оо
СП
Изобретение относится к измерительной технике, а именно к приспособлениям к измерительным устройст- ваме и может быть использовано для автоматической поверки стрелочных приборов с круговой шкалой (например, манометров),
Цель изобретения - сокращение времени поверки за счет повышения на- дежности центрирования поверочной установки.
На фиг.1 изображена блок-схема . предлагаемого устройства; на фиг,2 - кинематическая схема планетарного редуктора; на фиг.З - траектория движения выходной оси редуктора} на фиг.А - один из вариантов выполнения вычислительного устройства.
Устройство состоит из специально- го планетарного редуктора 1, приводимого во вращение двигатепем 2 центрирования, вычислительного устройства 3, датчика 4 положения .отметок и датчика 5 положения стрелки, кине- матически связанных механизмом 6 сканирования ; датчики 4 и,5 и механизм 6 сканирования расположены на поверочной установке 7, причем датчики 4 и 5 расположены на переднем торце по- вероч ной установки.
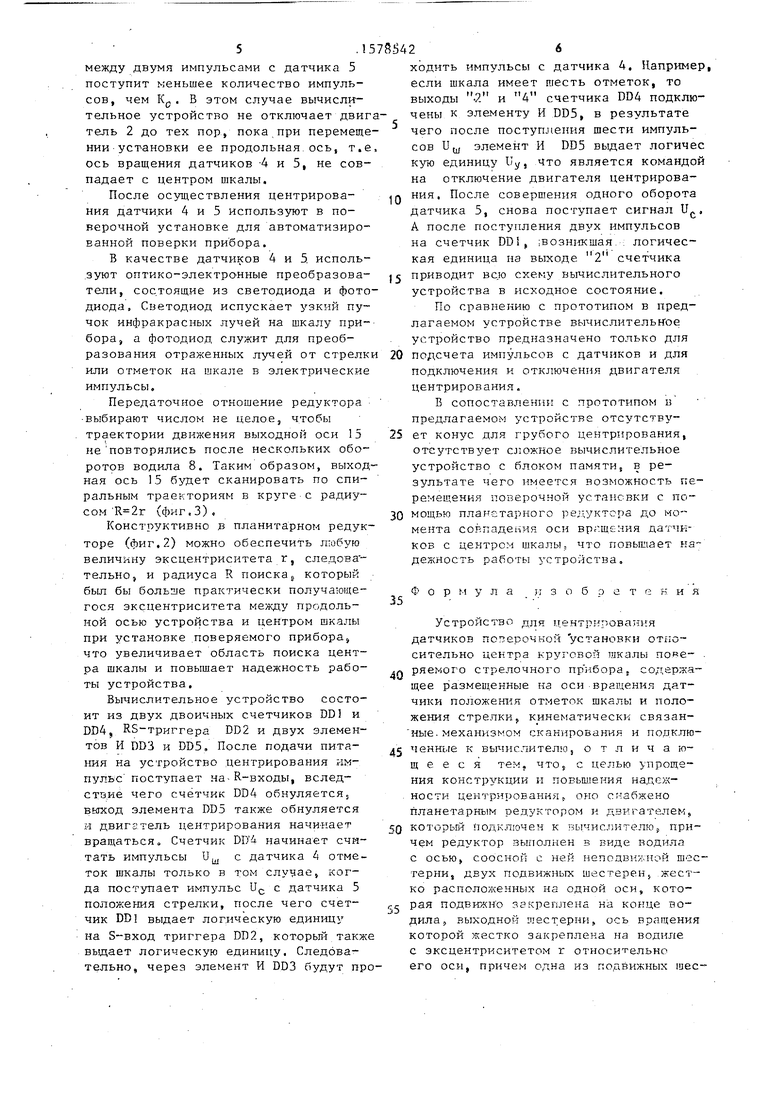
Планетарный редуктор состоит из водила 8, приводимого во вращение двига Ttлен 2 центрирования, и четырех шестерен 9-12. Шестерня 1 0 кинематически связана с неподвижной шестерней 9, которая расположена соосно с водилом 8. С шестерней 10 жестко соединена шестерня 11, которые имеют общую ось 13 вращения5 расположенную на водшге 30 С шестерней 11 кинематически связана шестерня 12, ось 14 вращения которой расположена на водиле 8 на расстоянии эксцентриситета г от оси вращения водила На выходной шестерне 12 расположена выходная ось 15 редуктора которая смещена относительно оси вращения выходной шестерни 12 на расстояние эксцентриситета г„ На выходной оси 15 подвешена поверочная уста- нозка 7 так, что ось 15 может проворачиваться в месте крепления оси, а центр тяжести поверочной установки 7 находится всегда ниже оси 15,
Устройство работает следующим образом
Центрирование поверочной установки относительно центра шкалы прибора осуществляют следующим образом. По
j
0 5
Q п
5
5
веряемый прибор располагают в непосредственной близости от датчиков 4 и 5 так, чтобы был по возможности минимальный эксцентриситет между осью вращения датчиков и центром шкалы. Этот эксцентриситет не должен превышать величины Rf иначе не произойдет центрирования. Затем подают питание на устройство центрирования, после чего механизм 6 сканирования приводит в круговое вращение датчики 4 и 5. Датчики 4 и 5 вращаются в плоскости, параллельной шкале, т.е. в непосредственной близости от защитного стекла прибора, и выдают сигнал в виде кратковременного импульса только в случае пересечения ими стрелки или отметки шкалы прибора. Одновременно с подачей питания начинает вращаться двигатель 2 центрирования и приводить во вращение выходную шестерню 12,
Выходная ось 15, вращаясь вокруг оси 14 вращения, которая вращается вокруг оси вращения водила 8, будет перемещаться по осесимметричной спиральной траектории (на фиг.З изображен вид траектории движения выходной оси 15 со стрроны выходной оси 15 при передаточном отношении шестерен 9-12, равном чуть больше четырех), Скорость вращения двигателя 2 центрирования рассчитана такой, что скорость движения выходной оси 15 гораздо меньше скорости перемещения датчиков 4 и 5, По такой же спиральной траектории выходная ось 15 редуктора 1 будет перемещать ось вращения датчиков 4 и 5 поверочной установки.
Предположим, что продольная ось установки, т„е. ось вращения датчиков 4 и 5 совпадает с центром шкалы В этом случае траектория движения датчика 4 проходит по всем отметкам шкалы в непосредственной близости от края шкалы. Датчик 5 вырабатывает импульсы через один оборот, а за один оборот датчик 4 в-ырабйтывает количество импульсов, равное числу К0 отметок на шкале.,Таким образом, в вычислительное устройство 3 между двумя импульсами с датчика 5 всегда поступает К0 импульсов с датчика 4 и вычислительное устройство 3 отключает двигатель 2„
При несовпадении оси вращения датчиков 4 и 5 с центром шкалы траектория движения датчика 4 не сможет пересечь все отметки шкалы, в результате чего в вычислительное устройство
между двумя импульсами с датчика 5 поступит меньшее количество импульсов, чем . В этом случае вычислительное устройство не отключает двигатель 2 до тех пор, пока при перемещении установки ее продольная ось, т.е. ось вращения датчиков 4 и 5, не совпадает с центром шкалы.
После осуществления центрирования датчики 4 и 5 используют в поверочной установке для автоматизированной поверки прибора.
В качестве датчиков 4 и 5 используют оптико-электронные преобразователи, состоящие из светодиода и фотодиода, Светодиод испускает узкий пучок инфракрасных лучей на шкалу прибора, а фотодиод служит для преобразования отраженных лучей от стрелки или отметок на шкале в электрические импульсы.
Передаточное отношение редуктора выбирают числом не целое, чтобы траектории движения выходной оси 15 не повторялись после нескольких оборотов водила 8. Таким образом, выходная ось 15 будет сканировать по спиральным траекториям в круге с радиусом (фиг.З),
Конструктивно в планитарном редукторе (фиг, 2) можно обеспечить л:обую
тельно, и радиуса R поиска, который был бы больше практически получающегося эксцентриситета между продольной осью устройства и центром шкалы при установке поверяемого прибора, что увеличивает область поиска центра шкалы и повышает надежность работы устройства.
Вычислительное устройство состоит из двух двоичных счетчиков DD3 и DD4, RS-триггера DD2 и двух элементов И DD3 и DD5, После подачи питания на устройство центрирования импульс поступает на R-входы, вследствие чего счетчик DD4 обнуляется, выход элемента DD5 также обнуляется л двигатель центрирования начинает вращаться Счетчик DD i начинает считать импульсы иш с датчика 4 отметок шкалы только в том случае, когда поступает импульс Uc с датчика 5 положения стрелки, после чего счетчик DD выдает логическую единицу на S-вход триггера DD2, который такж выдает логическую единицу. Следовательно, через элемент И DD3 будут прходить импульсы с датчика 4. Например, если шкала имеет шесть отметок, то выходы . и 4 счетчика DD4 подключены к элементу И DD5, в результате
чего после поступления шести импульсов иш элемент И DD5 выдает логичес кую единицу Uy, что является командой на отключение двигателя центрировая ния. После совершения одного оборота датчика 5, снова поступает сигнал Uc, А после поступления двух импульсов на счетчик DD1, возникшая логическая единица на выходе 2 счетчика
приводит всю схему вычислительного устройства в исходное состояние,
По сравнению с прототипом в предлагаемом устройстве вычислительное устройство предназначено только для
0 подсчета импульсов с датчиков и для подключения и отключения двигателя центрирования.
В сопоставлении с прототипом в предлагаемом устройстве отсутству5 ет конус для грубого центрирования, отсутствует сложное вычислительное устройство с блоком памяти, в результате чего имеется возможность перемещения поверочной установки с по0 мощью планетарного редуктора до момента сояпадепчч оси ния датчиков с центром шкалы, что повышает надежность работы устройства.
35
Форм
л а
з о б э с т с я и я
Устройство для печтриповання датчиков ПОТСРОЧЧОЙ установки относительно центра ьругсвой шкалы по«еряемого стрелочного прибора, содержащее размещенные на оси вращения датчики положения отметок шкалы и положения стрелки, кинематически связанные механизмом сканирования и подкпюченные к вычислителюs отличающееся тем, ч то 5 с целью упрощения конструкции и повышения надежности центрирования, оно снабжено планетарным редуктором и двигаталек,
который подключен к ычис-т., причем редуктор выполнен в риде водила с осью, соосноп с ней наподвн/ной шос- герни8 двух подвижных , жестко расположенных на одной оси, которая подвижно закреплена на конце водила, выходной шестерни, ось вращения которой чсестко закреплена на водиле с эксцентриситетом г относительно его оси, причем одна из подвижных шее-
терен сцеплена с неподвижной тестер- тельно ее оси вращения размещена ось ней, а вторая - с выходной шестерней, вращения датчиков, при этом водило ре- на которой с эксцентриситетом г относи- дуктора соединено с двигателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ СУШКИ ЗЕРНА | 2008 |
|
RU2395048C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВЛАЖНОСТИ СЫПУЧИХ МАТЕРИАЛОВ | 2008 |
|
RU2394232C2 |
| Ткацкий станок | 1989 |
|
SU1622449A1 |
| ПАССИВНЫЙ ПРИЕМОПЕРЕДАТЧИК | 1999 |
|
RU2178897C2 |
| ГЕНЕРАТОР СЛУЧАЙНЫХ СИГНАЛОВ | 1991 |
|
RU2037950C1 |
| ДАТЧИК ВЕСА | 2003 |
|
RU2257551C2 |
| Устройство контроля частоты вращения | 1985 |
|
SU1303941A1 |
| ДАТЧИК РАСХОДА | 2003 |
|
RU2262080C2 |
| Устройство для поверки стрелочных приборов с круговой шкалой | 1983 |
|
SU1174740A1 |
| СПОСОБ ДОПУСКОВОГО КОНТРОЛЯ МАГНИТОЭЛЕКТРИЧЕСКОГО ИЗМЕРИТЕЛЯ ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174236C1 |
Изобретение относится к измерительной технике. Цель изобретения - упрощение конструкции и повышение надежности центрирования. Устройство содержит планетарный редуктор 1, приводимый во вращение двигателем 2, вычислитель 3, датчик 4 положения отметок шкалы и датчик 5 положения стрелки, кинематически связанные механизмом 6 сканирования. При этом датчики 4, 5 и механизм 6 размещены на поверочной установке 7, которая подвешена на подвижной выходной оси редуктора 1. Вначале осуществляется центрирование поверочной установки 7 относительно центра шкалы прибора. Для этого механизм сканирования приводит в круговое вращение датчики 4 и 5, которые выдают импульс при пересечении ими стрелки или отметки шкалы. Одновременно приводится во вращение редуктор 1, выходная ось которого с поверочной установкой 7 перемещается по осесимметричной спиральной траектории. Вычислитель 3 отключает двигатель 2 при совпадении продольной оси поверочной установки 7 с центром шкалы. 4 ил.
Фиг.1
Фиг.З
т|
| Приспособление для установки следящей системы относительно шкалы стрелочного прибора | 1970 |
|
SU586328A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ изготовления экрана для проекции | 1928 |
|
SU11747A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
