Изобретение относится к конструированию и производству электрических машин (ЭМ), в частности ЭМ постоянного тока, как коллекторных, так и вентильных, и может быть использовано при разработке и изготовлении указанных ЭМ, в первую очередь мо- ментных (обычно тихоходных) электродвигателей с повышенной равномерностью вращения вала.
Целью изобретения является расширение технологических возможностей путем обеспечения изготовления сердечников различных конструкций и из различных материалов, в том числе из магнитных сплавов.
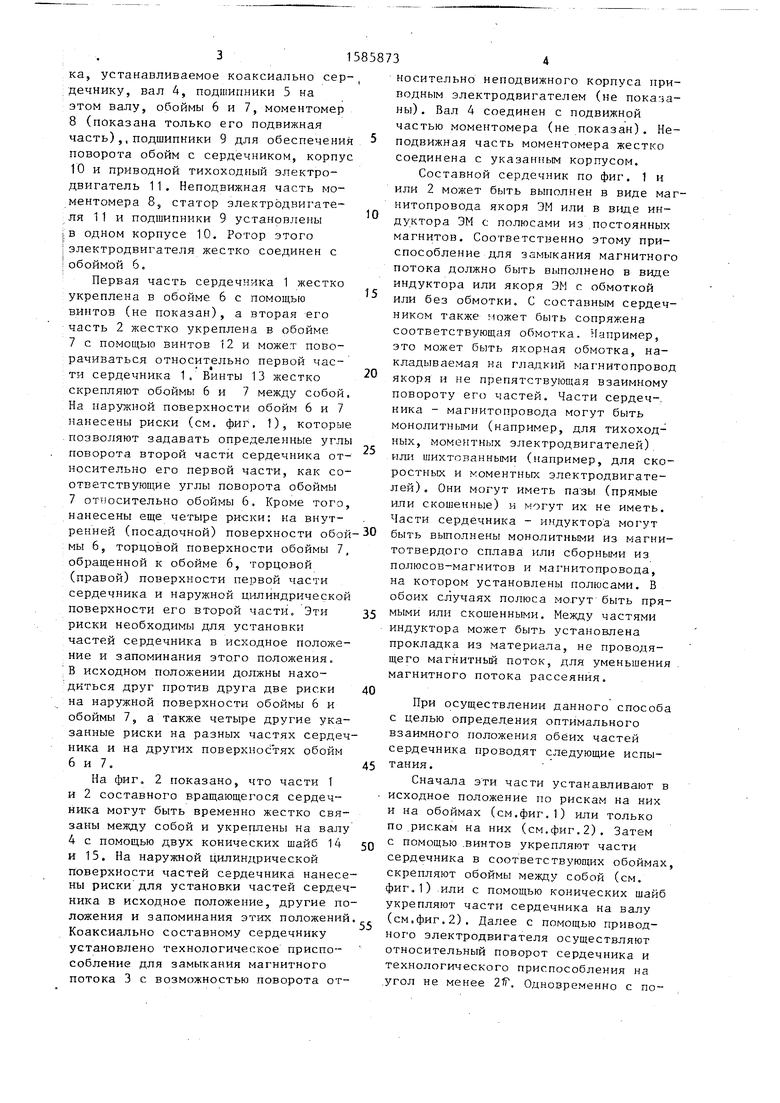
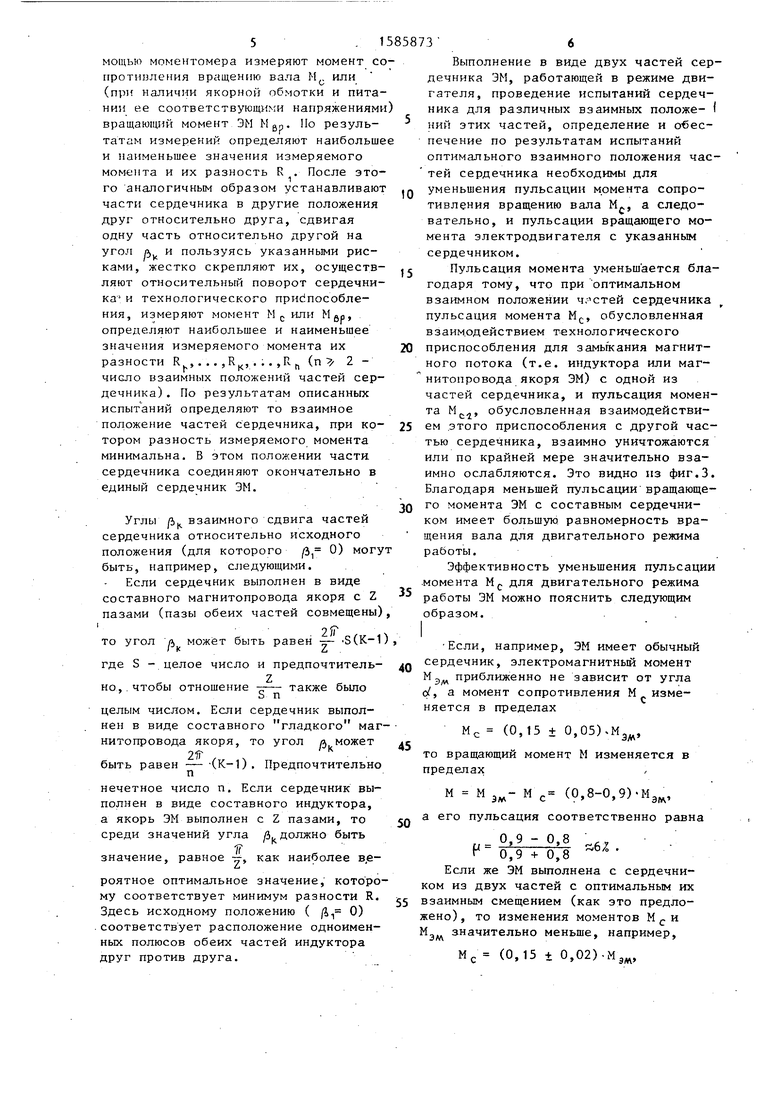
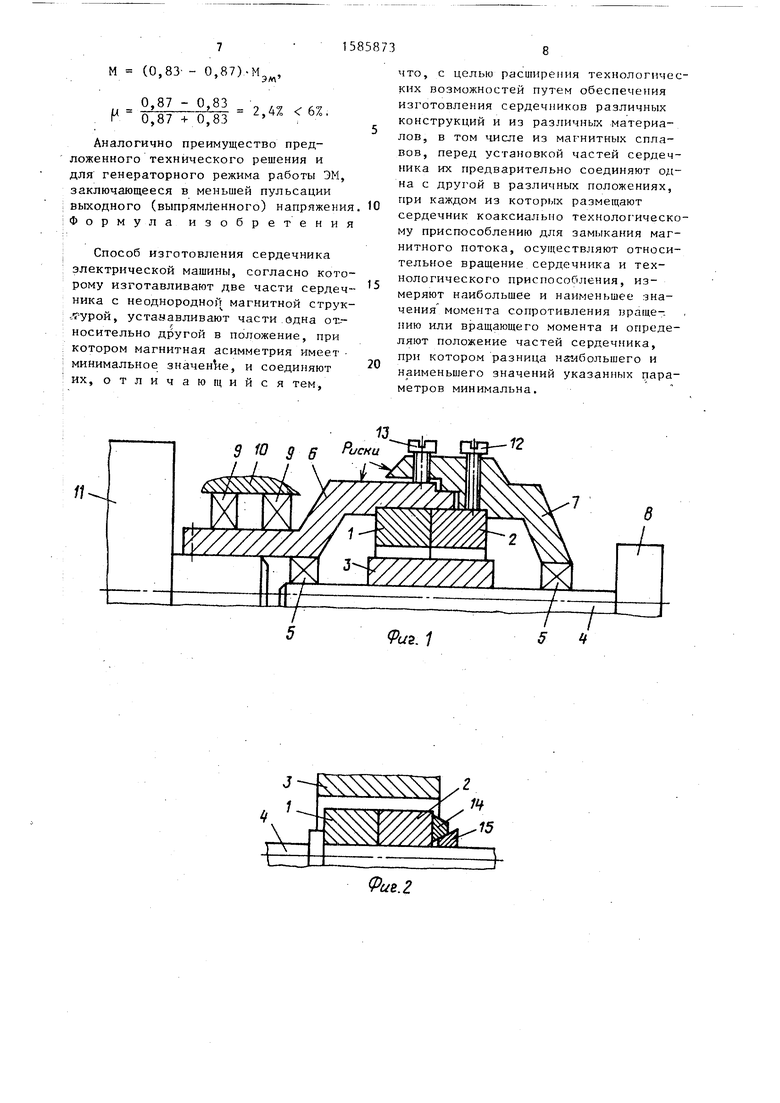
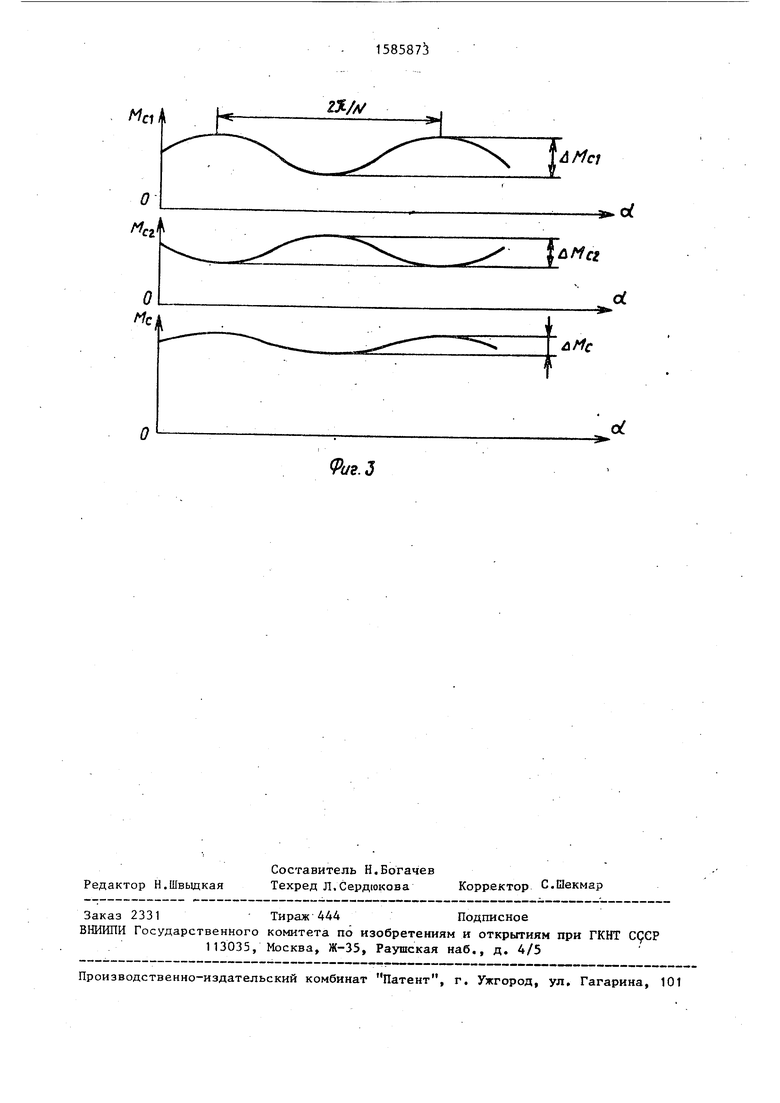
На фиг. 1 изображена схема испытаний сердечника, устанавливаемого на статоре ЭМ и состоящего из двух частей (цель испытаний - определение оптимального взаимного положения частей сердечника ЭМ) , на фиг. 2 - крепление на роторе (валу) сердечника, состоящего из двух частей на фиг. 3 - зависимости от угла «/поворота ротора относительно статора двух частных моментов М(., , общего момента MC сопротивления вращению ротора, обусловленных взаимодействием технологического приспособления для замыкания магнитного потока соответственно с первой, второй частью сердечника и со всем сердечником.
Схема испытаний на фиг. 1 содержит первую часть составного сердечника ЭМ 1, вторую часть этого сердечника 2, технологическое приспособление 3 для замыкания магнитного потоСП
СХ)
сд
00
ч1
со
ка, устанавливаемое коаксиально сердечнику, вал 4, подшипники 5 на этом валу, обоймы 6 и 7, моментомер 8 (показана только его подвижная часть),,подшипники 9 для обеспечения поворота обойм с сердечником, корпус 10 и приводной тихоходный электродвигатель 11. Неподвижная часть мо- ментомера 8, статор электродвигателя 11 и подшипники 9 установлены tB одном корпусе 10. Ротор этого электродвигателя жестко соединен с I обоймой 6.
Первая часть сердечника 1 жестко укреплена в обойме 6 с помощью винтов (не показан), а вторая его часть 2 жестко укреплена в обойме 7 с помощью винтов 12 и может поворачиваться относительно первой части сердечника 1. Винты 13 жестко скрепляют обоймы 6 и 7 между собой. На наружной поверхности обойм 6 и 7 нанесены риски (см. фиг. 1), которые позволяют задавать определенные углы поворота второй части сердечника относительно его первой части, как соответствующие углы поворота обоймы 7 оттюсительно обоймы 6. Кроме того, нанесены еще четыре ри-ски: на внут10
15
20
25
носительно неподвижного корпуса при водным электродвигателем (не показа ны) . Вал 4 соединен с подвижной частью моментомера (не показан), Не подвижная часть моментомера жестко соединена с указан 1ым корпусом.
Составной сердечник по фиг. 1 и или 2 может быть выполнен в виде маг нитопровода якоря ЭМ или в виде индуктора ЭМ с полюсами из .постоянных магнитов. Соответственно этому приспособление для замыкания магнитного потока должно быть выполнено в виде индуктора или якоря ЭМ с обмоткой или без обмотки, С составным сердечником также может быть сопряжена соответствующая обмотка. Например, это может быть якорная обмотка, накладываемая на гладкий магнитопровод якоря и не препятствующая взаимному повороту его частей. Части сердеч-. ника - магнитопровода могут быть монолитными (например, для тихоходных, момергтных электродвигателей) или шихтованными (например, для ско- ростньк и моментных электродвигателей) , Они могут иметь па зы (прямые или скошенные) и могут их не иметь. Части сердечника - индуктора могут
,- -iiii- i ai-i ,у t4iupcl MOIyT
ренней (посадочной) поверхности обой-30 быть выполнены монолитными из магнимы 6, торцовой поверхности обоймы 7, обращенной к обойме 6, торцовой (правой) поверхности первой части сердечника и наружной цилиндрической поверхности его второй части. Эти риски необходимы для установки частей сердечника в исходное положение и запоминания этого положения, В исходном положении должны находиться друг против друга две риски на наружной поверхности обоймы 6 и обоймы 7, а также четыре другие указанные риски на разных частях сердечника и на других поверхностях обойм 6 и 7.
На фиг. 2 показано, что части 1 и 2 составного вращающегося сердечника могут быть временно жестко связаны между собой и укреплены на валу 4 с помощью двух конических шайб 14 и 15, На наружной цилиндрической поверхности частей сердечника нанесены риски для установки частей сердечника в исходное положение, другие положения и запоминания этих положений. Коаксиально составному сердечнику установлено технологическое приспособление для замыкания магнитного потока 3 с возможностью поворота от35
40
45
50
55
тотвердого сплава или сборными из полюсов-магнитов и магнитопровода, на котором установлены полюсами. В обоих случаях полюса могут быть прямыми или скошенными. Между частями индуктора может быть установлена прокладка из материала, не проводящего магнитный поток, для уменьшения магнитного потока рассеяния.
При осуществлении данного способа с целью определения оптимального взаимного положения обеих частей сердечника проводят Соаедующие испытания.
Сначала эти части устанавливают в исходное положение по рискам на них и на обоймах (см.фиг.1) или только по .рискам на них (см.фиг.2). Затем с помощью .винтов укрепляют части сердечника в соответствуюпщх обоймах, скрепляют обоймы между собой (см. фиГоО или с помощью конических шайб укрепляют части сердечника на валу (см.фиг.2). Далее с помощью приводного электродвигателя осуществляют относительный поворот сердечника и технологи еского приспособления на .угол не менее 2. Одновременно с по0
5
0
5
носительно неподвижного корпуса приводным электродвигателем (не показаны) . Вал 4 соединен с подвижной частью моментомера (не показан), Неподвижная часть моментомера жестко соединена с указан 1ым корпусом.
Составной сердечник по фиг. 1 и или 2 может быть выполнен в виде маг- нитопровода якоря ЭМ или в виде индуктора ЭМ с полюсами из .постоянных магнитов. Соответственно этому приспособление для замыкания магнитного потока должно быть выполнено в виде индуктора или якоря ЭМ с обмоткой или без обмотки, С составным сердечником также может быть сопряжена соответствующая обмотка. Например, это может быть якорная обмотка, накладываемая на гладкий магнитопровод якоря и не препятствующая взаимному повороту его частей. Части сердеч-. ника - магнитопровода могут быть монолитными (например, для тихоходных, момергтных электродвигателей) или шихтованными (например, для ско- ростньк и моментных электродвигателей) , Они могут иметь па зы (прямые или скошенные) и могут их не иметь. Части сердечника - индуктора могут
,- -iiii- i ai-i ,у t4iupcl MOIyT
0 быть выполнены монолитными из магни5
0
5
0
5
тотвердого сплава или сборными из полюсов-магнитов и магнитопровода, на котором установлены полюсами. В обоих случаях полюса могут быть прямыми или скошенными. Между частями индуктора может быть установлена прокладка из материала, не проводящего магнитный поток, для уменьшения магнитного потока рассеяния.
При осуществлении данного способа с целью определения оптимального взаимного положения обеих частей сердечника проводят Соаедующие испытания.
Сначала эти части устанавливают в исходное положение по рискам на них и на обоймах (см.фиг.1) или только по .рискам на них (см.фиг.2). Затем с помощью .винтов укрепляют части сердечника в соответствуюпщх обоймах, скрепляют обоймы между собой (см. фиГоО или с помощью конических шайб укрепляют части сердечника на валу (см.фиг.2). Далее с помощью приводного электродвигателя осуществляют относительный поворот сердечника и технологи еского приспособления на .угол не менее 2. Одновременно с помощью моментомера измеряют момент со- протиБления вращению вала М.. или
О
(при наличии якорной обмотки и питании ее cooтвeтcтвyющи :и напряжениями) вращающий момент ЭМ Ngn. Но результатам измерений определяют наибольшее и наименьшее значения измеряемого момента и их разность R . После этого аналогичным образом устанавливаю части сердечника в другие положения друг относительно друга, сдвигая одну часть относительно другой на угол Л| и пользуясь указанными рисками, жестко скрепляют их, осуществляют относительньт поворот сердечника и технологического пpиdпocoблe- ния, измеряют момент М , или Mgp, определяют наибольшее и наименьшее значения измеряемого момента их разности R ,. .. ,R|, . .. ,R (п 2 - число взаимных положений частей сердечника) , По результатам описанных испытаний определяют то взаимное положение частей сердечника, при котором разность измеряемого момента минимальна. В этом положении части, сердечника соединяют окончательно в единый сердечник ЭМ.
Углы /i| взаимного сдвига частей сердечника относительно исходного положения (для которого ft 0) могу быть, например, следующими.
Если сердечник выполнен в виде составного магнитопровода якоря с Z пазами (пазы обеих частей совмещены)
2}Г
то угол А может быть равен - S(K-1 /к .
где S - целое число чтобы отношение
и предпочтительZ
7г- также было S п
целым числом. Если сердечник выпол,11
но
нен в виде составного нитопровода якоря, то 21Г
гладкого маг угол А может
быть равен --(K-l). Предпочтительно п
нечетное число п. Если сердечник выполнен в виде составного индуктора, а якорь ЭМ выполнен с Z пазами, то среди значений угла /3, должно быть
значение, равное , как наиболее в,е
роятное оптимальное значение, которому соответствует минимум разности R. Здесь исходному положению ( /i 0) .соответствует расположение одноименных полюсов обеих частей индуктора друг против друга.
) е
т
,
,
585873 6
Выполнение в виде двух частей сердечника ЭМ, работающей в режиме двигателя, проведение испытаний сердечника для различных взаимных положе- ( НИИ этих частей, определение и обеспечение по результатам испытаний оптимального взаимного положения частей сердечника необходимы для уменьшения пульсации момента сопро10
15
20
25
30
35
40
тивления вращению вала М, а следовательно, и пульсации вращающего момента электродвигателя с указанным сердечником.
Пульсация момента уменьшается благодаря тому, что при оптимальном взаимном положении ч,- стей сердечника пульсация момента М., обусловленная взаим.одейстБием технологического приспособления для замыкания магнитного потока (т.е. индуктора или магнитопровода якоря ЭМ) с одной из частей сердечника, и пульсация момента М., обусловленная взаимодействием .этого приспособления с другой частью сердечника, взаимно уничтожаются или по крайней мере значительно взаимно ослабляются. Это видно из фиг.З. Благодаря меньшей пульсации вращающего момента ЭМ с составным сердечником имеет большую равномерность вращения вала для двигательного режима работы.
Эффективность уменьшения пульсации .момента М, для двигательного режима работы ЭМ можно пояснить следующим образом.
Если, например, ЭМ имеет обычный сердечник, электромагнитный момент , приближенно не зависит от угла 0, а момент сопротивления няется в пределах
М изме
MC (0,15 ± 0,05)«Мз,
то вращающий момент М изменяется в пределах
М М ,„- М (0.8-0.9)-М.
Э1А
а его пульсация соответственно равна 0,9 - 0,8 ,р о:9-ь о:8 - Если же ЭМ выполнена с сердечником из двух частей с оптимальным их взаимным смещением (как это предложено) , то изменения моментов М j, и значительно меньше, например,
MC (0,15 ± 0,02).Мэ,
1585873
М (0,83- - 0,87).М
эм
0,87 - 0,83 К- 0,87 0,83
Аналогично преимущество предложенного технического решения и для генераторного режима работы ЭМ, заключающееся в меньшей пульсации выходного (выпрямленного) напряжения Формула изобретения
Способ изготовления сердечника электрической машины, согласно которому изготавливают две части сердеч- ника с неоднородной магнитной струк- Л урой, устанавливают части бдна от.- носительно другой в положение, при котором магнитная асимметрия имеет минимальное значен1 е, и соединяют их, отличающийся тем.
8
что, с целью расширения технологических возможностей путем обеспечения изготовления сердечников различных конструкций и из различных материалов, в том числе из магнитных сплавов, перед установкой частей сердечника их предварительно соединяют одна с другой в различных положениях, при каждом из которых размещают сердечник коаксиально технологическому приспособлению для замыкания магнитного потока, осуществляют относительное вращение сердечника и технологического приспособления, измеряют наибольшее и наименьшее значения момента сопротивления враще-. нию или вращающего момента и определяют положение частей сердечника, при котором разница наибольшего и наименьшего значений указанных iiapa- метров минимальна.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2000 |
|
RU2179780C2 |
| Вентильный электродвигатель | 1984 |
|
SU1270846A1 |
| Вентильный электродвигатель | 1987 |
|
SU1480046A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2159494C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| ОБРАЩЕННАЯ СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2024 |
|
RU2829489C1 |
| Вентильная электрическая машина | 1985 |
|
SU1359862A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2001 |
|
RU2207692C2 |
| Вентильный электродвигатель | 1985 |
|
SU1350774A1 |
Изобретение относится к конструированию и производству электрических машин. Целью изобретения является расширение технологических возможностей изготовления сердечников из различных материалов и различных конструкций. Указанная цель достигается тем, что изготавливают две части сердечника с неоднородной магнитной структурой, осуществляют их предварительное соединение в обоймах, размещая сердечник коаксиально технологическому приспособлению для замыкания магнитного потока, производят при относительном вращении сердечника и технологического приспособления замер наибольшего и наименьшего значений, например, момента сопротивления вращению и определяют положение частей сердечника, при котором разница указанных значений моментов минимальна. Определение оптимального положения частей сердечника позволяет снизить пульсации момента вращения двигателей и пульсации выходного напряжения генераторов. 3 ил.
/
12
Риг. 1
ff
.2
м,
ct/i
2%/
м,
сг
А/с
9иг.З
1
ЛМс
J/iAf«
| Способ изготовления пакета магнитопровода электрической машины | 1985 |
|
SU1275664A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
