Выход /
Выход$
СП
СО
tvO
со
31
Изобретение относится к приборостроению и может быть использовано н железнодорожном транспорте для измерения скорости и пути, пройденного локомотивом.
Целью изобретения является повы- пение точности измерения скорости.
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - схема блока вычислений коэффициента пересчета времени измерения и коэффициента пересчета пути; на фиг. 3 - схема блока измерения скорости дви- жeшiя; на фиг. Д - осциллограмма процесса ускорений буксового узла.
Устройство содержит датчик 1 ускорений с согласугогтим усилителем,, компаратор 2, импульсньп датчик 3 с формирователем, блок 4 вычислений, первый счетчик 5, блок 6 измерения скорости, генератор 7 имггульсов, блок 8 измерения пути, второй счетчик 9. Блок 4 вычислений содержит микропроцессор 10, ОЗУ 11, ПЗ У 12, входной 13 и выходной 14 регистры. Блок 6 измерения скорости содержит счетчик 15, регистр 16, передатчик 17. Последовательно соединенные датчик ускорений с согласующим усилителем 1, компаратор 3, блок 4 вычисле- ний, первьп счетчик 5, блок 6 измерений скорости, выход генератора импульсов соединен с вторым входом первого счетчика 5, второй выход блока вычислений - с первым входом второго счетчика 9, второй вхоД которого соединен с выходом датчика с формирователем 3 и первым входом блока 6 измерения скорости, выход второго счетчика 9 соединен с входо блока 8 измерения пути.
Устройство для измерения параметров движения работает следуицим образом.
При движении локомотива от датчи 3 оборотов колеса поступают импуль- сы,число которых пропорционально проденному пути, а частота пропорциона на скорости движения локомотива
f 3-- V n,V,
(1)
f - частота импульсов датчика;
Z - число импульсов датчика на оборот колеса;
Л - ;ц- аметр круга катания колеса;
п - число импvльcoв на один метр
If
круга катания колеса.
5
0
5
0
45
50
55
Число и частота импульсов при постоянных значениях пути и скорости меняются по мере износа колеса локомотива. Импульсы датчика 3 поступают на первьпЧ вход блока 6 измерения скорости и второй вход второго счетчика 9. На. второй вход блока 6 поступают импульсы интервала Т времени измерения скорости движения. Интервал времени измерения формируется счетчиком 5 с переменным коэффициентом заполнения, KoTopbtfi устанавливается равным коэффициенту N. пересчета времени измерения, вычисленному блоком 6 в период проведения коррекции. Импульсы генератора 7 поступают на второй вход счетчика 5 и заполняют его до значения, равного коэффициенту N пересчета време ни измерения. После заполнения счетчика 5 он обнуляется и цикл его заполнения повторя-. ется. На выходе счетчика 5 формируют-, ся импульсы, период которых равен интервалу , времени измерения.
Сигнал поступает на второй вход счетчика 15, который подсчитывает количество импульсов, поступивших с выхода датчика 3 оборотов колеса за время Tj,3 , и записьшает в выходной регистр 16 код скорости, который затем через передатчик 17 поступает на первый выход устройства, а счетчик 15 и регистр 16 с приходом последующего импульса Туд обнуляется.
Измерение пути движения осуществляется следующим образом.
На первый вход второго счетчика 9 поступает значение кода коэффи1щента Нл пересчета пути движения, вычисление которого осуществляется в период проведения коррекции устройства. N численно равно количеству импульсов датчика 3 на единицу длины пройденного пути.
Счетчик 9 подсчитывает число импульсов, поступающих с выхода датчика 3, а по достижении числа N формирует на выходе импульс переноса и начинает счет с нуля. Таким образом, счетчик 9 формирует один импульс на каждую .единицу пройденного пути. Эти импульсы поступают в блок 8 измерения пути на вход суммирующего счетчика, который производит подсчет пройденного пути. Код пройденного пути через передатчик поступает на второй выход устройства.
515
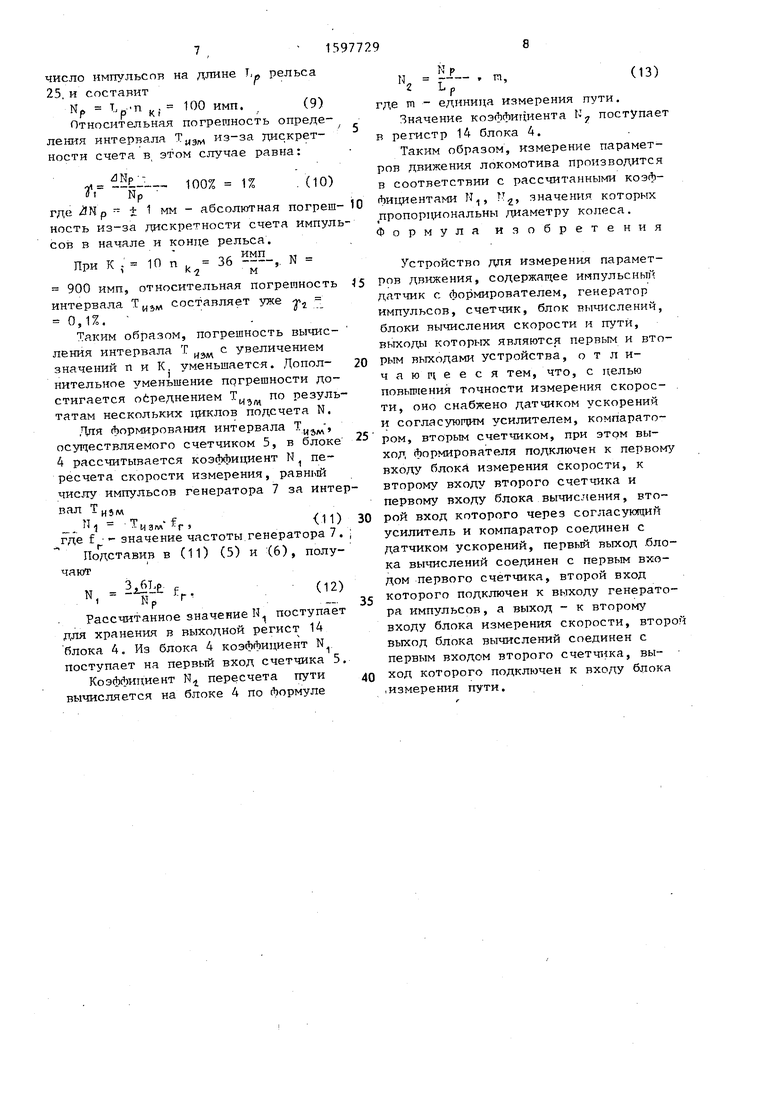
При движении локомотива по рельсам известной длины сигналы начала и конца рельса выделяются компаратором 2 из процесса ускорений, измеренного датчиком 1 ускорений, который установлен на буксовом узле локомотива. В качестве примера на фиг. 4 представлена осциллограмма записи процесса ускорений буксового узла, замеренного датчиком -ускорений. На осциллограмме четко различаются всплески при прохождении стыков рельсов, т,.е. начала и конца рельсов. Для
ИЭлл
выделения сигнала начала и конца рель-, но равен 1 с. Значение оптимального
са компаратор настраивается на уровень порогового напряжения, который -показан на осциллограмме линией. При значении напражения датчика 1, превьш1аюгцего этот уровень, на выходе компаратора появляются им- пульсм соответствую1ч 1е началу и концу .рельса.
После включения в блоке 4 режима коррекции по фронту первого импульса, поступающего с вьпсо да компаратора 2, в блоке 4 начинается счет импульсов датчика оборотов, по фронту второго счет заканчивается. По результату счета в блоке 4 осуществляется расчет коэффициентов N, N по формулам полученным из следуюршх соотношений.
Частота следования импульсов датчиков оборота колеса
интервала получено на основании пра тического опыта, а также исходя из известных данных. Например, в извест ном устройстве интервал времени из20 мерения скорости равен 1 с. Увеличение Ту в несколько раз приводит к потере информягцга на коротких участках пути, а также увеличению погрешности измерения особенно при измене25 НИИ скорости движения, так как устро ство при этом измеряет среднее значе ние скорости за интервал Т , которое отличается от скорости за более короткое время внутри этого интерва30 ла Т
W3«
Уменьшение интервала
чзм
в
несколько раз приводит к получению избыточной информации, а также увеличению погрешности измерения, особенно при малых скоростях движения.
f- - Nr Т
МЗЛД
где N - число импульсов датчика 3 за интервал времени измерения ТИЭГУ ,
тогда интервал Tj времени измерения
полученный из соотношений (1) и (2) определяется как
Nr
иглА п . V
Число N импульсов датчика оборотов колеса выбирается равным значению тeкyFJ eй скорости движения
.; т- Укм/ч 3,6V ---,
(4)
Тогда интервал Tj , вычисленньй из формул (3) и (4) принимает вид
Т -
НЗМ II
зависит
к от
численного
например, при п 3,(
этом вычисляется НИИ по формуле
в блоке 4
т 1 - излл
вычислепри
п„ :-
LP
(6)
где N- - импульсов датчика оборотов по длине Lp, номинальное значение которой записано в постоянной памяти блока 4.
Оптимальное значение интервала Т скорости движения выбирается исходя из указанных требований к частоте поступления результатов измерения скорости движения локомотива. Наиболее оптимальньпЧ интервал Т
ИЭлл
примерно равен 1 с. Значение оптимального
интервала получено на основании практического опыта, а также исходя из известных данных. Например, в известном устройстве интервал времени из20 мерения скорости равен 1 с. Увеличе ние Ту в несколько раз приводит к потере информягцга на коротких участках пути, а также увеличению погрешности измерения особенно при измене25 НИИ скорости движения, так как устройство при этом измеряет среднее значение скорости за интервал Т , которое отличается от скорости за более короткое время внутри этого интервала Т
W3«
Уменьшение интервала
чзм
в
35
несколько раз приводит к получению избыточной информации, а также увеличению погрешности измерения, особенно при малых скоростях движения.
Лля вычисления оптимального интервала ТУЗИЛ с заданной точностью выра жение (5) представим в следунщем виде:
ИЗЛЛ
п „
(7)
где
К 45
коэффициент увеличения точности вычисления, выбирается из ряда К( 1, 10, 1000. При этом число соотношения
п вычисляется из
п
с.К.
(8)
где с выбирается близким или равным значению числу 3,6.
5Q По мере износа колес локомотива число импульсов датчика на оборот колеса увеличивается, а интервал Т, вычисляемый блоком 6 по формуле (7), уменьшается.
55
Погрешность интервала Т связана с определением числа импульсов датчика оборотов колеса на эталонной длине рельса. При числе импульсов п на метр оборота колеса, равным 4,
число импульсов на длине 1, рельса 25 и составит
NP т ..п , 100 имп. , (9) Относительная погрешность определения интервала из-за дискретности счета в, этом случае равна:
100% 1%
. (10)
Np. Np
где 4Np ± 1 мм - абсолютная погрет- ность из-за дискретности счета импульсов в начале и конце рельса.
, имп „ При К. 10 п , 36 ---,. N 900 имп, относительная погрешность интервала Т,,, составляет уже
0,1%.
Таким образом, погрешность вычисления интервала Т м Увеличением значений п и К. уменьшается. Лопол- нительное уменьшение погрешности достигается ойреднением Т, по результатам нескольких щклов подсчета N. ,Пдя формирования интервала , осуществляемого счетчиком 5, в блоке 4 рассчитывается коэффициент N пересчета скорости измерения, равный числу импульсов генератора 7 за интервал Тц5лд
т - т f111;
I 1 - ИЗМ -г -,
Где f - значение частоты генератора /. Подставив в (11) (5) и (6), получают
«, 4 f г(12)
Рассчитанное значением поступает для хранения в выходной регист 14 блока 4. Из блока 4 коэффициент N поступает на первый вход счетчика 5.
Коэффициент N пересчета пути вычисляется на блоке 4 по формуле
0
г IT
(13)
5
О
где m - единица измерения пути.
Значение коэффшшента N,, поступает в регистр 14 блока 4.
Таким образом, измерение параметров движения локомотива производится в соответствии с рассчитанными коэффициентами М, , значения которых пропор1Щональны диаметру колеса. Формула изобретения
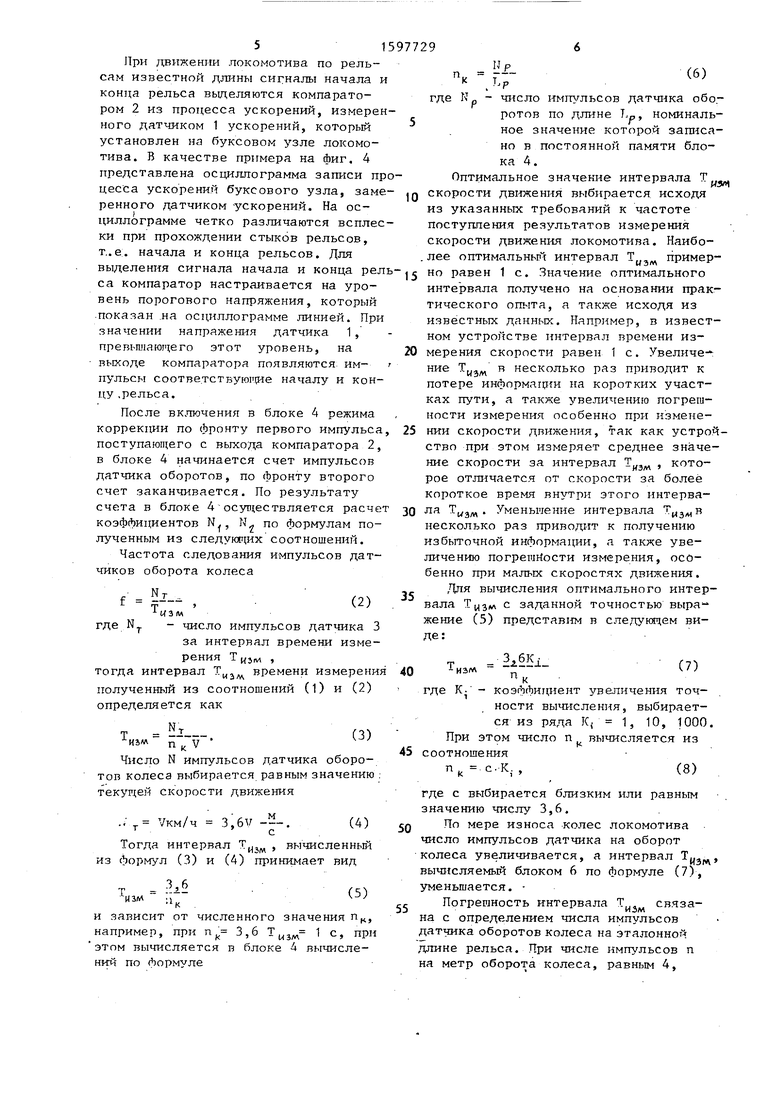
Устройство для измерения параметров движения, содержащее ияпульсньЛ датчик с формирователем, генератор импульсов, счетчик, блок вычислений, блоки вычисления скорости и пути, выходы которых являются первым и вторым выходами устройства, отличающееся тем, что, с целью повышения точности измерения скорости, оно снабжено датчиком ускорений и согласующим усилителем, компаратором, вторым счетчиком, при этом выход формирователя подключен к первом входу блока измерения скорости, к второму входу второго счетчика и первому входу блока вычисления, второй вход которого через согласующий усилитель и компаратор соединен с датчиком ускорений, первьп выход .блока вычислений соединен с первым входом первого счетчика, второй вход которого подключен к выходу генератора импульсов, а выход - к второму входу блока измерения скорости, второй выход блока вычислений соединен с первым входом второго счетч11ка, выход которого подключен к входу блока .измерения пути.
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель скорости локомотива | 2022 |
|
RU2793551C1 |
| Устройство для измерения параметров движения локомотива | 1984 |
|
SU1283659A1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ИЗНОСА КОЛЕС РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2203819C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 1995 |
|
RU2074829C1 |
| Локомотивная система определения скорости движения и пройденного пути | 2023 |
|
RU2808862C1 |
| Устройство для измерения скорости транспортного средства | 1987 |
|
SU1541086A1 |
| Система определения скорости локомотива | 2023 |
|
RU2809393C1 |
| СПОСОБ КОНТРОЛЯ КРИТИЧЕСКОГО СОСТОЯНИЯ ПОДВИЖНОГО СОСТАВА НА РЕЛЬСОВОМ ПУТИ И РЕГИСТРАЦИИ ЕГО СХОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399524C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ ПОДВИЖНОГО СОСТАВА ПРИ СХОДЕ ВАГОНА С РЕЛЬСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2284928C1 |
| АНАЛИЗАТОР ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОКОМОТИВА | 2012 |
|
RU2526730C2 |

Изобретение относится к области приборостроения и может быть использовано на железнодорожном транспорте для измерения скорости и пути, пройденного локомотивом. Цель изобретения - повышение точности измерения скорости. Блок 4 вычислений, используя информацию о длине рельса и количестве импульсов с выхода датчика с формирователем 3 от одного стыка до другого стыка, рассчитывает два коэффициента N1 и N2, которые поступают соответственно в первый 5 и второй 9 счетчики. Оба коэффициента рассчитываются для диаметра измерительного колеса с учетом его текущего износа. Коэффициент N1 задает интервал времени, за который подсчитывается пройденный путь, а значит, измеряется скорость. Коэффициент N2 задает отрезок пути для подсчета общего их количества, т.е. измерения пути. Измерение скорости осуществляется блоком 6, а пути - блоком 8. 4 ил.
Процесс ускорений Монемты прокож ния стыкод
логе
Jp- ZSn
Фиг. 5
Уродем cfloSamuiuMa нанааратоа
| Устройство для измерения параметров движения локомотива | 1984 |
|
SU1283659A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
