Изобретение относится к радиотехнике и радиоизмерительной технике и может быть использовано в фазочувст- вительных приборах.
Цель изобретения - повышение точности.
На фиг. 1 приведена структурно- функциональная схема устройства дпя
синхронного преобразованияэ первый варианту на фиг, 2 - то же. Второй вариант j
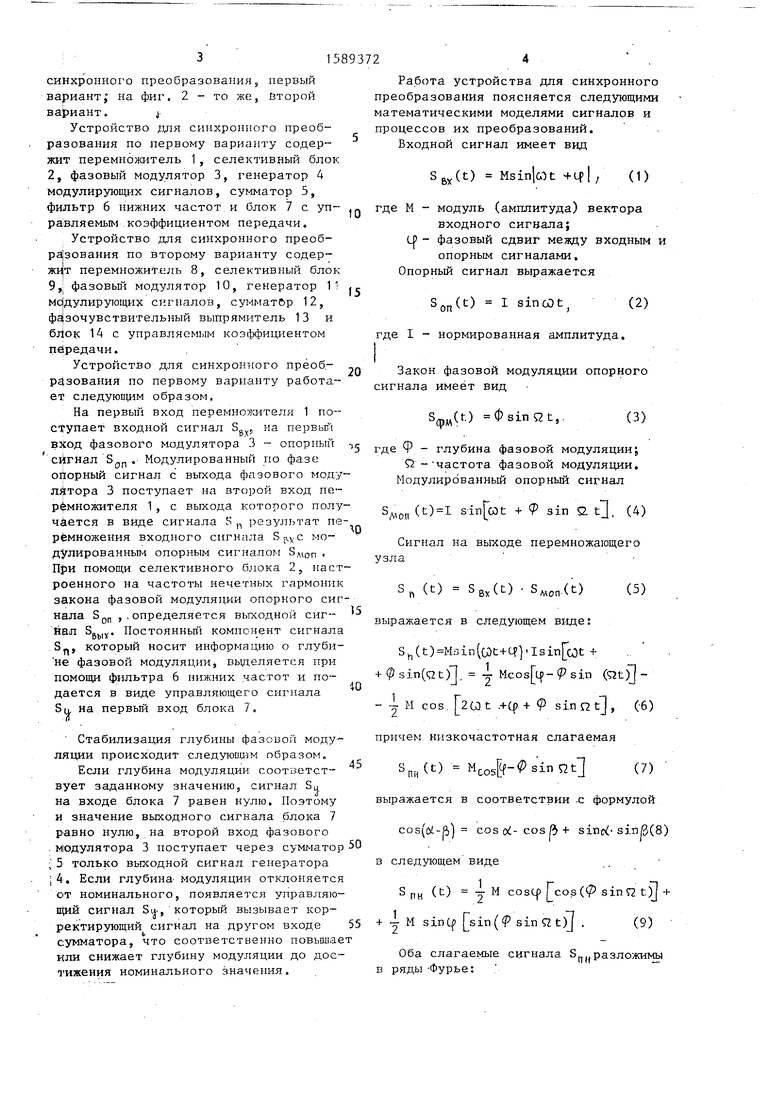
Устройство для синхронного преобразования по первому варианту содержит перемножитель 1, селективный блок 2, фазовый модулятор 3, генератор 4 модулирующих сигналов, сумматор 5, фильтр 6 нижних частот и блок 7 с уп- райляемым коэффициентом передачи.
Устройство для синхронного преоб- ра|зования по второму варианту содер- перемножит.ель 8, селективный блок 9,; фазовьп модулятор 10, генератор 11 мс|дулиру1ощих сигналов, cyi-iMaTdp 12, Ф4эочувствительный выпрямитель 13 и блок 14 с управляемым коэффициентом передачи.
Устройство для синхронного преобразования по первому варианту работа-- et следуюишм образом.
На первый вход перемнояштеля 1 поступает входной сигнал S на первьш вход фазового модулятора 3 - опорный сигнал S j . Модулированный по фазе ойорный сигнал с выхода фазового моду лйтора 3 поступает на второй вход пе- рфмножителя 1, с выхода которого полу чйется в виде сигнала S результат перемножения входного сигнала S;(-c модулированным опорным сигналом Зд1рп При помощи селективного блока 2, насТ роенного на частоты нечетных гармоник закона фазовой модуляции опорного сиг нала S
нал S.
QP ,. определяется выходной сиг- Постоянньп компонент сигнала
BblV
S, который носит информацию о глуби- не фазовой модуляции, выделяется при помощи фильтра 6 нижних .частот и подается в виде управляющего сигнала Sn, на первый вход блока 7.
45
Стабилизация глубины фазовой модуляции происходит следующ-iM образом.
Если глубина модуляции соответствует заданному значению, сигнал Su н-а входе блока 7 равен нулю. Поэтому и значение выходного сигнала блока 7 нулю, на второй вход фазового . модулятора 3 поступает через сумматор 50 ; 5 только выходной сигнал генератора i 4, Если глубина модуляцир отклоняется от номинального, появляется управляющий сигнал So-, который вызывает кор ректирующий сигнал на другом входе сумматора, что соответстЕ енно повьшьает или снижает глубину модуляции до достижения номинального значения.
55
Работа устройства для синхронного преобразования поясняется следующими математическими моделями сигналов и процессов их преобразований.
Входной сигнал имеет вид
) Msinjan (1)
где М - модуль (амплитуда) вектора
входного сигнала; Ц) - фазовый сдвиг между входным и
опорным сигналами. Опорный сигнал выражается
15
Son(t) I sincOt (2)
20
где I - нормированная амплитуда.
Закон фазовой модуляции опорного сигнала имеет вид
.) ,.
(3)
где Ф - глубина фазовой модуляции; Q- частота фазовой модуляции. Модулированный опорный сигнал
Зд,р„ (t)I + Ф sin & t, (4)
Сигнал на выходе перемножающего
узла
з„ (t) Se.Ct) . .M (5) выражается в следующем вгще;
S(t)M3in((;)t+Cf. + (psin(at). -2- ) (;2t)- -i- М cos. 2Q.t .+ q + 9 sinQt, (-6) причем низкочастотная слагаемая
) М о5&-«Р SinQt (7)
выражается в соответствии .с формулой
cos( cosod-cosft+ sinci-sin/3(8) в следующем виде
S р (t) у М созц) соз(Р sinf2 t) +
50
55 + у М sinCp (P sin Qt)J .
(9)
Оба слагаемые сигнала Sj разложимы в ряды -Фурье:
у М cosLf lcos( sin 2t) McQsCf oo .-I((p) cos(2Ks2t) (10)5
k i
15893
- M sin q sin ((p sin 57 t)l
pOO
M sintf ,()sin(2K-1)tl,(11
/
1 де I (ip) - бесселевская функция i-го порядка.
Докажем, что сумма бесселевских
оа
(функций нечетных порядков 21 I (Ф)
цГТ
(по формуле 10) имеет экстремумы при таких значениях аргумента (Р), при которых бесселевская функция нулевого порядка IgC) имеет нули, первьй из которых имеет место при ф (j) 2,4048.
Сумма бесселевских функций нечетных порядков может быть выражена в следую1цем виде:
Zln-,() (P) +
Y f -
. J lo(Z) + IiCZ) (12)
о
После дифференцирования этого выражения получают
l2..(P) (P) м(Ф).
+
+ I,
Так как Г ($) -I, (Ф) , то
00-1 )X (
z:i2.-,(H ih() lo( P) К. -- I t
ше установленного значения ф.
1,(Ф)1 1,(9). (14)
В табл. 1 функции 1 {ф}
приведены зависимости
OCJ
и суммы
„.() от
2lf-i
В окружности (Р 9 2,4048..
40
45
Таблица 1
- 2,4048 рад вызывает управляющий сигнал. Su с отрицательным знаком, который снижает глубину модуляции, а уменьшение глубины модуляции ниже Р вызывает управляющий сигнал Sue положительным знаком, который увеличивает глубину модуляции. Таким образом, автоматически стабилизируется глубина модуляции. При р р управляющий сигнал отсутствует.
На выходе селективного блока 2, 1 (0 выполненного в виде гребенчатого -tri. 50 фильтра, появляется полигармонический
выходной сигнал по формуле (11);
SB,,/t)Msinq),., ()) (2К-1) с,(1 7)
55 который носит информацию о квадратур- ной составляющей (.f s in СО t входного сигнала Sgj(t)Msin (Q t -Ы.|).
Управление может быть осуществлено, например, посредством изменения
26
Результаты анализа табл. 1 показывают, что сумма мало зависит от глубины фазовой модуляции (аргумента) в окружности 9 Ф . Например, увеличение Ф на 2,5% свыше обусловливает уменьшение суммы на 0,04%, а снижение У на 2,5% вызывает уменьшение суммы на 0,07%. Напомним, что отклонение
Фот 9 2,4048 на 10% вызывает уменьшение суммы на 1%. Следовательно, коэффициент стабилизации К, 4 повышает точность устройства более чем в 10 раз.
В то же время зависимость ) от Y имеет относительно высокую крутизрту:
0 ()f.2,4o -1,(2,40) - 0,52
Результаты табл. 1 показывают, что постоянный компонент
()
М
Ч
(15)
25
по формуле (10) с выхода перемножителя 1 может быть использован в качестве сигнала ошибки для автоматической стабилизации глубины фазовой модуляции под управление сигнала
1о(Р)
cosCp
.(16)
5 выделяемого при помощи фильтра 6 нижних частот с коэффициентом передачи
К.
Увеличение глубины модуляции ф свыше установленного значения ф.
- 2,4048 рад вызывает управляющий сигнал. Su с отрицательным знаком, который снижает глубину модуляции, а уменьшение глубины модуляции ниже Р вызывает управляющий сигнал Sue положительным знаком, который увеличивает глубину модуляции. Таким образом, автоматически стабилизируется глубина модуляции. При р р управляющий сигнал отсутствует.
40
45
крутизны модуляционной характерисппш фазового модулятора 3, а также при помощи управления амплитудой генератора 4. Нередко фазовая модуляция ре ализуется цифровыми методами.
Устройство для синхронного.преобразования по второму варианту работа- йт аналогично первому варианту с той разницей, что при помощи фазочувсг вительного выпрямителя 13 вьвделяется и; выпрямляется первая гармоника из в|ыходного сигнала перемножителя 8 S н осящая информацию о глубине фазовой м;одуляции, которая в виде постоянного сигнала S , подается на первьм вход бпока с управляемым коэффициентом передачи. Кроме того, фазочувстви- т ельный вьтрямитель работает синхронно с фазовой модуляцией под дейст ви- ем сигнала с второго выхода генера- topa 11.
Сумма бесселевских функций четных
ОО
имеет зкcтpe y Ы
порядков 1„ (Ф)
)С 1
при таких значениях , при которы имеет место (р, 3j83l7, : Известно, что сумма
со
2211 k-i
2k
(ФУ
(18)
Дифференцирование этой суммы дав ciлeдyюш й результат: со
II
IO(P) 2 2: 1.) 0. (19)
переменный компонент М1, (f по формуле (11) с выхода пе может быть использован в ка нала ошибки для автоматичес лизации глубины фазовой мод при помощи управляющего сиг
f , XX..-r
Следовательно, с учетом тох о, что I (Ф) sinqi J sin Qt.
lo ) -1|(Р), получают ,,()()
Увеличение глубины фазов ции 1зьш1е значения , 3,831 .„ зывает управляющий сигнал S тельным знаком, уменьшающий модуляций, а уменьшение глу вой модуляции ниже г, вызыва ляющий сигнал S j с положител ком, увеличивающий глубину м Таким образом, реализуется а ческая стабилизация глубины Модуляции,
1,(Р)
(20)
В табл. 2 приведены зависимости бесселевской функции первого порядка
I . (ф) и суммы бесселевских функций .ос
чётных порядков ) от аргумента V в окружности Y f t 3,8317.
Т а б л и ц а 2
, Результаты расчетов по табл. 2 показывают, что значения бесселевских функций четных порядков мало зависят от значения Р в окружности Ф 9, Например, превышение на 2,5% вызывает уменьшение суммы на 0,17%, снижение, т, на 2,5% вызывает уменьшение суммы на 0,13%. В то же время зависимость 1(Ф) от 9 имеет относительно высокую крутизну
I
СР).
. -1ЛЗ,83)
0
Р ъ,ьъ -io,j,j; -.0,40, Результаты табл. 2 показывают
что
5
переменный компонент М1, (f) sinq JsinQt по формуле (11) с выхода перемножителя может быть использован в качестве сигнала ошибки для автоматической стаби- лизации глубины фазовой модуляции при помощи управляющего сигнала
f , XX..-rт
I (Ф) sinqi J sin Qt.
I (Ф) sinqi J sin Qt.
Увеличение глубины фазовой модуляции 1зьш1е значения , 3,8317 рад вы- зывает управляющий сигнал Su. с отрицательным знаком, уменьшающий глубину модуляций, а уменьшение глубины фазовой модуляции ниже г, вызывает управляющий сигнал S j с положительным знаком, увеличивающий глубину модуляции. Таким образом, реализуется автомати- ческая стабилизация глубины фазовой Модуляции,
Q Требуемая гюлярность управляющего сигнала Su обеспечивается тем, что фа- зочувствительный выпрямитель 13 работает синхронно с фазовой модуляцией под действием синхронизирующего сиг- нала S с второго выхода генератора 11 . На выходе селективного блока 9, выполненного в виде гребенчатого фильтра, появляется полигармонический выходной сигнал по формуле (10)
r-UO
s,,,(t). - M c.osq)i((p)
(2KS7t),
cos X (22)
который несет информацию о синфазной составляющей М cosl sinCOt входного сигнала S f,(t) М sin(cOt + Ср ) .
Предложенное устройство для синхронного преобразования имеет высокую точность преобразования входного сигнала, поскольку обеспечивается автоматическая стабилизация глубины фазовой модуляции опорного сигнала. Ре- . зультаты анализа показывают, что уже умеренная точность стабилизации (погрешность в пределах 2,5%) обеспечивает достаточно высокую точность преобразования (погрешность ниже 0,2%), а повып1енная точность стабилизации с погрешностью ниже jj;1,0% обеспечивает достаточно высокую точность преобразования (погрешность ниже +0,05%). Достижение точности стабилизации с
)
to
ф ициент стабилизации в порядке нескольких десятков, поскольку без ста билизации на практике достигается по грешность глубины фазовой модуляции порядка 10%.
Использование постоянного компонента с выхода перемножителя в качестве сигнала ошибки и применение . фильтра нижних частот для его выделе ния (первый вариант выполнения) является наиболее простым решением, но точность стабилизации может оказаться недостаточной, поскольку сдвиг и 15 дрейф нуля перемножителя действуют как дестабилизирующие факторы.
Использование переменного сигнала с частотой модуляции в качестве сигнала ошибки и применение выпрямления (второй вариант выполнения) является более сложным решением, но зато достигается более высокая точность стабилизации, поскольку исклю20
.,-,чается влияние сдвига и дрейфа нуля
погрешностью ниже +1,0% требует козф- 25 перемножающего узла.
)
to
8937210
ф ициент стабилизации в порядке нескольких десятков, поскольку без стабилизации на практике достигается погрешность глубины фазовой модуляции порядка 10%.
Использование постоянного компонента с выхода перемножителя в качестве сигнала ошибки и применение . фильтра нижних частот для его выделения (первый вариант выполнения) является наиболее простым решением, но точность стабилизации может оказаться недостаточной, поскольку сдвиг и 15 дрейф нуля перемножителя действуют как дестабилизирующие факторы.
Использование переменного сигнала с частотой модуляции в качестве сигнала ошибки и применение выпрямления (второй вариант выполнения) является более сложным решением, но зато достигается более высокая точность стабилизации, поскольку исклю20


| название | год | авторы | номер документа |
|---|---|---|---|
| Синхронный преобразователь (его варианты) | 1981 |
|
SU1589371A1 |
| Устройство для измерения амлитудно-фазового распределения поля антенны | 1988 |
|
SU1589222A1 |
| Устройство для раздельного приема двух сигналов с угловой модуляцией и синхронными несущими частотами | 1979 |
|
SU886257A2 |
| Линия связи с частотной модуляцией | 1987 |
|
SU1515376A1 |
| Устройство для компенсации дрожания фазы сигнала в системах передачи данных | 1985 |
|
SU1243135A1 |
| Система для передачи и приема сигналов с одновременной амплитудной и частотной модуляцией | 1984 |
|
SU1256219A1 |
| Квазикогерентный демодулятор сигналов манипуляции с минимальным сдвигом | 1987 |
|
SU1561214A1 |
| УСТРОЙСТВО ЛИНЕЙНОГО УСИЛЕНИЯ СИГНАЛА С АМПЛИТУДНОЙ И ФАЗОВОЙ МОДУЛЯЦИЕЙ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНЫХ УСИЛИТЕЛЕЙ | 2013 |
|
RU2541843C1 |
| СПОСОБЫ И УСТРОЙСТВА ПОВЫШЕНИЯ ИНДЕКСА УГЛОВОЙ МОДУЛЯЦИИ | 2012 |
|
RU2493646C2 |
| Устройство для фазовой автоподстройки частоты | 1982 |
|
SU1095418A1 |

Изобретение относится к радиотехнике и радиоизмерительной технике и может быть использовано в фазочувствительных приборах. Цель изобретения - повышение точности. Сущность: между выходом перемножителя и вторым входом фазового модулятора введены последовательно соединенные фильтр нижних частот, блок с управляемым коэффициентом передачи и сумматор, при этом вторые входы блока с управляемым коэффициентом передачи и сумматора подключены к выходу генератора модулирующих синалов. В вариантном исполнении между выходом перемножителя и вторым входом фазового модулятора введены последовательно соединенные фазочувствительный выпрямитель, блок с управляемым коэффициентом передачи и сумматор, при этом вторые входы сумматора и блока с управляемым коэффициентом передачи подключены к первому выходу генератора модулирующих сигналов, второй выход которого подключен к второму входу фазочувствительного выпрямителя. 1 с.п. ф-лы, 2 ил.
0«./
Фиг.2
| Патент США № 3329900,кл.325-346 1967 | |||
| Авторское свидетельство СССР № 814237, 1ш | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
