Изобретение относится к магнитометрии и, прежде всего, к точным измерениям компонент индукции магнитного поля феррозондовым трехкомпонентным магнитометром при помощи векторной компенсации индукции магнитного поля.
Известен феррозондовый магнитометр [1], содержащий три однокомпонентных чувствительных элемента, магнитные оси которых взаимно ортогональны, последовательно соединенные усилитель переменного тока, фазочувствительный выпрямитель, регистрирующий прибор, блок обратной связи, а также генератор, коммутатор, фазовращатель и устройство формирования импульсов.
Недостатком этого феррозондового магнитометра является невозможность одновременного измерения трех компонент магнитного поля, невысокое быстродействие схемы и сложность настройки схемы, которая обусловлена технологическим разбросом индуктивностей при изготовлении трех однокомпонентных чувствительных элементов и, следовательно, требуемым фазовым сдвигом при измерениях по разным компонентам на одном выходном каскаде. При обрыве цепи любой одной из последовательно соединенных обмоток теряется информация по всем трем компонентам. Также недостатком этого феррозондового магнитометра является отсутствие совмещенного единого магнитного центра, что приводит к дополнительной погрешности в случае измерения компонент неоднородного магнитного поля.
Наиболее близким по технической сущности к предлагаемому изобретению является трехкомпонентный феррозондовый магнитометр, описанный в работах [2, 3] и реализующий способ измерения компонент индукции магнитного поля при помощи векторной компенсации. В данных работах, трехкомпонентный феррозондовый датчик, установлен внутри куба, являющегося каркасом для трехкомпонентной системы катушек компенсации. Сердечник феррозондового датчика выполнен в виде эллиптических витков ферромагнитного материала, укрепленных на керамической трубке. Формируемые феррозондовым датчиком сигналы второй гармоники поступают на входы соответствующих электронных каналов. Три идентичных канала охвачены обратными связями «по полю», причем вырабатываемые каждым каналом токи компенсации поступают в соответствующие катушки компенсации, расположенные на внешнем каркасе и имеющие общий магнитный центр.
Недостатком этого магнитометра является невысокая надежность и повышенные массогабаритные характеристики датчика магнитометра.
В данном устройстве реализован способ измерения компонент индукции магнитного поля при помощи векторной компенсации индукции магнитного поля при использовании в конструкции датчика дополнительных компенсационных катушек по каждой компоненте, размещенных на внешнем каркасе.
Способ включает в себя одновременное измерение напряжения сигналов, наведенных в измерительных катушках и пропорциональных трем компонентам индукции внешнего магнитного поля, преобразование в токи компенсации, формирование этими токами вектора индукции компенсационного магнитного поля с помощью компенсационных катушек.
К недостаткам данного способа следует отнести необходимость использования дополнительных катушек компенсации для обеспечения ортогональности компонент феррозондового датчика, которые должны удовлетворять следующим требованиям:
- каждая катушка компенсации должна быть параллельна измерительной катушке по одноименной компоненте;
- каждая катушка компенсации должна быть взаимноортогональна катушкам компенсации по двум другим компонентам;
что представляет определенные трудности при изготовлении феррозонда. Невыполнение этих требований приводит к увеличению погрешности измерений компонент индукции магнитного поля.
Этот феррозондовый магнитометр и способ измерения компонент индукции магнитного поля при помощи векторной компенсации индукции магнитного поля в объеме сердечника выбраны в качестве прототипа.
Техническим результатом изобретения является снижение погрешности измерений компонент индукции магнитного поля, обусловленных непараллельностью измерительных и компенсационных катушек по каждой компоненте в датчике с совмещенным центром измерений, уменьшение количества требуемых при измерениях катушек в датчике, и, следовательно, повышение надежности и уменьшение массогабаритных показателей датчика магнитометра.
Технический результат достигается тем, что в феррозондовом магнитометре, содержащем генератор возбуждения феррозондового датчика, феррозондовый трехкомпонентный датчик с совмещенным магнитным центром, который состоит из сердечника с эллиптическими витками ферромагнитного материала, катушки возбуждения и трех измерительных катушек, выходы которых подключены на входы трех идентичных каналов обработки сигнала, каждый из которых содержит синхронный детектор, выход которого подключен к входу полосового усилителя, выход которого подключен к входу цепи формирования тока компенсации и к входу регистрирующего устройства, в каждый канал обработки сигнала включена согласующая цепь. В согласующую цепь подключена индуктивность, которая представляет высокоомную нагрузку по переменному току для датчика. Причем индуктивность своими выводами подключена к первому и второму входам согласующей цепи, выход которой подключен к входу синхронного детектора, первый вход подключен к выходу цепи формирования тока компенсации, а второй вход - к выходу соответствующей измерительной катушки, являющейся одновременно катушкой компенсации.
Технический результат достигается тем, что в способе измерения компонент индукции магнитного поля при помощи векторной компенсации, включающем в себя одновременное преобразование индукции внешнего магнитного поля в напряжение переменного тока, наведенное в трех измерительных катушках и пропорциональное трем взаимноортогональным компонентам индукции внешнего магнитного поля, подавление первой и усиление в режиме параметрического резонанса второй гармоник поля перемагничивания в снимаемых с измерительных катушек сигналах, амплитудное детектирование и усиление сигналов, регистрацию выходного напряжения, преобразование этого напряжения в токи компенсации и последующую векторную компенсацию индукции магнитного поля, после преобразования индукции внешнего магнитного поля в напряжение переменного тока, это напряжение подают в согласующие цепи и токи компенсации, преобразованные из выходного напряжения, также подают в согласующие цепи, где производят развязку переменных токов с измерительных катушек и постоянных токов компенсации, а векторную компенсацию производят путем подачи токов компенсации непосредственно в измерительные катушки.
На чертеже иображена структурная схема феррозондового магнитометра, в котором реализован предлагаемый способ.
Феррозондовый магнитометр состоит из:
- генератора возбуждения 1;
- феррозондового трехкомпонентного датчика 2, содержащего сердечник 3 с эллиптическими витками ферромагнитного материала, катушку возбуждения 4 и измерительные катушки 5, 6, 7;
- трех идентичных каналов обработки сигнала 8, 9, 10, каждый из которых содержит согласующую цепь 11 с индуктивностью 12, синхронный детектор 13, полосовой усилитель 14, цепь формирования тока компенсации 15;
- регистрирующего устройства 16.
Способ измерения компонент индукции магнитного поля при помощи векторной компенсации реализуется следующим образом.
Измерение трех компонент X, Y, Z вектора индукции магнитного поля производят с помощью феррозондового трехкомпонентного датчика 2 и трех идентичных каналов 8, 9, 10.
Пояснение способа измерения приведено на принципах работы одного канала 8, обеспечивающего измерение компоненты Х вектора индукции внешнего магнитного поля.
Преобразование индукции внешнего магнитного поля с помощью датчика 2 в напряжение переменного тока реализуется следующим образом.
С генератора возбуждения 1 переменный сигнал частотой f передают в датчик 2 на катушку возбуждения 4 и перемагничивают сердечник 3 датчика 2 по предельной петле гистерезиса на частоте f.
Компонента Х индукции внешнего магнитного поля (проекция вектора индукции внешнего магнитного поля на ось X), воздействуя на сердечник 3, приводит к возникновению в измерительной катушке 5 напряжения переменного тока, модулированного с частотой 2f. Величина напряжения пропорциональна значению проекции вектора индукции внешнего магнитного поля на ось Х (компонента X), а фаза изменяется на π радиан при изменении знака проекции на противоположный.
Затем, согласно изобретению, напряжение переменного тока подают в согласующую цепь 11, где производят развязку переменного тока с измерительной катушки 5 и постоянного тока после цепи формирования тока компенсации 15. Развязка осуществляется путем разделение нагрузок по постоянному току компенсации и переменному току с измерительной катушки.
В согласующую цепь 11 подключена индуктивность 12. Катушка индуктивности, как электрорадиоизделие, широко известна, однако при введении в указанной связи с остальными элементами схемы в феррозондовый магнитометр выполняет четыре различные функции. С помощью индуктивности сглаживают технологический разброс собственной индуктивности датчика, возникающий при изготовлении сердечника. Наличие индуктивности в схеме позволяет использовать датчик с большим числом витков в измерительной катушке, что увеличивает напряжение переменного тока с измерительной катушки. Наличие индуктивности позволяет добиться параметрического резонанса в контуре измерительной катушки на второй гармонике частоты перемагничивания и одновременно индуктивность является частью режекторного фильтра, настроенного на первую гармонику частоты перемагничивания. То есть в согласующей цепи производят режекторное подавление частоты f и усиление в режиме параметрического резонанса второй гармоники поля перемагничивания на частоте 2f.
Далее производят амплитудное детектирование измеряемого сигнала. Для этого измеряемый сигнал подают на синхронный детектор 13. Также на синхронный детектор 13 подают разнополярные сигналы на частоте 2f с генератора возбуждения 1. Синхронный детектор 13 производит выделение квазипостоянной огибающей сигнала (амплитудную демодуляцию).
В дальнейшем полученный сигнал усиливают до требуемого уровня с помощью полосового усилителя 14 и подают в цепь формирования тока компенсации 15 и в регистрирующее устройство 16, по показаниям которого оценивают величину индукции внешнего магнитного поля.
Цепью формирования тока компенсации 15 преобразовывают сигнал с выхода полосового усилителя 14 в ток компенсации Iк, который пропорционален значению проекции вектора индукции внешнего магнитного поля на ось X.
Далее, согласно изобретению, ток компенсации Iк подают в согласующую цепь 11, где, как было ранее сказано, производят развязку переменного тока с измерительной катушки 5 и постоянного тока компенсации Iк.
После согласующей цепи 11 ток компенсации Iк подают в измерительную катушку 5. Таким образом, измерительная катушка 5 одновременно является компенсационной катушкой. С помощью измерительной катушки 5 током компенсации 1к формируют компоненту Х вектора индукции компенсационного магнитного поля, которая параллельна и противонаправлена компоненте Х вектора индукции внешнего магнитного поля, и тем самым, производят векторную компенсацию внешнего магнитного поля по компоненте X.
При одновременной работе всех трех каналов 8, 9, 10 измерительными катушками 5, 6, 7 формируют вектор индукции компенсационного магнитного поля, который является параллельным и противоположным по направлению вектору индукции внешнего магнитного поля. Вектор индукции внешнего магнитного поля в объеме сердечника 3 уравновешивают (компенсируют) вектором индукции компенсационного магнитного поля, чем обеспечивают стабилизацию коэффициента преобразования и снижение погрешности измерений компонент индукции магнитного поля.
Феррозондовый магнитометр работает следующим образом.
Измерение трех компонент X, Y, Z вектора индукции магнитного поля производится тремя каналами 8, 9, 10. Все каналы выполнены по идентичным схемам.
Рассмотрим работу одного канала 8, обеспечивающего измерение компоненты Х вектора индукции внешнего магнитного поля.
Генератор возбуждения 1, настроенный на частоту f, подключен к катушке возбуждения 4 и обеспечивает перемагничивание сердечника 3 датчика 2 по предельной петле гистерезиса на частоте f.
При измерениях индукции магнитного поля датчик 2 преобразовывает воздействующий на него внешний сигнал (проекцию вектора индукции внешнего магнитного поля на ось X) в напряжение переменного тока, наведенное в измерительной катушке 5 и модулированное с частотой 2f. Напряжение пропорционально значению проекции вектора индукции внешнего магнитного поля на ось Х (компонента X), а фаза изменяется на π радиан при изменении знака проекции на противоположный. Выход измерительной катушки 5 подключен на первый вход согласующей цепи 11, которая обеспечивает функцию развязки тока компенсации и измеряемого сигнала, наведенного в измерительной катушке 5.
В согласующую цепь 11 подключена индуктивность 12, которая представляет высокоомную нагрузку по переменному току для датчика, и выполняет функцию развязки тока компенсации и измеряемого сигнала, сглаживает технологический разброс собственной индуктивности феррозондового датчика, возникающий при изготовлении сердечника и, тем самым, способствует настройке измерительной катушки в резонанс на второй гармонике частоты перемагничивания и настройке режекторного фильтра на подавление первой гармоники частоты перемагничивания.
Выход согласующей цепи 11 подключен на сигнальный вход синхронного детектора 13. На управляющий вход синхронного детектора 13 подаются разнополярные сигналы с генератора возбуждения 1 на частоте 2f. Выход синхронного детектора 13 подключен к входу полосового усилителя 14, который имеет коэффициент усиления порядка 700, что обеспечивает коэффициент компенсации на уровне К=0,98. Выход полосового усилителя 14 подключен к цепи формирования тока компенсации 15 и к регистрирующему устройству 16. В качестве регистрирующего устройства 16 использован аналого-цифровой преобразователь со схемой индикации.
Цепью компенсации 15 формируется ток Iк, определяемый коэффициентом компенсации К и пропорциональный напряжению на выходе полосового усилителя 13 и значению проекции вектора индукции внешнего магнитного поля на ось X.
Выход цепи формирования тока компенсации 15 подключен на второй вход согласующей цепи 11 к индуктивности 12. Далее, согласно изобретению, ток компенсации Iк подается в измерительную катушку 5, с помощью которой воспроизводится токами компенсации компонента Х вектора индукции компенсационного магнитного поля, которая параллельна и противонаправлена компоненте Х вектора индукции внешнего магнитного поля.
При одновременной работе всех трех каналов 8, 9, 10 результирующий вектор индукции компенсационного магнитного поля является параллельным и противоположным по направлению вектору индукции внешнего магнитного поля. Таким образом, схема каждого измерительного канала охвачена отрицательной обратной связью «по полю», с использованием непосредственно измерительных катушек 5, 6, 7 феррозондового трехкомпонентного датчика 2. Результирующий вектор индукции внешнего магнитного поля в объеме сердечника 3 уравновешивается (компенсируется) вектором индукции компенсационного магнитного поля, что обеспечивает стабилизацию коэффициента преобразования и снижение погрешности измерений компонент индукции магнитного поля.
На феррозондовом магнитометре, изготовленном по предлагаемой схеме, и в котором реализован способ измерения компонент индукции магнитного поля, проведены предварительные испытания и испытания в целях утверждения типа средств измерения.
Литература
1. Описание изобретения к патенту RU 2103703 С1, заявка 96100386/09 от 11.01.1996 г., МПК: G01R 33/02, Автор: Семенов И.А., Патентообладатель: Малое инновационное предприятие «АРАС»
2. Афанасьев Ю.В. Бушуев Л.Я. Трехкомпонентный феррозонд // Приборы и системы управления. 1978. №1. с.29-31.
3. Афанасьев Ю.В. Феррозондовые приборы. - Л.: Энергоатомиздат, 1986, с.117
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| Цифровой феррозондовый магнитометр | 1980 |
|
SU920594A1 |
| Способ измерения компонент магнитного поля | 2020 |
|
RU2737726C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| Тонкопленочный градиентометр | 2018 |
|
RU2687557C1 |
| Магнитометр с устройством компенсации магнитных помех от носителя | 1977 |
|
SU693319A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1998 |
|
RU2152002C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРИРАЩЕНИЯ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ТРЕХКОМПОНЕНТНЫМ ДИФФЕРЕНЦИАЛЬНЫМ МАГНИТОМЕТРОМ | 2006 |
|
RU2313801C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНДУКЦИИ ГЕОМАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2236029C1 |
Изобретение относится к измерительной технике, представляет собой феррозондовый магнитометр и способ измерения компонент индукции магнитного поля при помощи векторной компенсации и может использоваться в точных измерениях компонент индукции магнитного поля. При реализации способа одновременно преобразуют индукцию внешнего магнитного поля в напряжение переменного тока, наведенное в трех измерительных катушках и пропорциональное трем взаимноортогональным компонентам индукции внешнего магнитного поля, подавляют первую и усиливают в режиме параметрического резонанса вторую гармоники поля перемагничивания в снимаемых с измерительных катушек сигналах, осуществляют амплитудное детектирование и усиление сигналов, регистрацию выходного напряжения, преобразование этого напряжения в токи компенсации. Напряжение переменного тока и токи компенсации подают в согласующие цепи, где производят развязку переменных токов с измерительных катушек и постоянных токов компенсации, а векторную компенсацию производят путем подачи токов компенсации непосредственно в измерительные катушки. Техническим результатом является снижение погрешности измерений компонент индукции магнитного поля, повышение надежности и уменьшение массогабаритных показателей датчика магнитометра. 2 н.п. ф-лы, 1 ил.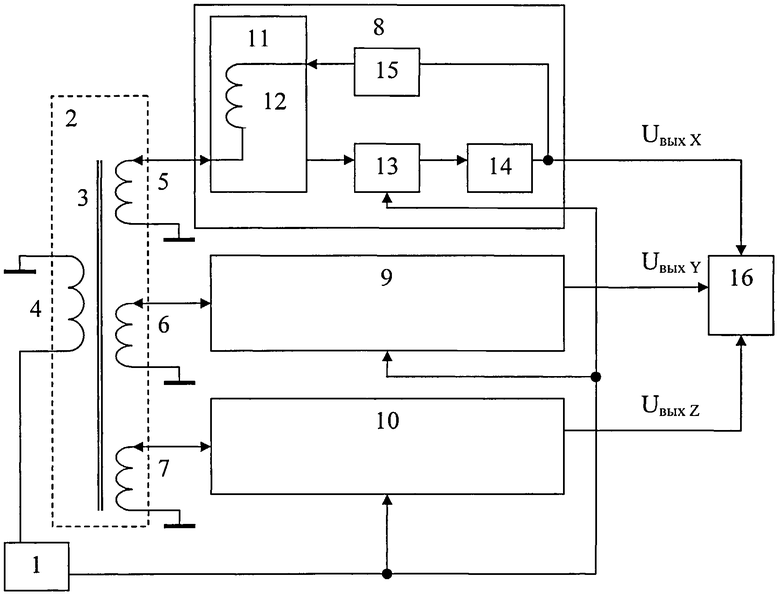
1. Феррозондовый магнитометр, содержащий генератор возбуждения феррозондового датчика, феррозондовый трехкомпонентный датчик с совмещенным магнитным центром, который состоит из сердечника с эллиптическими витками ферромагнитного материала, катушки возбуждения и трех измерительных катушек, выходы которых подключены на входы трех идентичных каналов обработки сигнала, каждый из которых содержит синхронный детектор, выход которого подключен к входу полосового усилителя, выход которого подключен к входу цепи формирования тока компенсации и к входу регистрирующего устройства, отличающийся тем, что в каждый канал обработки сигнала включена согласующая цепь, в которую подключена индуктивность, которая представляет высокоомную нагрузку по переменному току для датчика, причем индуктивность своими выводами подключена к первому и второму входам согласующей цепи, выход которой подключен к входу синхронного детектора, первый вход подключен к выходу цепи формирования тока компенсации, а второй вход - к выходу соответствующей измерительной катушки, являющейся одновременно катушкой компенсации.
2. Способ измерения компонент индукции магнитного поля при помощи векторной компенсации, включающий в себя одновременное преобразование индукции внешнего магнитного поля в напряжение переменного тока, наведенное в трех измерительных катушках и пропорциональное трем взаимноортогональным компонентам индукции внешнего магнитного поля, подавление первой и усиление в режиме параметрического резонанса второй гармоник поля перемагничивания в снимаемых с измерительных катушек сигналах, амплитудное детектирование и усиление сигналов, регистрацию выходного напряжения, преобразование этого напряжения в токи компенсации и последующую векторную компенсацию индукции магнитного поля, отличающийся тем, что после преобразования индукции внешнего магнитного поля в напряжение переменного тока это напряжение подают в согласующие цепи и токи компенсации, преобразованные из выходного напряжения, также подают в согласующие цепи, где производят развязку переменных токов с измерительных катушек и постоянных токов компенсации, а векторную компенсацию производят путем подачи токов компенсации непосредственно в измерительные катушки.
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 1996 |
|
RU2103703C1 |
| Афанасьев Ю.В., Бушуев Л.Я | |||
| Трехкомпонентный феррозонд // Приборы и системы управления | |||
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Солесос | 1922 |
|
SU29A1 |
| Афанасьев Ю.В | |||
| Феррозондовые приборы | |||
| - Л.: Энергоатомиздат, 1986, с.117 | |||
| Фотоэлектрический экспозиметр | 1956 |
|
SU108638A1 |
| SU 713335 A1, 15.03.1981 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

