Изобретение относится к самолетам, оборудованным процессорными управляющими комплектами, обеспечивающими приведение в действие органов управления самолетом, изменяющих или поддерживающих его положение во время полета.
Известны самолеты с системами управления, выполненными с вычислительной частью, в состав которой входят процессоры, включенные в структуру комбинированного информационного обмена с мультиплексными, локальными и общими шинами передачи данных, а также узлы ввода информации, связанные с датчиками положения органов управления и полетных параметров, и узлы вывода управляющих сигналов, подключенные к исполнительным органам (US 5979835 А, В 64 С 13/06, 09.11.1999; ЕР 0867362 А2, В 64 С 13/40, 30.09.1998; ЕР 0953504 A1, B 64 С 13/16, 03.11.1999; FR 2777535 A1, В 64 С 13/16, 22.10.1999; RU 2101755 С1, G 06 F 7/00, 10.01.1998).
Недостатки известных самолетов определяются низкой эффективностью управления, не обеспечивающей предотвращение выхода самолета на критические режимы полета.
Наиболее близким к предложенному является самолет с системой управления, включающей в себя вычислительную часть с резервированным процессорным определением локальных сигналов управления в зависимости от сигналов сенсоров вводимых летчиком команд, разветвленную сеть из линий передачи данных, согласующие устройства и исполнительные органы с индивидуальными для управляемых элементов приводами (WO 01/93039 А1, G 06 F 11/16, 06.12.2001).
Недостаток указанного самолета заключается в ограниченных функциональных возможностях системы управления. Она не обеспечивает, в частности, требуемые характеристики устойчивости и управляемости во всей эксплуатационной области высот и скоростей полета и углов атаки при заданной номенклатуре внешних подвесок, автоматическое ограничение предельных эксплуатационных значений угла атаки и нормальной перегрузки, ограничение отклонения руля направления в зависимости от скоростного напора, автоматическое управление отклоняемыми носками крыла в зависимости от текущего угла атаки и положения закрылков, управление закрылками, а также репрограммирование характеристик устойчивости и управляемости для подготовки летного состава к полетам на различных типах самолетов.
Задачей изобретения является создание самолета с системой управления, обладающей расширенными функциональными возможностями.
Для решения поставленной задачи предложен легкий многоцелевой самолет с системой управления, которая содержит комплексную систему управления (КСУ), состоящую из:
четырехкратно резервированной цифровой вычислительной части с блоками питания и контроля, датчиками и пультами управления;
четырехкратно резервированных по электрической части и двукратно по гидравлической части электрогидравлических рулевых приводов, два из которых установлены в канале крена и один - в канале направления;
четырехкратно резервированного по электрической части и двукратно по гидравлической части электрогидравлического рулевого привода стабилизатора;
вращательного электрогидравлического привода закрылков;
трехпозиционных гидравлических цилиндров привода носков крыла;
электрогидравлических кранов управления отклоняемыми носками крыла;
привода тормозного щитка;
посты управления первой и второй кабины, механически связанные между собой;
механизмы триммерного эффекта по каналам тангажа, крена и направления;
пульты управления КСУ;
гибкие валы управления закрылками;
планетарные редукторы-шарниры выпуска-уборки закрылков;
систему управления тормозным щитком.
При этом каждый канал вычислительной части комплексной системы управления выполнен с возможностью расчетного определения сигналов управления по структуре “канал-модель” и содержит последовательно включенные:
устройство преобразования сигналов датчиков;
устройство контроля датчиков с элементами, выполняющими функции приема входной информации;
устройство вычислительное, в котором размещены решающий и модельный процессоры, цифроаналоговые преобразователи и регистры разовых команд;
устройство управления приводами, обеспечивающее замыкание внутренних контуров одного канала всех приводов, усиление по току и напряжению команд на электрогидроклапаны, выдачу сигналов обратных связей в цифровой вычислитель контроля приводов;
устройство контроля работы вычислительной части;
устройство вторичного питания, выполненное с возможностью формирования стабилизированного напряжения и связанное по цепям питания с электрическими устройствами и датчиками комплексной системы управления.
Решению поставленной задачи соответствуют частные существенные признаки изобретения.
В системе управления самолета в каждом канале вычислительной части комплексной системы управления устройство преобразования сигналов представляет собой набор операционных усилителей, преобразователей уровня и мультиплексоров-уплотнителей информации, включенных с возможностью:
фазочувствительного выпрямления сигналов с индукционных датчиков;
развязки между датчиками и устройством контроля датчиков;
масштабирования входных сигналов;
высокочастотной фильтрации.
В системе управления самолета в каждом канале вычислительной части комплексной системы управления устройство контроля датчиков содержит аналого-цифровой преобразователь и выполнено с возможностью предварительной обработки оцифрованных входных аналоговых сигналов и разовых команд с:
определением соответствия входных сигналов их рабочим диапазонам и формированием признаков их исправности для дальнейших вычислений;
реализацией фильтров упругих колебаний по сигналам угловых скоростей;
вычислением высотно-скоростных параметров;
вычислением сигналов управления стабилизатором, элеронами, рулем направления, носками крыла, закрылками по алгоритмам управления режима “резервный”;
вычислением ограничительных сигналов для взлетно-посадочной конфигурации самолета;
распределением сигналов в ячейки оперативного запоминающего устройства для передачи во внешние устройства.
В системе управления самолета в каждом канале вычислительной части комплексной системы управления устройство вычислительное содержит приемники для контроля работы линии передачи, входы которых связаны с соответствующими выходами устройства контроля датчиков, а выходы - с соответствующими входами оперативного запоминающего устройства, а также процессор “канала” и процессор “модели”, связанные с выходами оперативного запоминающего устройства через индивидуальные приемники информационных данных.
В системе управления самолета в устройстве вычислительном каждого канала вычислительной части комплексной системы управления процессор канала выполнен с возможностью:
выборки достоверных входных сигналов из четырех принятых массивов данных от устройства контроля датчиков четырех резервов;
вычисления управляющих и ограничительных сигналов в соответствии с заданными алгоритмами управления в режиме “основной”;
выдачи вычисленных управляющих сигналов через цифроаналоговые преобразователи в контуры управления исполнительными приводами;
выдачи дискретных разовых команд исправности вычисленных управляющих сигналов;
выдачи сигналов, необходимых для трансляции во внешние потребители, через скоростной передатчик последовательного двухполярного кода;
контроля вычислений сравнением результатов с аналогичными данными, рассчитанными в процессоре “модели”.
В системе управления самолета в устройстве вычислительном каждого канала вычислительной части комплексной системы управления процессор “модели” выполнен с возможностью:
выборки достоверных входных сигналов из четырех принятых массивов данных от устройства контроля датчиков четырех резервов;
вычисления управляющих и ограничительных сигналов в соответствии с заданными алгоритмами управления (режим “основной”);
выдачи дискретных разовых команд исправности вычисленных управляющих сигналов;
выдачи сигналов в виде последовательного кода из встроенного последовательного порта в устройство управления приводами для обеспечения входной информацией цифрового вычислителя контроля приводов, входящего в состав устройства управления приводами;
контроля вычислений сравнением результатов с аналогичными данными, рассчитанными в процессоре - “канале”.
В системе управления самолета в каждом канале вычислительной части комплексной системы управления устройство управления приводами содержит набор усилителей мощности, включенных с возможностью усиления входных сигналов, поступивших с цифроаналогового преобразователя устройства вычислительного, и выдачи тока управления, пропорционального поступившим входным сигналам, в обмотки управления электрогидроусилителей соответствующих приводов, а также преобразующие и масштабирующие усилители для приема и замыкания внутренних контуров исполнительных приводов, преобразователи уровня и усилители мощности разовых команд включения электрогидроклапанов рулевых приводов, элементы переключения режимов работы “основной” и “резервный”.
В системе управления самолета в каждом канале вычислительной части комплексной системы управления устройство контроля работы вычислительной части выполнено с возможностью оперативного поиска отказавшей съемной единицы, тест-контроля комплексной системы управления, выполнения регулировок и направления параметров на внешние цифровые индикаторы.
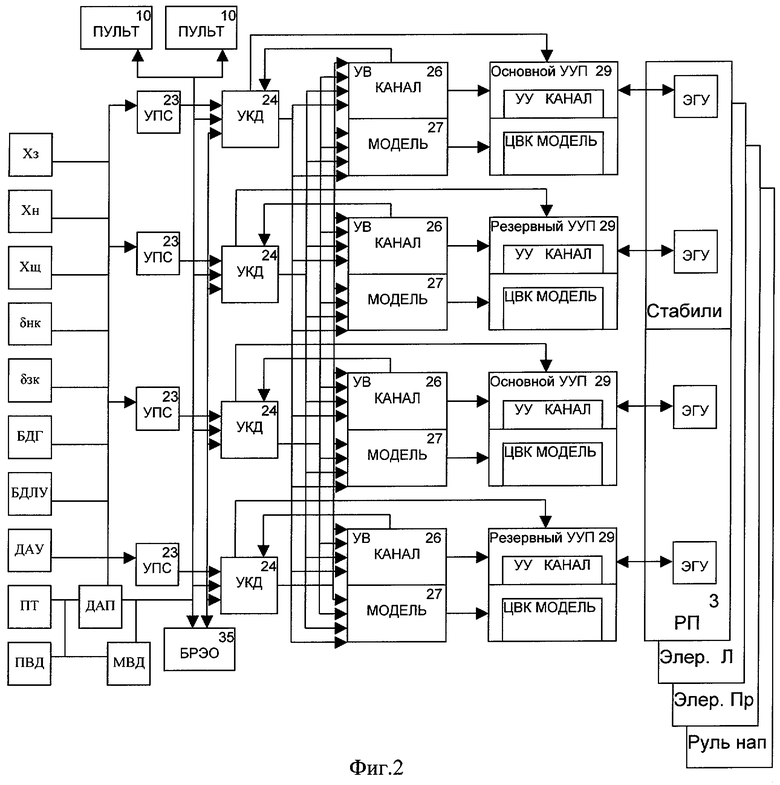
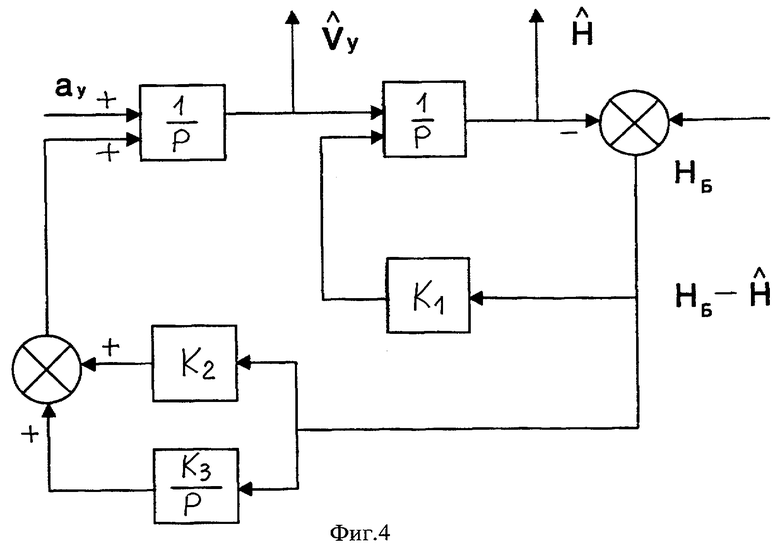
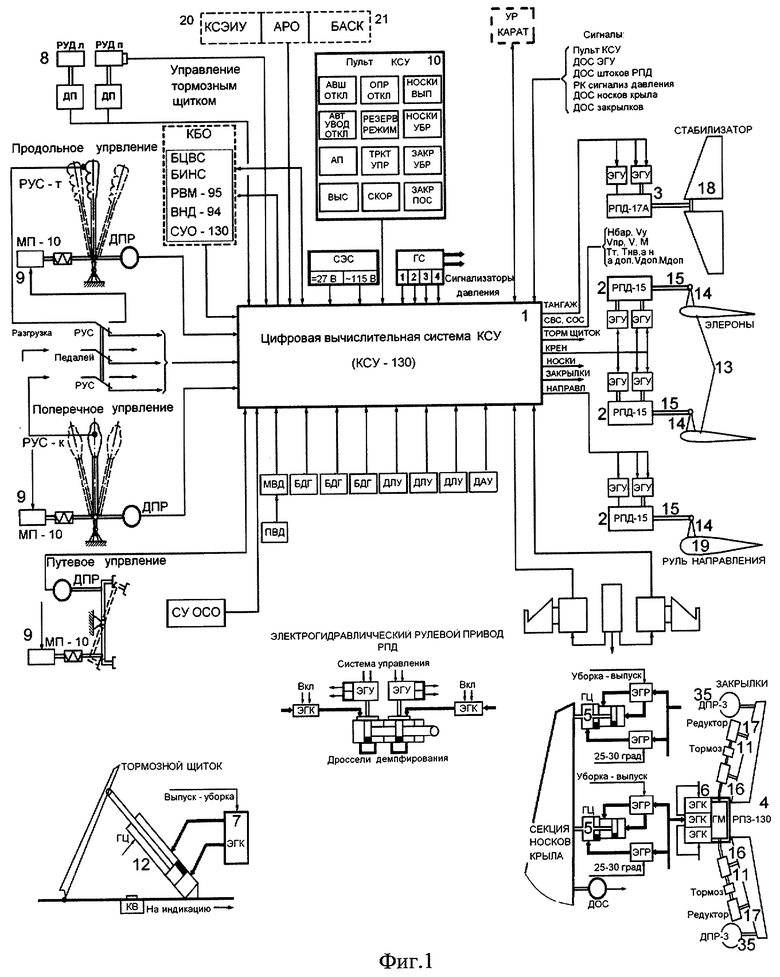
На фиг.1 представлена общая структура построения системы управления предложенного самолета, на фиг.2 - функциональная схема входящей в данную структуру комплексной системы управления, на фиг.3 – блок-схема вычислительной части комплексной системы управления, а на фиг.4 - в качестве примера иллюстрация алгоритма комплексной обработки информации по высоте и вертикальному ускорению.
Система управления (СУ) предназначена для:
управления стабилизатором, элеронами и рулем направления от ручки управления и педалей;
управления носками крыла, закрылками и тормозным щитком;
обеспечения требуемых характеристик устойчивости и управляемости самолета во всей эксплуатационной области высот скоростей, углов атаки и перегрузок;
автоматического ограничения предельных параметров режимов полета;
измерения воздушных параметров и формирования сигналов текущих и предельных значений высотно-скоростных параметров;
автоматического и директорного управления самолетом;
репрограммирования характеристик устойчивости и управляемости самолета.
В состав системы управления включены:
1. Комплексная система управления, в которую входят:
четырехкратно резервированная цифровая вычислительная часть 1 с блоками питания и контроля, датчиками и пультами управления;
четырехкратно резервированные по электрической части и двукратно по гидравлической части электрогидравлические рулевые приводы 2 (РПД-15А) два в канале крена и один в канале направления;
четырехкратно резервированный по электрической части и двукратно по гидравлической части электрогидравлический рулевой привод 3 стабилизатора (РПД-17А);
вращательный электрогидравлический привод 4 закрылков (РПЗ-130);
трехпозиционные гидравлические цилиндры привода 5 носков крыла;
электрогидравлические краны управления (ЭГК) 6 отклоняемыми носками крыла;
привод 7 тормозного щитка.
2. Посты управления 8 первой и второй кабины, механически связанные между собой.
3. Механизмы триммерного эффекта 9 по каналам тангажа, крена и направления (МП-10С6А14).
4. Пульты управления 10 КСУ.
5. Гибкие валы управления закрылками (на фиг.1 не показаны).
6. Планетарные редукторы-шарниры 11 выпуска-уборки закрылков (РШ-43).
7. Система управления 12 тормозным щитком.
В предложенном самолете в системе управления предусмотрен переход вручную с пульта управления КСУ на резервное программное обеспечение в случае отказа основного.
Трехпозиционные цилиндры приводов отклоняемых носков крыла расположены в крыле в зоне первого лонжерона перпендикулярно оси вращения носков и непосредственно связаны с ними. Приводы 2 элеронов расположены вдоль третьего лонжерона крыла и связаны с элеронами 13 через качалку 14 и тягу 15. Приводимые от расположенного в фюзеляже привода 4 при помощи гибких валов шарнир-редукторы 11 установлены на пятом лонжероне крыла и связаны с закрылками приводными рычагами 16 и тягами 17. Привод 3 горизонтального оперения установлен по оси симметрии в хвостовой части фюзеляжа на силовой балке, обеспечивающей силовое замыкание усилий, развиваемых приводом, и передающей на фюзеляж только реакцию от шарнирного момента, и непосредственно связан с горизонтальным оперением 18. Привод 2 руля направления расположен в хвостовой части фюзеляжа под углом к оси симметрии и непосредственно связан с рулем 19.
Сигнализация о работе системы управления осуществляется с использованием речевого оповещения на многофункциональных цветных индикаторах (МФЦИ) 20, табло 21 системы аварийной сигнализации (САС) и на светосигнализаторах пультов управления 10 КСУ.
Комплексная система управления (фиг.2) является цифровой четырехканальной системой. КСУ - многопроцессорная распределенная система, использующая принцип конвейерной обработки информации.
В каждом канале процесс вычисления основных сигналов управления построен на принципе “канал-модель”
В вычислительной части “канала” (фиг.3) внешний контур привода замкнут через цифровую систему. Замыкание внутреннего контура привода - аналоговое. “Ядром” канала является цифровая вычислительная система (ЦВС) 22. В состав ЦВС 22 входят:
устройство преобразования сигналов (УПС) 23;
устройство контроля датчиков (УКД) 24, в котором размещены элементы, выполняющие функции приема входной информации;
устройство вычислительное (УВ) 25, в котором размещены решающий 26 и модельный 27 процессоры, цифроаналоговые преобразователи (ЦАП) 28 и регистры 29 разовых команд;
устройство управления приводами (УУП) 30, обеспечивающее замыкание внутренних контуров одного канала всех приводов, усиление по току и напряжению команд на электрогидроклапаны, выдачу сигналов обратных связей в цифровой вычислитель контроля приводов (ЦВК) 31, конструктивно входящий в состав УУП 30;
устройство контроля (УК) 32 работы вычислительной части;
устройство вторичного питания (УП) 33, обеспечивающее питание электрических устройств и датчиков КСУ, стабилизированным напряжением.
Входные аналоговые сигналы с информационных датчиков и разовые дискретные команды (от концевых выключателей, переключателей режимов, командных задатчиков) поступают в устройство преобразования сигналов 23, представляющее из себя набор операционных усилителей, преобразователей уровня и мультиплексоров-уплотнителей информации, выполняющих следующие функции:
фазочувствительное выпрямление сигналов с индукционных датчиков;
развязку между датчиками и АЦП 34;
масштабирование входных сигналов для максимального использования разрядной сетки АЦП 34;
высокочастотную фильтрацию.
После обработки аналоговые сигналы поступают на четыре мультиплексора, выход каждого из них подключен к входу АЦП 34, входящему в состав устройства УКД 24.
В устройстве УКД 24 проводится предварительная обработка оцифрованных входных аналоговых сигналов и разовых команд, а именно:
определение соответствия входных сигналов их рабочим диапазонам и формирование признаков их исправности для дальнейших вычислений;
реализация фильтров упругих колебаний (ФУК) по сигналам угловых скоростей;
вычисление высотно-скоростных параметров;
вычисление сигналов управления стабилизатором, элеронами, рулем направления, носками крыла, закрылками по алгоритмам управления режима “резервный”;
вычисление ограничительных сигналов для взлетно-посадочной конфигурации самолета;
распределение (упаковка) сигналов в ячейки ОЗУ 35 для передачи во внешние устройства (передатчики сигналов последовательного биполярного кода, мультиплексный канал передачи, скоростной канал внутреннего интерфейса) и на следующий уровень обработки (в устройство УВ 25).
Принятые и прошедшие предварительную обработку в УКД 24 сигналы передаются для проведения основных вычислительных операций в устройство УВ 25. Передача данных осуществляется аппаратно под управлением контроллера последовательным двуполярным кодом.
Максимальная длина передаваемого массива - 255 слов. Ориентировочное максимальное время передачи всего массива ~2 мс.
Массив передачи можно формировать с различной частотой обновления параметров.
В УВ 25 каждого резерва информация от четырех устройств УКД 24 принимается на специальные приемники, осуществляющие оценку бита четности (контроль работы линии передачи), и по результатам этой оценки осуществляется запись принятых информационных слов в ОЗУ 35 двойного доступа для дальнейшей обработки процессором УВ 25.
Для исключения общей аппаратной точки в УВ 25 устанавливаются отдельные приемники для процессора 26 “канала”, решающего управляющую задачу, и для процессора 27 “модели”, решающего контрольную задачу. Управляющий процессор 26 (“канал”) УВ выполняет следующие функции:
выборку достоверных входных сигналов из четырех принятых массивов данных от УКД 24 четырех резервов;
вычисление управляющих и ограничительных сигналов в соответствии с заданными алгоритмами управления (режим “основной”);
выдачу вычисленных управляющих сигналов через ЦАП 28 в контуры управления исполнительными приводами;
выдачу дискретных разовых команд исправности вычисленных управляющих сигналов;
выдачу сигналов, необходимых для трансляции во внешние потребители, через скоростной передатчик последовательного двуполярного кода (дисциплина аналогична передатчикам УКД: 41-битная передача);
контроль вычислений сравнением результатов с аналогичными данными, рассчитанными в процессоре 27 “модели”.
Контрольный процессор 27 “модели” УВ выполняет следующие функции:
выборку достоверных входных сигналов из четырех принятых массивов данных от УКД четырех резервов;
вычисление управляющих и ограничительных сигналов в соответствии с заданными алгоритмами управления (режим “основной”);
выдачу дискретных разовых команд исправности вычисленных управляющих сигналов;
выдачу сигналов в виде последовательного кода из встроенного последовательного порта в устройство управления приводами 30 для обеспечения входной информацией устройства ЦВК 31, входящего в состав УУП 30;
контроль вычислений сравнением результатов с аналогичными данными, рассчитанными в процессоре 26 “канала”.
Контроль данных в УВ 25 осуществляется на разных сечениях, что обеспечивает возможность постепенной деградации функций КСУ за счет отключения или реконфигурирования отдельных составляющих конечного алгоритма управления (составляющие САУ могут быть отключены, сигналам СВС могут быть присвоены постоянные значения и т.п.).
Сигналы, сформированные в УВ 25, поступают в устройство управления приводами 30. УУП 30 содержит набор усилителей мощности, обеспечивающих усиление входных сигналов, поступивших с ЦАП 28 УВ 25, и выдачу тока управления, пропорционального поступившим входным сигналам, в обмотки управления электрогидроусилителей соответствующих приводов. В состав УУП входят преобразующие и масштабирующие усилители для приема и замыкания внутренних контуров исполнительных приводов, а также преобразователи уровня и усилители мощности разовых команд включения электрогидроклапанов 6 рулевых приводов, элементы переключения режимов работы “основной”, “резервный”. Команды на включение ЭГК 6 формируются в ЦБК на основании результатов контроля контуров приводов.
Контроль контура привода простроен по принципу “канал-модель”, в котором значение входного сигнала (заданного положения золотника) “проходит” через математическую модель и сравнивается с реальным положением золотника рулевого механизма (РМ).
Такой контроль обеспечивает работоспособность четырехканального привода до четвертого отказа.
В каждом конструктивно-функциональном модуле (КФМ) КСУ на протяжении всего времени работы реализуются специальные тестовые программы, которые включают проверку работы АЦП за счет оцифровки эталонных источников напряжения, контроль выходных сигналов ЦАП - за счет замыкания линий выходных сигналов на входы АЦП (эхо-контроль), эхо-контроль выходных РК, эхо-контроль передатчиков последовательного кода. Для проверки обновления информации на линиях межмодульных интерфейсов в массивы выходных передатчиков вводятся специальные тестовые параметры, изменяющиеся по определенным законам. Кроме того, полетный тест включает в себя контроль работы процессоров (проверка выполнения операций), тест ОЗУ (проверка записи-чтения), тест ПЗУ (проверка контрольных сумм).
В целях проведения наземного обслуживания в состав КСУ введен дополнительный КФМ.
Устройство контроля (УК) решает следующие задачи:
оперативный поиск отказавшей съемной единицы;
тест-контроль КСУ;
выполнение некоторых регулировок;
индикация параметров на внешние цифровые индикаторы.
Отображение результатов контроля или каких-либо параметров СДУ осуществляется на двенадцати цифровых индикаторах, расположенных на передних рамках вычислительных устройств КСУ, а так как вычислительные устройства расположены в контейнере рядом, то данные цифровые индикаторы образуют единое двенадцатизначное табло.
Задание той или иной программы обслуживания осуществляется нажатием кнопок, расположенных на передней рамке УК (цифровые от “0” до “9”, а также “ENTER”, “ESC”, “SHIFT”), которые позволяют осуществлять запуск и работу во всех режимах работы при наземном обслуживании.
Для исключения возможности несанкционированной выдачи тестов в КСУ в полете цепи тестовых сигналов блокированы аппаратно сигналами обжатия шасси. Кроме того, предусмотрены и программные блокировки тест-контроля.
В конструкции устройств предусмотрены стандартные порты асинхронного обмена по протоколу М-232С для каждого процессора, используемые для загрузки и отладки рабочих программ, тестирования ПО и аппаратуры в ходе проведения отработки и диагностики.
Сообщения об отказах в КСУ или смежном оборудовании передаются по каналам мультиплексного обмена информацией, либо по линиям передачи последовательного биполярного кода в соответствии с ГОСТ 18977-79. Данные сообщения формируются на многофункциональных пультах индикации МФЦИ изделия и на светосигнальных табло. Формирование признаков отказов осуществляется в КСУ на основании результатов полетного контроля.
Система КСУ является потребителем первой категории и питается от двух шин постоянного тока напряжением +27V по ГОСТ 19705-89, подпитываемых, в свою очередь, аккумуляторами.
Четыре импульсных блока питания, каждый из которых конструктивно состоит из двух КФМ, расположенных в контейнере КСУ, вырабатывают стабилизированные напряжения питания +15V, +5V, +6V и +12V для питания электронных устройств и датчиков КСУ.
Гиромоторы датчиков угловых скоростей, входящих в состав блока ДУС (БДГ-30), питаются от встроенного в блок статического преобразователя. Питание статического преобразователя осуществляется также от сети +27V.
На функциональной схеме КСУ (фиг.2) показаны:
отказоустойчивая вычислительная система из четырех идентичных вычислителей с блоками питания;
четырехканальные по электронной части и дублированные по гидропитанию электрогидравлические рулевые приводы следующих поверхностей:
элероны 13(2 шт.),
руль направления 19 (1шт),
стабилизатор 18 (1 шт);
пульт управления 10 КСУ (2 шт);
датчики положения резервированные 36 (9 шт);
датчики линейных ускорений (12 шт);
датчики угловых скоростей (12 шт);
датчики измерения воздушных данных (ДАП-3-1 - 2 шт, ДАУ-19-2 - 1 компл, ПВД-2С - 2 шт, П-104М - 2 шт, МВД-Д1 - 2 шт, БКО-2 - 1 шт).
Комплексная система управления обеспечивает:
требуемые характеристики боковой и продольной устойчивости и управляемости самолета во всей эксплуатационной области высот и скоростей, углов атаки и перегрузок с учетом и без учета подвесок;
требуемые характеристики устойчивости и управляемости в режиме “дозаправка в воздухе”;
автоматическое ограничение предельных эксплуатационных значений угла атаки (α доп), нормальной перегрузки (nу доп), максимальной приборной скорости объекта (путем управления тормозным щитком), автоматическое ограничение отклонения руля направления в соответствии с зависимостью (δрн=цVпр, α ист) при ручном, автоматическом и директорном управлении самолетом с учетом и без учета подвесок для всех конфигураций самолета;
отключение ограничения nу доп с пультов КСУ;
автоматическое отклонение носков крыла в зависимости от текущего угла атаки в соответствии с заданным законом (δнк=α, М, δзк) обеспечен ручной (кнопками “носки крыла: выпуск, уборка”) выбор режима управления носками; в режиме работы “выпуск” обеспечивается установка носков в заданное фиксированное положение; при выключенных режимах “выпуск”, “уборка” в обеих кабинах реализуется режим “автомат”; КСУ формирует контролируемые разовые команды, реализующие трехпозиционный релейный закон управления, обеспечивает контроль положения носков, в качестве приводов используется комплект гидрокранов и гидроцилиндров;
автоматическую балансировку самолета по тангажу и крену при уборке - выпуске носков крыла, тормозного щитка, закрылков после схода подвесок;
управление закрылками автоматическое и по командам экипажа и контроль управления закрылками;
управление тормозным щитком по командам экипажа и автоматическое управление по командам ограничения приборной скорости;
сигнализацию попадания в штопор и автоматический вывод из штопора -прямого (плоского и крутого) и обратного, обеспечивается возможность обучения и тренировки ручному выводу из штопора, реализуется после проведения испытаний самолета на штопорные характеристики и вывод из штопора;
репрограммирование характеристик устойчивости и управляемости самолета с целью имитации характеристик боевых самолетов и повышения эффективности обучения курсантов. КСУ обеспечивает заданные приоритеты управления закрылками, разгрузкой РУС и педалей (для “электронных” триммеров), выбора режима управления носками между кабинами инструктора и курсанта.
КСУ совместно с комплексом бортового оборудования (КБО) обеспечивает автоматическое и директорное управление самолетом:
автоматическую стабилизацию углового положения по тангажу, крену (курсу);
автоматическую стабилизацию барометрической высоты во всем разрешенном диапазоне высот и скоростей; в диапазоне чисел М=0,95-1,05 в режиме автоматической стабилизации высоты должна обеспечиваться стабилизация нулевого значения угла наклона траектории;
автоматическую и директорную стабилизацию барометрической высоты в режимах работы “Посадка”, “Возврат”, “Маршрут”;
автоматическую стабилизацию приборной скорости (через канал стабилизатора), автоматическое управление самолетом в горизонтальной и вертикальной плоскостях в режиме “Маршрут”, автоматическое и директорное управление самолетом по сигналам от БЦВС, входящей в состав КБО, при полете по траектории выхода на эшелон, возврата и предпосадочного маневра в горизонтальной и вертикальной плоскостях с выходом в зону действия наземных посадочных средств;
режим совмещенного управления самолетом;
командное управление тягой двигателей посредством рекомендации через АРО и систему индикации требуемого режима работы двигателей в диапазоне “малый газ - максимал” с целью предотвращения выхода самолета из диапазонов безопасных скоростей полета для текущей конфигурации самолета;
автоматическое и директорное управление самолетом при заходе на посадку, режим “Посадка”;
автоматическое и директорное управление самолетом при повторном заходе на посадку (по командам и сигналам из КБО, режим “Повторный заход”);
автоматическое приведение к горизонтальному полету по команде экипажа и из автоматических режимов “Увод” и “Автоматический вывод из штопора” после их реализации;
автоматический увод от столкновения с землей и от осколков собственных боеприпасов;
автоматическую стабилизацию геометрической высоты (маловысотный полет);
автоматическое и директорное управление самолетом по сигналам от БЦВС КБО в горизонтальной и вертикальной плоскостях в режимах “Наведение”, “Атака”.
КСУ обеспечивает формирование резервированной информации о высотно-скоростных параметрах в соответствии с требованиями систем самолета, включая системы индикации и регистрации.
С этой целью в состав КСУ включены:
датчики аэродинамических параметров (ДАП-3-1 - 2 шт.);
приемники воздушных давлений (ПВД-2С - 2 шт.);
модули воздушных данных (МВД-Д1 – 2 шт.);
приемники температуры (П-104М - 2 шт.);
датчик аэродинамических углов (ДАУ-19-2);
блок контроля обогрева (БКО-2).
Данное оборудование обеспечивает формирование информации о первичных высотно-скоростных параметрах по четырем каналам:
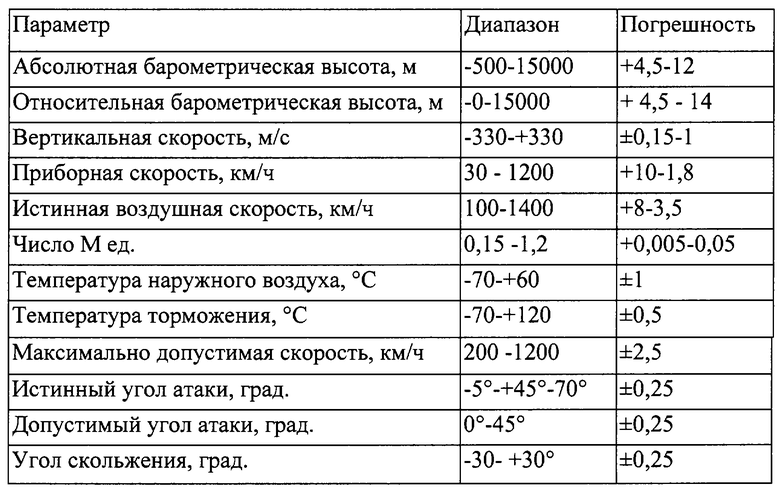
Полное давление от 9 до 2830 (±0,3...3,1) мм рт.ст.
Статическое давление от 9 до 807 (±0,3) мм рт.ст.
Температура торможения от-60 до +350 (±0,1)°С.
Местный угол скольжения от +30° до - 30° (±0,24°).
Местный угол атаки от -25° до +75°(±0,24°).
На основе данных параметров в вычислителях КСУ с учетом аэродинамических поправок вычисляются текущие значения истинной воздушной скорости (Vист), приборной скорости (Vпр), числа М, абсолютной (Набс) и относительной (Нотн) барометрической высоты, а также истинные значения углов атаки и скольжения.
Рабочие диапазоны и точностные характеристики формирования текущих и предельно-допустимых значений высотно-скоростных параметров в КСУ см. в таблице.
Кроме измерения аэродинамических углов α и β с помощью ДАУ в КСУ, предусмотрено вычисление значений этих углов и их производных с использованием всей информации, имеющейся и заложенной в КСУ. Эта информация используется в КСУ для улучшения характеристик сигналов ДАУ для контроля механических отказов ДАУ и для расширения диапазона измерения угла атаки до 70°.
Вертикальная скорость вычисляется методом комплексной обработки информации по высоте и вертикальному ускорению в соответствии со структурной схемой (фиг.4).
КСУ обеспечивает решение задач системы ограничительных сигналов и формирование:
резервированных сигналов αдоп, nудоп, Vmin, Vmax, Mmax для различных конфигураций самолета и различных вариантов подвесок с выдачей их на индикацию и регистрацию;
сигналов звуковой сигнализации и визуальную индикацию: о приближении к nу доп, при выключенном ограничителе перегрузки и в конфигурациях с отключенным либо отсутствующим ОПР; к Vmin, Vmax к опасной высоте, nу доп при ручном пилотировании в режиме “посадка”.
Существует возможность формирования резервных сигналов углов тангажа, крена, обеспечивающих безопасное пилотирование самолета при возврате на аэродром базирования после отказа источника сигналов углов и выдачу их в системы индикации и регистрации.
Система обеспечивает контроль исправности собственного оборудования, контроль входной информации от систем (по сигналам их исправности) и датчиков, включая и их обогрев, отключение отказавших оборудования, систем, датчиков, режимов управления с выдачей соответствующей информации в системы индикации, сигнализации, регистрации и АРО.
При обеспечении контроля исправности собственного оборудования в КСУ используются наиболее перспективные методологии встроенного контроля: межканальной селекции (кворумирование), “контролируемая пара” - сравнение сигналов двух одинаковых устройств, “канал - модель” - сравнение сигналов устройства и его модели, программные и аппаратные средства контроля.
Вся совокупность используемых средств встроенного контроля и управления резервированием обеспечивает нормируемые показатели надежности КСУ.
Комплексная система управления обеспечивает отклонение управляемых поверхностей самолета (по потоку) на углы:
элеронов: вверх δэл=35°, вниз δэл=30°;
стабилизатора δ=+15° - -40°;
руля направления δрн=±30°;
носков крыла δнк=0-30°;
закрылков δзакр=0 - убрано; 10-20 - взлет, 20-40 - посадка;
тормозного щитка δтщ=60°.
Допустимые ошибки управления - большее значение из ±1° или 10% от замеряемого значения, в пределах располагаемых усилий приводов.
КСУ обеспечивает всплывание и зависание элеронов в пределах заданных отклонений.
Архитектура и построение вычислительного процесса КСУ обеспечивают формирование идентичных сигналов управления с выходов резервов цифрового вычислителя на управление золотниками электрогидравлических приводов.
Построение контуров управления золотниками приводов обеспечивает синхронизацию положения независимых золотников обеих камер.
При релейном управлении носками используются четыре электрогидрокрана (2 - гидросистемы, 2 - выпущенных положения).
При выключенных режимах управления носками (носки: уборка, выпуск) в кабине инструктора, приоритет в выборе режима управления носками принадлежит кабине курсанта, иначе - кабине инструктора. Смена приоритета сигнализируется курсанту.
КСУ по командам с пультов управления КСУ формирует сигналы на выпуск (уборку) закрылков в положения: “убрано”, “посадка”, при отсутствии с пультов КСУ указанных команд закрылки выпускаются в положение “взлет” и убираются автоматически в соответствии с положением шасси [и запасом до Vmax (с выпущенными закрылками)], КСУ осуществляет контроль положения и синхронности выпуска (уборки). Конкретные значения углов отклонения закрылков в положениях “взлет”, “посадка” - оперативно сменные.
Допустимый угол рассогласования закрылков - 5°.
При превышении этого рассогласования КСУ обеспечивает снятие управляющих сигналов выпуска-уборки закрылков и отключение привода закрылков с сигнализацией об отказе (несимметричности) управления закрылками и выдачу (при необходимости) сигналов на тормоз закрылков.
Если команды положения закрылков на пульте КСУ кабины инструктора отключены, приоритет управления закрылками принадлежит кабине курсанта. При наличии одной из двух команд положения закрылков с пульта КСУ кабины инструктора приоритет управления передается этой кабине. Смена приоритета индицируется курсанту.
КСУ формирует разовые команды, реализующие релейный закон управления (уборка - выпуск) тормозным щитком, по командам экипажа из обеих кабин или по сигналу ограничения Vпр.
В качестве привода используется гидроцилиндр и гидрокран.
При отсутствии с органов управления разгрузкой РУС и педалей кабины инструктора команд управления КСУ обеспечивает приоритет управления разгрузкой из кабины курсанта, в противном случае - из кабины инструктора.
КСУ выдает информацию об углах отклонения (положении) управляемых поверхностей в систему индикации самолета.
В режиме работы “репрограммирование” КСУ обеспечивает изменение градиентов управления путем изменения зависимостей по сигналам с резервированного трехпозиционного переключателя, устанавливаемого в отсеке КСУ или в кабине инструктора и защищенного от случайного переключения. Включение и выключение режима осуществляется с МФПУ КБО.
В случае отказа трех приемников полного или статического давления КСУ переходит на внутренние сигналы коррекции. При этом допускается ограничение условий эксплуатации. КСУ обеспечивает ручной переход на резервную версию СПО. Переход обеспечивается с ПУЛ КСУ органами управления, защищенными от случайного включения.
КСУ обеспечивает автоматический переход на требуемые алгоритмы управления при появлении команды “Штопор” (реализуется при внедрении режима автоматический вывод из штопора).
Предусмотрен автоматический переход КСУ на резервную версию СПО после обнаружения отказа управляющей версии СПО.
Для обеспечения адаптивности КСУ к характеристикам семейства легких самолетов законы управления обеспечивают:
повышение адаптивных возможностей законов управления с целью обеспечения требуемых характеристик устойчивости и управляемости в конфигурациях самолета, связанных с применением внешних подвесок, включая асимметричные варианты, в расширенных диапазонах изменения веса, центровки, перегрузок и скоростей;
снижение загрузки пилота при действии асимметричных моментов крена и/или рысканья, появление и нестабильность (от самолета к самолету) которых вероятны на углах атаки, больших 15°, при полете в условиях частичного или полного срыва обтекания крыла;
необходимость существенного улучшения координации движений крена и рысканья с целью удержания угла скольжения в области, в которой возможно обеспечение приемлемых характеристик устойчивости и управляемости, при управлении как от РУС крена, так и от педалей.
Основные особенности законов управления продольного канала КСУ:
использование обратных связей по угловым скоростям тангажа ωу, угла атаки α, сигнала угла атаки α и сигнала нормальной перегрузки nу;
введение в число сигналов для автоматического безударного переключения режимов работы “Взлет - Посадка” и “Полет”, кроме сигналов положения закрылков разовых команд “шасси убрано” (выпущено);
введение в структуру СДУ сигналов для автоматической перебалансировки самолета при переходе из полетной конфигурации во взлетно-посадочную и обратно при управлении носками и тормозным щитком;
введение в структуру СДУ нелинейного префильтра, ограничивающего величину скорости нарастания управляющего сигнала при перемещении ручки управления;
переход в полетной конфигурации самолета на интегральный закон управления, применявшийся только для ограничения αдоп, nудоп.
Основные особенности законов управления боковых каналов КСУ:
использование в качестве сигналов обратных связей для обеспечения устойчивости, приемлемой динамики и управляемости самолета с СДУ угловых скоростей крена, угла скольжения и скорости изменения угла скольжения;
предусмотрена перекрестная связь с ручки управления в канал направления для обеспечения потребных скоростей вращения по крену на больших углах атаки и “грубой” координации движений крена и рыскания;
для улучшения координации предусмотрено использование сигнала скорости изменения угла скольжения β;
предусмотрено ограничение отклонения руля направления из условий прочности конструкции, но с возможностью максимального использования отклонения руля на больших углах атаки.
Для снижения трудоемкости пилотирования при парировании внешних моментов крена или рысканья и для улучшения координации движений крена и рысканья предусмотрено использование интегральных законов управления как в канале элеронов, так и в канале направления.
Ограничение угла атаки производится в соответствии с величиной αдоп, вырабатываемой КСУ для всех конфигураций самолета.
Значение αдоп и nудоп соответствуют максимальному отклонению РУС тангажа.
Электропитание КСУ осуществляется от двух независимых шин, при этом обеспечивается отсутствие перерыва в электропитании КСУ.
Электропитание КСУ производится от системы электроснабжения, состоящей из двух независимых каналов (бортов) переменного тока с номинальным напряжением ~ 115/200 В, номинальной частотой 400 Гц и из двух независимых вторичных шин, работающих от выпрямительных устройств постоянного тока номинальным напряжением +27 В. Качество электроэнергии соответствует ГОСТ 19705-89.
Электропитание КСУ осуществляется по цепям:
переменного тока - обогрев ДАЛ, ДАУ и ПВД;
постоянного тока - питание блоков питания вычислительной части системы.
При падении напряжения питания постоянного тока ниже +16V блоки питания КСУ отключаются. Восстановление напряжения выше +16V эквивалентно подаче питания.
При запуске ВСУ шины постоянного тока разъединяются. Одновременный перерыв и одновременные просадки напряжения по двум шинам исключены.
КСУ по постоянному току является потребителем 1 категории, а по переменному току: обогрев ДАЛ, ДАУ, ПВД и питание вентиляторов (при необходимости) - потребителем 2 категории.
Электрическая мощность, потребляемая КСУ, не более:
переменного тока - 1400 В·А;
постоянного тока - 900 Вт.
Время готовности КСУ после подачи питания - не более 3-х минут с учетом времени проведения наземного контроля. Предусмотрено прерывание и блокирование наземного контроля с пультов КБО.
Исполнительными приводами КСУ являются электрогидравлические рулевые приводы (РПД-15А) (в канале крена и направления) (РПД-17А) (в канале тангажа).
Электрогидравлические приводы питаются от двух независимых гидросистем. Работа приводов (РПД-15В) с усилиями обеспечивается при наличии рабочего давления в обеих гидросистемах. При отсутствии давления в одной из гидросистем управление рулевыми поверхностями обеспечивается от другой гидросистемы, при этом усилие, развиваемое приводами, уменьшается примерно в два раза. В канале тангажа при этом обеспечиваются потребные усилия.
Система управления закрылками обеспечивает их перемещение и фиксацию в выпущенном и убранном положении. Система управления питается от общей гидросистемы.
Управление выпуском и уборкой закрылков осуществляется с пультов управления и от вычислителя КСУ, сигнал которого поступает на рулевой привод закрылков; через гибкие валы вращательное движение передается на роторные редукторы, которые непосредственно управляют закрылками. Каждый из закрылков связан с двумя роторными редукторами.
На каждом закрылке установлены резервированные датчики положения, сигналы с которых поступают в вычислители КСУ. При достижении закрылками заданного положения сигнал управления снимается. В заданном положении закрылок удерживается за счет самоторможения роторных редукторов и тормозом.
Угол отклонения закрылков во взлетное положение составляет - 10-20°.
Угол отклонения закрылков в посадочное положение - 20-40°.
Положение закрылков контролируется автоматически и по мнемокадру на МФЦИ экипажем.
КСУ осуществляет контроль синхронности выпуска-уборки закрылков. При угле рассогласования закрылков более 3-5° КСУ снимает управляющий сигнал, закрылки останавливаются, экипажу выдается сообщение на МФЦИ “закрылки - отказ”.
КСУ реализует режим управления закрылков “автомат”. На взлете после уборки шасси система начинает уборку закрылков, на посадке после выпуска шасси осуществляет выпуск закрылков во взлетное положение.
Направление вращения вала - реверсивное в зависимости от подачи электрического сигнала на электромагнитные краны. Время срабатывания привода от момента включения (отключения) электромагнитного крана и клапана включения до начала вращения (остановки) вала привода - не более 0,15 с.
КСУ осуществляет управление носками крыла автоматически в зависимости от текущего угла атаки. Угол отклонения носков 25° и 30°. При выпущенных закрылках δзк>2° носки автоматически отклоняются на угол 25°.
На каждой консоли крыла имеется по две секции носков: корневые и концевые. Каждая секция управляется от бустерной и общей гидросистемы. В заданном положении носки крыла удерживаются давлением рабочей жидкости. Для обеспечения контроля управления и компенсации несимметрии управления носками крыла на каждой секции установлены резервированные датчики положения, сигналы с которых поступают в вычислители КСУ. В случае отказа управления хотя бы одной из секций по любой причине система формирует сигнал отказа.
КСУ взаимодействует со следующим оборудованием:
1. Системы, входящие в комплекс бортового оборудования самолета:
бортовая цифровая вычислительная система БЦВС;
комплексная система электронной индикации и управления КСЭИУ;
бесплатформенная инерциальная навигационная система БИНС;
радиовысотомер малых высот (типа РВМ-95);
радиотехническая система ближней навигации и посадки (VIM-95, DME);
спутниковая навигационная система (А-737-003);
система управления оружием (СУО).
2. Самолетное оборудование:
гидросистема самолета, включающая датчики команд о наличии давления;
система электроснабжения самолета;
бортовое устройство регистрации (“Карат”, ЗБН, ЭБН);
система бортовых измерений (“Регата”);
дистанционная система управления двигателями;
система управления общесамолетным оборудованием, включающая датчики состояния шасси: “стойка левая обжата” - одноканальный, питание от левого борта, “стойка правая обжата” - одноканальный, питание от правого борта, “шасси убрано” - четырехканальный, питание от четырех резервов КСУ по передней стойке шасси, команда “уборка (выпуск) шасси выпущены” (одноканальные);
аппаратура самолетного переговорного устройства (МСПУ);
гидрокраны управления носками крыла, тормозным щитком;
кнопки отключения автоматического управления и приведения к горизонту на РУС;
механизм разгрузки ручки в канале тангажа (типа МП-10) и органы управления разгрузкой РУС и педалей;
переключатели выбора режима управления носками (в двух кабинах);
переключатели включения режимов “Увод”;
переключатель вариантов режима “Репрограммирование”.
3. Обмен информацией между взаимодействующим оборудованием и КСУ осуществляется в соответствии с ГОСТ 26765.52-87. При этом оконечные устройства ОУ для связи с МКИО входят в состав КСУ.
В КСУ входят два идентичных пульта КСУ (первой и второй кабины).
На лицевой панели пульта расположены кнопки включения (отключения) режимов работы КСУ:
АП - автоматическая стабилизация углового положения самолета или автоматическое управление в режиме траекторного управления (совместно с режимом траекторного управления);
ВЫС - автоматическая стабилизация барометрической высоты;
СКОР - автоматическая стабилизация приборной скорости (через канал стабилизатора);
ТРКТ. УПР. - режим траекторного управления (директорное управление);
ЗАКР. УБР. - команда на уборку закрылков;
ЗАКР. ПОС. - команда на выпуск закрылков в посадочное положение;
ОПР. ОТКЛ. - отключение режима автоматического ограничения перегрузки;
АВШ. ОТКЛ.- отключение режима автоматического вывода из штопора;
АВТ. УВОД ОТКЛ. - отключение режимов автоматического увода КСУ;
РЕЗЕРВ. РЕЖИМ - переключение КСУ на законы управления, реализованные в резервной версии программного обеспечения;
НОСКИ ВЫП.- выпуск носков в фиксированное (25°) положение;
НОСКИ УБР. - уборка носков. Последние шесть кнопок закрываются прозрачной откидывающейся крышкой с двумя фиксированными положениями.
Связь пультов КСУ с ЦВС КСУ осуществляется по цифровой линии связи. Отказы элементов пульта и линии связи контролируются и индицируются экипажу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
| САМОЛЕТ С СИСТЕМОЙ ФОРМИРОВАНИЯ РЕЗЕРВНОЙ ИНФОРМАЦИИ О ПРОСТРАНСТВЕННОМ ПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2324624C1 |
| МНОГОПОЗИЦИОННЫЙ ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА С ПОВЫШЕННЫМИ МАНЕВРЕННЫМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2252900C1 |
| КОМПЛЕКС БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ ЛЕГКОГО МНОГОЦЕЛЕВОГО САМОЛЕТА | 2002 |
|
RU2215668C1 |
| САМОЛЕТ С СИСТЕМОЙ УПРАВЛЕНИЯ ОБЩЕСАМОЛЕТНЫМ ОБОРУДОВАНИЕМ | 2004 |
|
RU2263044C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ С МУЛЬТИПЛЕКСНОЙ СИСТЕМОЙ ИНФОРМАЦИОННОГО ОБМЕНА | 2001 |
|
RU2174485C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ С ПОВЫШЕННЫМИ МАНЕВРЕННЫМИ ВОЗМОЖНОСТЯМИ | 2004 |
|
RU2252899C1 |

Изобретение относится к самолетам, оборудованным процессорными управляющими комплектами, обеспечивающими приведение в действие органов управления самолетом, изменяющих или поддерживающих его положение во время полета. Система управления самолета содержит комплексную систему управления, посты управления первой и второй кабины, механически связанные между собой, механизмы триммерного эффекта по каналам тангажа, крена и направления, пульты управления КСУ, гибкие валы управления закрылками, планетарные редукторы-шарниры выпуска-уборки закрылков, систему управления тормозным щитком. Комплексная система управления состоит из четырехкратно резервированной цифровой вычислительной части, четырехкратно резервированных по электрической части и двукратно по гидравлической части электрогидравлических рулевых приводов четырехкратно резервированного по электрической части и двукратно по гидравлической части электрогидравлического рулевого привода стабилизатора, вращательного электрогидравлического привода закрылков, трехпозиционных гидравлических цилиндров привода носков крыла, электрогидравлических кранов управления отклоняемыми носками крыла, привода тормозного щитка. Каждый канал вычислительной части комплексной системы управления выполнен с возможностью расчетного определения сигналов управления по структуре “канал-модель”. Данная система управления самолетом характеризуется расширенными функциональными возможностями. 7 з.п.ф-лы, 4 ил., 1 табл.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5979835 A, 09.11.1999 | |||
| Устройство для формирования топа к табакорезальным станкам | 1979 |
|
SU867362A1 |
| БОРТОВАЯ СИСТЕМА РЕГИСТРАЦИИ ПОЛЕТНЫХ ДАННЫХ | 1992 |
|
RU2101755C1 |

