Изобретение относится к промысловой геофизике и предназначено для определения угла наклона искривленной скважины.
Цель изобретения - повышение точности измерения угла наклона за счет уменьшения погрешности от нелинейности преобразования.
На чертеже приведена структурная схема феррозондового преобразователя угла наклона скважины.
Феррозондовый преобразователь содержит корпус 1 и установленные в нем наружную 2 и внутреннюю 3 рамки, составляющие кардакный подвес. На рамках 2 и 3 закреплены маятники 4 и 5, На внутренней рамке 3 в ее плоскости и перпендикулярно ее оси вращения размещен феррозонд 6. В корпусе 1 в его пазах (не показаны) жестко закреплены две взаимно перпендикулярные основные катушки 7 и 8 индутивности, магнитные оси которых расположены под углом 45° относительно оси-чувствительности феррозонда 6. Кроме того, в корпусе 1 также в пазах жестко закреплены две взаимно перпендикулярные дополнительные катушки 9 и 10 индуктивности, магнитные оси которых расположены под угло 45е относительно магнитных осей основных катушек 7 и 8 и размещены с , ними в одной плоскости. Таким образом, магнитные оси катушек 7-10 расположены под углом 45 по отношению одна к другой, а магнитная ось одной из этих катушек всегда совпадает с осью чувствительности феррозонда 6
5
0
5
0
5
0
5
при наклонах на угол, равный К т,
где К 0, 1, 2, 3 - номер катушки.
Обмотка возбуждения феррозонда 6 подключена к выходу первого усилителя 11 мощности, вход которого соединен через полосовой фильтр 12 с первым выходом делителя 13 частоты. Вход последнего подключен к выходу генератора 14. Сигнальная обмотка феррозонда 6 подключена через полосовой фильтр 15, первый фазовый детектор 16, первьй интегратор 17, разделительный конденсатор 38, второй фазовый детектор 19, второй интегратор 20, компаратор 21, аналого-цифровой преобразователь (АЦП) 22 к входу светодиодных индикаторов 23, кроме этого, выход второго интегратора 20 непосредственно соединен с входом АЦП 22. Второй выход делителя частоты 1 3 подключен к тактирующему входу первого фазового детектора 16. Третий выход делителя 13 частоты подключен к тактирующему входу второго фазового детектора 19 и к входу второго усилителя 24 мощности, а четвертый выход подключен к управляющим входам коммутатора 25. Выход второго усилителя 24 мощности подключен чет рез коммутатор 25 к катушкам индуктивности 7-10 и к входу блока 26 индикации сектора измерений.
Преобразователь работает следующим
образом. 1
В наклонной скважине под действием маятника 4 наружная рамка 2, поворачиваясь, устанавливает ось вращения внутренней рамки 3 перпендикулярно плоскости наклона скважины. При этом ппоскость внутренней рам- ки 3, на которой закреплен феррозонд 6, с помощью маятника 5 сохраняет горизонтальное положение. Основные 7 и 8 и дополнительные 9 и 10 катушки индуктивности жестко закрепленные с корпусом 1, изменяют свое положение относительно оси чувствительности феррозонда 6 пропорционально синусу угла наклона скважины.
С выхода делителя 13 частоты через второй усилитель 24 мощности низкочастотный ток с частотой f поочередно подается в катушки 7-10 индуктивности, в которых создается переменное магнитное поле, проекция вектора которого на ось чувствительности феррозонда 6 пропорциональна синусу угла наклона скважины.
Высокочастотное напряжение с генератора 14 через делитель 13 частоты, полосовой фильтр 12, первый усилитель 11 мощности питает феррозонд с
частотой f
В
Выделение второй
гармоники выходного сигнала осуществляется полосовым фильтром 15. Детектирование осуществляется первым фазовым детектором 16 тактируемой частотой 2fB. Пульсирующее модулированной частотой fH напряжение сглаживается первым интегратором 17. Постоянная времени последнего выбирается такой, что происходит сглаживание высокочастотного напряжения второй гармоники, но в то же время не подавляется низкочастотное напряжение с частотой fH, Затем пульсирующее напряжение с выхода первого интегратора 17 подается через разделительный кондеи - сатор 18, второй фазовый детектор 19, тактируемый низкочастотным напряжени-г ем, на второй интегратор 20, на выхогу де которого устанавливается постоянное напряжение
Uk K-H-sinCQ kp) } (1)
где К - константа преобразования, зависящая от конструкции датчика, параметров тракта преобразования сигнала, числа витков катушек;
Н -напряженность магнитного поля, создаваемого катушкой;
Г
б - угол наклона; k - номер катушки индуктивности; р - угол между катушками индуктивности.
Рассмотрим такое соотношение Q и при котором выполняется условие
0 - k р ё Ы.
Выберем значение х таким, чтобы
выполнялось соотношение:
sin х л х.
В этом случае,выражение (1) можно переписать как
U
k
К
Н-/6- kp/. (2)
Как видно из выражения (2), выходное напряжение прямо пропорционально измеряемому углу 9
в - Р
Выходной сигнал U . далее подается через АЦП 22 на вход индикаторов 23 и на вход компаратора 21, имеющего
опорные напряжения -Uоп и +U
oft
Эти
напряжения равны по величине напряжению, снимаемому с выхода второго интегратора 20 при отклонении вектора напряженности магнитного поля k-й катушки индуктивности от оси чувствительности феррозонда соответственно на углы -р/2 и р /2,
Если выходное напряжение лежит в пределах -Uon U ё -t U on, то включается компаратор 21, выход которого разрешает работу АЦП 22.
В рассматриваемом случае имеют четыре катушки индуктивности, следовательно, угол р определяется из соотношения
л 360° /
Р -z 45 I 2п )
где п - количество катушек индуктивности.
Погрешность измерения, обусловленная аппроксимацией функции sinp/2 прямой линией, равна
А& р/2 - sin р/2 7/8 - - sin 7/8 % 34 23.
Задаваясь погрешностью дб , можно определить необходимое количество катушек индуктивности.
Блок 26 индикации сектора измерений представляют собой п светодиодов и особенностей не имеет.
Индикатор 23 представляет собой блок семисегментных светодиодных матриц.АЦПс22 может быть выполнен на микросхеме К572ПВ2.
Предлагаемый преобразователь обладает по сравнению с известным повышенной точностью измерения за счет устранения зоны нечувствительности1 простотой конструкции, за счет исключения вычислительного устройства. При увеличении числа дополнительных катушек до четырех или шести , что не представляет больших трудностей, погрешность от.-нелинейности аппроксимации может быть уменьшена до 10 - 4. Введенные дополнительные элементы являются стандартными и незначительно усложняют схему преобразования и при этом позволяют исключить вычислительное устройство, выполняю0
5
0
5
щее алгоритм определения арктангенса от результата операции деления одного сигнала на другой.
Формула изобретения
Феррозондовый преобразователь угла наклона скважины, содержащий корпус и установленные в нем наружную и внутреннюю рамки, феррозонд, размещенный на внутренней рамке, две жест ко закрепленные в корпусе взаимно перпендикулярные основные катушки индуктивности, магнитные оси которых расположены под углом 45° относительно оси чувствительности феррозонда, отличающийся тем, что, с целью повышения точности измерения угла наклона за счет уменьшения погрешности от нелинейности преобразования, он снабжен жестко закрепленными в корпусе двумя дополнительными взаимно перпендикулярными катушками индуктивности, магнитные оси которых расположены под углом 45 относительно магнитных осей основных катушек и размещены с ними в одной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Феррозондовый преобразователь угла наклона скважины | 1984 |
|
SU1199917A1 |
| Феррозондовый датчик азимута | 1982 |
|
SU1025877A1 |
| Феррозондовый датчик азимута | 1980 |
|
SU964119A2 |
| Феррозондовый датчик азимута | 1979 |
|
SU802535A1 |
| ПРЕОБРАЗОВАТЕЛЬ АЗИМУТА ДЛЯ ИНКЛИНОМЕТРА | 1990 |
|
RU2018645C1 |
| Азимутальный датчик инклинометра | 1984 |
|
SU1257178A2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КАРОТАЖА СКВАЖИН | 2004 |
|
RU2292064C2 |
| Преобразователь азимута инклинометра | 1990 |
|
SU1760324A1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР И СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ПРИ ПОМОЩИ ВЕКТОРНОЙ КОМПЕНСАЦИИ | 2013 |
|
RU2539726C1 |
| Устройство для измерения нестабильности частоты вращения вала | 1984 |
|
SU1210100A1 |
Изобретение относится к промысловой геофизике и позволяет повысить точность определения угла наклона скважины за счет уменьшения погрешности от нелинейности преобразования. Сущность: преобразователь снабжен жестко закрепленными в корпусе двумя дополнительными взаимно перпендикулярными катушками индуктивности, магнитные оси которых расположены под углом 45° относительно магнитных осей основных катушек и размещены с ними в одной плоскости. 1 ил.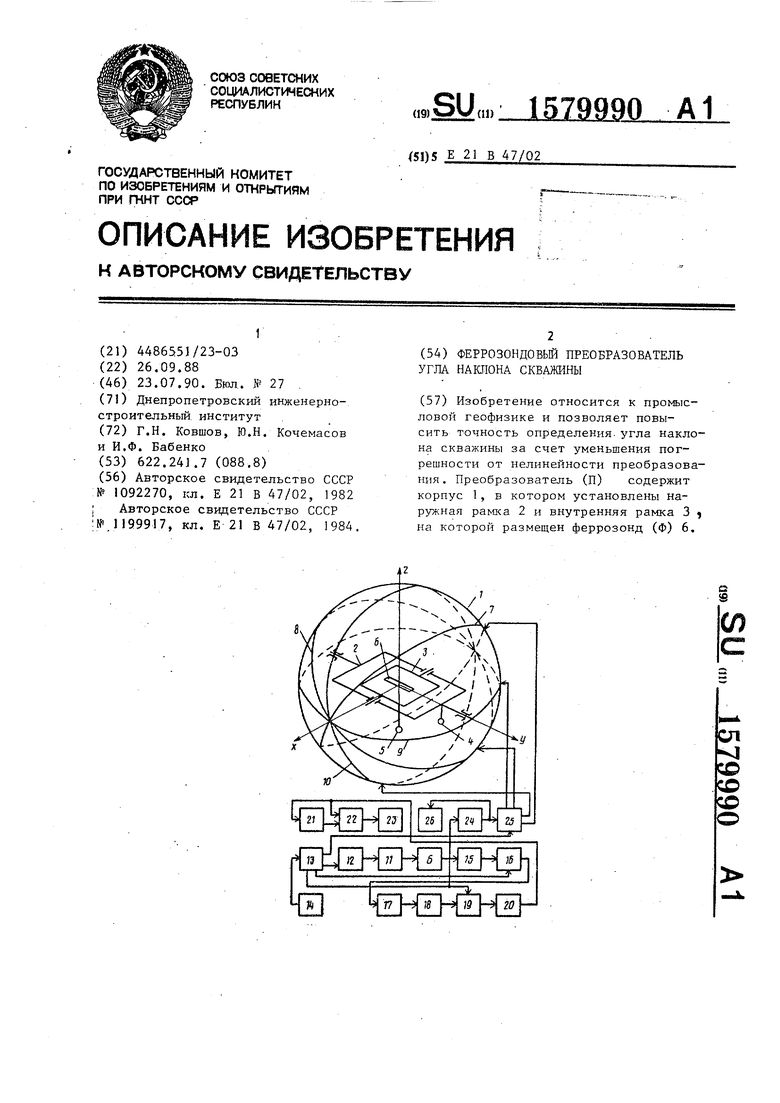
| Датчик угла отклонения от вертикали | 1982 |
|
SU1092270A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
