- § ных таблиц с записанной последовательностью действий, реализующих технологические процессы испытаний. В состав супервизора входят следующие задачи: диспетчер,, задача вывода на заданный режим, задача инициализации сбора информации, задача инициализации контроля параметров, задача работы с функциональной и цифровой клавиатурой, задача обновления таблицы параметров и
0
ПР
Все перечисленные задачи компонуются совместно с операционной системой в единый загрузочный модуль.
Записанные на устройство 10 или в ОЗУ 8 программы испытаний имеют вид таблиц, в которых в форме массивов информации записаны сведения о технологическом процессе испытаний (номера режимов испытания , временные характеристики, задание на управление исполнительными механизмами диапазоны измерения и управления, необходимость контроля, регистрации и пр.).
По команде Загрузка с блока 17 осуществляется запуск программы начального запуска, которая переписывается в ОЗУ 8 с магнитного носителя устройства 10 загрузочный модуль и запускает на выполнение супервизор. Супервизор ожидает ввода с блока 18 цифровой клавиатуры номера программы, которую необходимо выполнить. После получения номера программы супервизор считывает заданную программу в ОЗУ 8 и переходит на анализ наличия сведений об испытываемом объекте (номер, модификация, коды применяемых исполнительных механизмов, коды подключенных датчиков и пр. ).
Если сведения не введены, то с помощью блока 18 цифровой клавиатуры производится их ввод в установленной последовательности.
После ввода необходимых данных супервизор переходит в режим ожидания Пуск программы от блока 17 и после его получения начинает последовательно просматривать таблицу и формироват запросы на включение модулей выполнения элементарных функций (например: включить, выключить, измерить, выдать уставку и пр.).
В автоматическом режиме система работает следующим образом.
С блока 16 задания режима работы системы пульта 5 управления сигнал от кнопки автоматического режима поступает на блок 15 блокировки.
На прямом выходе триггера 28 появляется сигнал высокого уровня, обеспечивающий прохождение сигналов управления через селектор-мультиплексор 29 по нечетным входам от блока 14.
Одновременно на одном из выходов блока 15 формируется сигнал высокого уровня (на выходе триггера 28), который через блок 6 поступает в вычислитель 4.
Супервизор, получив сигнал Пуск программы с блока 17, анализирует состояние программы испытания. При
0
наличии режима ожидания продолжения работы после приостанови, происходит включение программ испытания на выполнение с прерванного или с заказанного с блока 18 номера режима. В противном случае программа испытаний выполняется сначала,т.е. супервизор начинает последовательно просматривать таблицу и формировать запросы на . включение модулей, реализующих технологический процесс.
С другой стороны, после получения сигнала Пуск программы супервизор
5 выбирает из нормативно-справочной информации данные, необходимые для работы блока 13 измерения и анализа параметров, а именно: список измеряемых параметров с адресами коммутиру0 емых цепей, уставки для проверки на достоверность и пределы аварийных и предаварийных значений, защищаемых параметров двигателя, и через порты ввода-вывода передает их блоку 21 уп5 равления с командой на запуск задачи измерения в блоке 21. ;
Блок 21 управления, получив сигнал с вычислителя 4, запускает на выполнение программу, записанную в ПЗУ блока 21 управления по ветви опроса параметров аналогового типа, измерители 2 которых подключены к блоку 22 коммутаторов. Программа просматривает таблицу параметров и в соответствии с адресами последовательно коммутирует необходимые измерители. Сигналы проходят через блок 23 измерительных преобразователей, где преобразуются в стандартный сигнал (0-5 мА, 0-10 В)г на блок 24, где записываются в буфер памяти и в блок управления выдается сигнал, увеличивающий на единицу содержимое счетчика количества измерений. Программа блока 13 анализирует счетчик количества измерений и, если он не исчерпан, выдает сигнал на повторное измерение. При заполнении буфера памяти в блоке 24 происходит усреднение данных всех измерений, а результат сравнивается с пределами уставок для каждого параметра, получаемых с блока 21 управления. При соответствии результатов измерения уставкам последние выдаются через второй выход блока 19 и блок 6 ввода в вычислитель 4 и записываются в ОЗУ 8. Кроме того, данные измерения параметров управления выделяются из общего
0
S
0
5
0
5
Массива полученных данных и передают- йя на блок 14.
Таким образом, в ОЗУ 8 всегда хра- ihiTCH текущая информация о параметрах Двигателя с задержкой на время цикла их опроса.
В V4ae выявления недостоверных параметров их коды передаются в блок 21 управления для повторения измере- Иия. При повторном определении недостоверности параметров через второй выход блока 2 и блок 6 ввода в вычислитель 4 передаются их коды с призраком недостоверности для принятия |решения по продолжению испытания.
Параметры, для измерения которых необходимы запуск, измеритель или длительные интервалы времени (расход топлива, расход воздуха, расход кар- :терных газов, дымность, и т.д.) опра- |шиваются при необходимости, задаваемой вычислителем 4 через первый выход блока 13. При выходе из строя вычислителя 4 информация выдается через блок 13 на центральную ЭВМ, где распечатывается в виде протокола.
Все параметры, включенные в систему аварийной и предаварийной защиты с блока 24 передаются на блок 25, где проверяются на соответствие аварийным и предаварийным уставкам, полученным с блока 21 управления.
В случае обнаружения аварийного параметра блок 25 выдает команду на исполнительные механизмы аварийного останова двигателя переводит систему в ручной режим работы с помощью блока 15 блокировки и передает значения аварийных параметров через блок 6 вво да в вычислитель 4 для отработки программ аварийного завершения испытаний и индикации аварийного состояния на блоке 19 индикации пульта 5.
В случае обнаружения предаварий- ных значений параметров информация передается через второй выход блока 13 и блок 6 ввода в вычислитель 4 для принятия решений по дальнейшей работе системы.
Для установления заказанного в таблице режима нагружения ДВС, вычислитель 4 через блок 7 вывода выдает на блок 14 формирования управляющих воз- ее действий значения необходимых параметров управления (например, частота вращения коленчатого вала двигателя и крутящий момент).
0
5
0
5
0
5
0
45
50
ее
Получив с блока 13 информацию о текущих значениях -параметров управления, блок 14 разделяет ее по типам исполнительных механизмов и сравнивает с уставками, полученными с вычислителя 4. При несоответствии уставкам в блоке 14 происходит вычисле ние величины управляющего воздействие и преобразование его в вид, необходимый для управления конкретным исполнительным механизмом. Полученное управляющее воздействие выдается в устройство 15 блокировки и, пройдя через соответствующий селектор-мультиплексор 29, передается на соответствующий исполнительный механизм.
При соответствии полученных величин параметров уставкам управляющие воздействия не выдаются. Таким образом управляющая цепочка двигатель 1 - измерители 2 - блок 13 - блок 14 - блок 15 исполнительные механизмы 3 работает непрерывно, тем самым осуществляя установление и поддержание с необходимой точностью режимов работы двигателя 1, задаваемых вычислителем 4.
Текущая информация о состоянии двигателя периодически записывается в ОЗУ 8.
Оператор системы имеет возможность визуального контроля состояния двигателя с помощью индикаторного табло, или дисплея 1, где непрерывно индицируется информация о частоте вращения коленчатого вала двигателя и крутящем моменте, а также сигнализируются в процессе испытания все отклонения па- ,раметров от нормы. При этом с помощью блоков 17 и 18 оператор имеет возможность получить значение любого параметра системы на индикаторном табло или дисплее 11. Когда по программе требуется измерять параметры, не включенные в таблицу на периодический опрос (расход топлива, расход воздуха и пр.), вычислитель 4 выдает в блок 13 команду блока 16 управления. Результат записывается в ОЗУ 8.
Для увеличения надежности системы предусмотрен специальный комплекс технических и программных средств, который работает следующим образом.
С дискретностью Ј между вычислителем 4 и блоком 16 управления происходит обмен сигналами контроля. При получении сигнала каждый из абонентов делает вывод о том, что блок, с кото
-
,
рым он связан, работоспособен. Неполучение сигнала контроля одним из абонентов говорит о том, что блок, который не выдает этот сигнал, нера- ботоспособен. Если неработоспособен блок 21 управления, то для окончания испытаний вычислитель 4 переходит в работу в аварийном режиме, т.е. вычислитель выполняет функции блока 21 управления. При выходе из строя вычислителя 4, сигналы об его отказе передаются в центральную ЭВМ, которая начинает принимать и распечатывать информацию с блока 13, а система переводится в ручной режим.
Для работы в ручном режиме необходимо на блоке 16 пульта 5 управления нажать кнопку Ручной режим, при этом сигнал запоминается с помощью тригге ра 26 и передается через блок 6 ввода информации в вычислитель 4.
Сигнал низкого уровня, сформированный на прямом выходе триггера 28, попадая на управляющие входы селекторов мультиплексоров 29, запрещает прохождение сигналов управления с блока 14 и разрешает прохождение сигналов с панелей управления исполнительных механизмов 3 блока 20 управления в ручном режиме. При этом вычислитель 4 работает с блоком 13 как и в автоматическом- режиме, но управляющие сигналы не выдаются.
При нажатии на блоке 16 кнопки Подготовка вычислитель 4, получив сигнал с триггера 27, включает программу подготовки таблицы режимов испытаний с использованием дисплея 11 и языка оператора.
Оператор на экране составляет технологический процесс подготавливаемых испытаний с помощью специального языка подготовки. Программа, обрабатывая текст, записывает его в виде массивов информации на языке ЭВМ, на которой производится реализация технологического процесса. Полученная таблица (массив) может быть записана в
ОЗУ и выполняться сразу же после под- 50 формационным входам исполнительных
готовки или на магнитный носитель, при этом ей присваивается порядковый номер для обеспечения возможности многократного повторения подготовленного технологического процесса. Формула изобретения
15
20
25
5 Q
измерители параметров двигателя., исполнительные механизмы с информационными и управляющими входами и подключаемую к электронно-вычислительной машине систему управления, снабженную вычислителем с портами ввода-вывода информации, который соединен через блоки ввода-вывода информации с пультом управления, а также с оперативным запоминающим устройством, постоянным запоминающим устройством, запоминающим устройством на магнитном носителе, дисплеем и печатающим устройством, отличающаяся тем, что, с целью повышения быстродействия и надежности, в систему введены блок измерения и анализа параметров с портами ввода-вывода, информационным и управляющим входами, и тремя выходами, блок формирования управляющих воздействий с двумя входами и одним выходом и блок блокировки с четырьмя входами-выходами по числу исполнительных механизмов и дополнительным выходом, причем блок измерения и анализа параметров через порты ввода-вывода подключен к электронно-вычислительной машине и вычислителю, информационным входом подключен к выходам измерителей, входы которых связаны с первым выходом блока измерения и анализа параметров, второй выход последнего связан с управляющими входами исполнительных механизмов и первым входом блока блокировки, третий и четвертый выходы блока измерения и анализа параметров подключены соответственно к дополни40 тельному входу блока ввода и первому входу блока формирования управляющих воздействий, второй вход которого г подключен к выходу блока вывода, а его выход соединен с вторым входом
45 блока блокировки, третий и четвертый входы последнего связаны с пультом управления, дополнительный выход блока блокировки связан с блоком ввода, а остальные выходы подключены к ин
30
J5
механизмов.
.2. Система поп.1, отличаю- щ а я с я тем, что блок измерения и анализа параметров выполнен в виде 55 блока управления с портами ввода-вывода, тремя выходами и входом, бло-( ка коммутаторов с двумя входами, бло- ка преобразователей, блока проверки с двумя входами и выходами и блока контроля с тремя входами, первый выход блока управления подключен к первому входу блока коммутаторов, выход которого через блок преобразователей и проверки связан с первым входом блока контроля, второй вход которого подключен к второму выходу блока управле- ления, второй вход блока проверки подключен к аортам ввода-вывода блока . управления, остальные порты ввода- вывода последнего являются портами врода-вывода блока измерения и анали- параметров, информационный вход
крторого совмещен с вторым входом бло- 15 ДУ третьего триггера, инверсный выход
ка коммутаторов, вход блока управле- н|ия совмещен с четвертым выходом блока измерения и анализа параметров, управляющий вход последнего совмещен с1 третьим входом блока контроля, а второй, третий и четвертый выходы бЬока измерения ч анализа параметров совмещены соответственно с первым вы- х)эдом блока контроля, с вторыми выхо- блокив контроля тл проверки и с третьим выходом блока проверки,
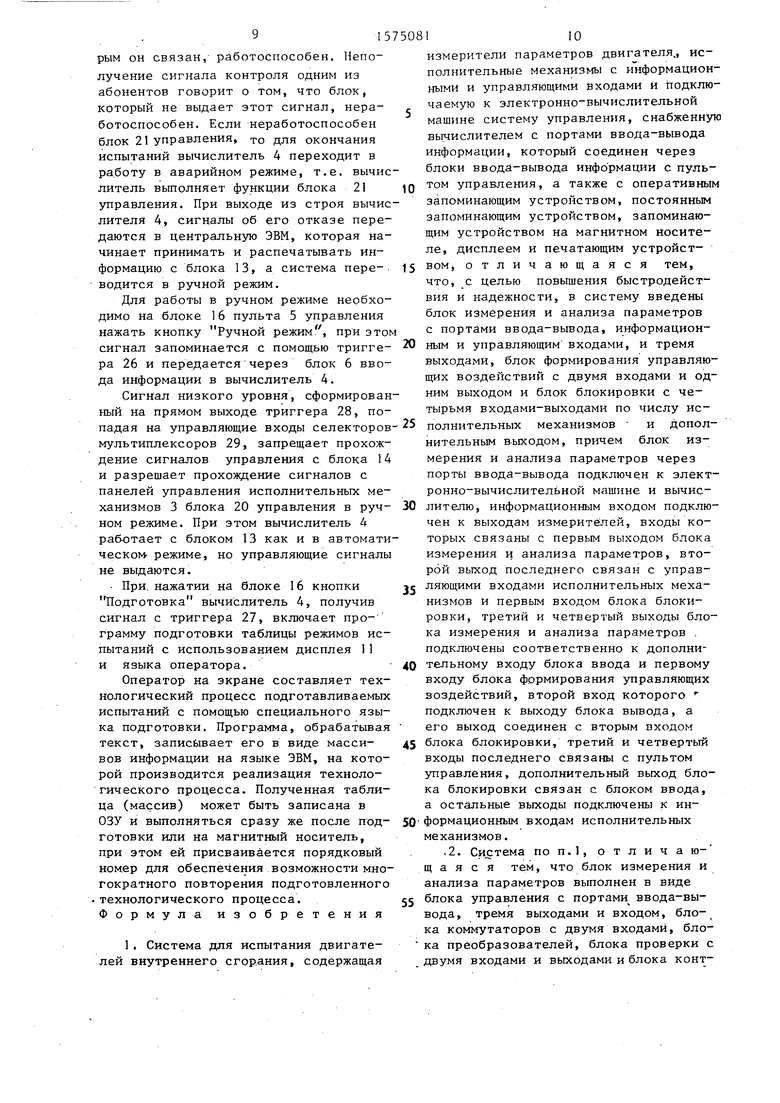
ровки выполнен в виде первого, второго и третьего триггеров и селекторов- мультиплексоров по числу исполнительных механизмов, S-входы триггера совмещены с третьим входом блока блокировки, четвертый вход которого совмещен с четными входами селекторов- мультиплексоров, прямые выходы триггеров совмещены с дополнительным выходом блока блокировки, остальные выходы которого совмещены с выходами селекто- ров-мультиппексоров, управляющие входы последних поключены к прямому выхо
5
которого подключен к первым R-входам первого и вюрого триггеров, чнвеосный выход последнего подключен к вторым R-входам третьего и первогоs инверсный выход которого подключен к третьим R- входам второго и третьего триггеров, вюрой первого триггера, второй R-вход второго триггера и первый R-вход третьего триггера совмещен с первым входом блока блокировки, второй ьход которого совмещен с нечетными входами селекторов-мультиплексоров. .
tj
: to §
к едоку в 1 § I §
Ј
Qm блока 11
tj
«
: to §
Hисполнительным меха
Фиг.З
| Филимонов А.И | |||
| и др | |||
| Применение автоматизированных систем управления стендовыми испытаниями автотракторных двигателей в ФРГ, М, 1981, Сер.Тракторы, самоходные шасси и двигатели, агрегаты и узлы: ЦНИИТЭИтракторсель- маш, вып.19, с.11-13. |
